机器人技术在高速公路运营中的应用
2020-08-25王志锦
王志锦


摘 要:本文阐述了高速公路智能巡逻机器人、高速公路隧道巡检机器人、隔离带清洁机器人在高速公路中运营中的应用,重点讲述了这几种机器人的系统组成、工作过程及使用注意事项等。
关键词:机器人;智能巡逻;隧道巡检;垃圾拾捡
中图分类号:TP242;U495文献标识码:A文章编号:1003-5168(2020)19-0098-03
Abstract: This paper described the application of highway intelligent patrol robots, highway tunnel inspection robots, and isolation belt cleaning robots in highway operations. It focused on the system composition, working process and precautions of these kinds of robots.
Keywords: robot;intelligent patrol;tunnel inspection;garbage picking
先進的机器人技术、数据通信技术在高速公路运营中的应用,使得现在的高速公路运营管理越来越智能化。高速公路行业已经由密集型产业逐步转为智能管理型产业,车辆、道路、使用者三者之间的联系更加密切,形成一种安全、高效的运输系统[1]。本文主要介绍了几种典型机器人在高速公路运营中的应用,重点讲述了这几种机器人的系统组成、工作流程及使用注意事项等。
1 高速公路智能巡逻机器人
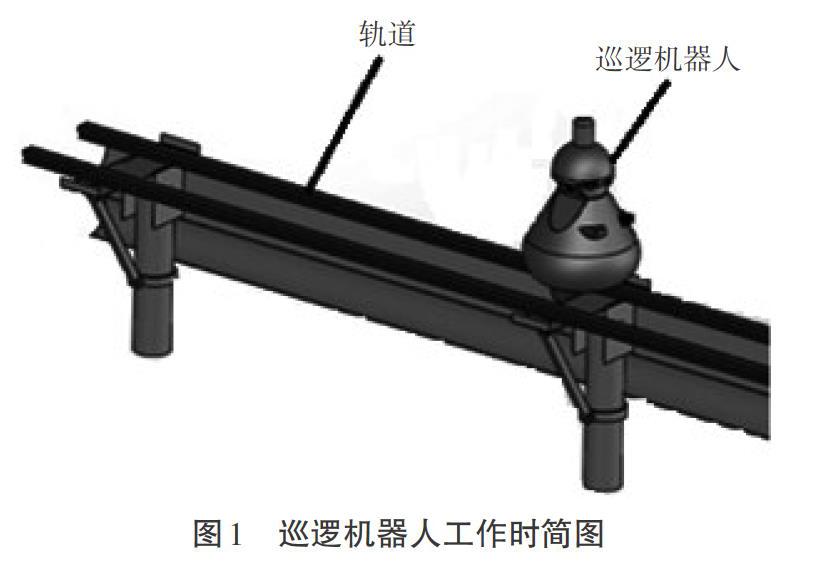
智能巡逻机器人以高速公路护栏为轨道,可沿公路护栏前行、后退、停止。图1是机器人在高速公路护栏上工作时的简图。
1.1 主要功能及系统组成
1.1.1 主要功能。高速公路智能巡逻机器人主要用于监测高速公路运行工况,包括应急车道违规占用情况监测;事故预警;路面流量信息、拥堵状况的实时监测;现场能见度、降雨降雪量、风速等气象环境监测[2]。
1.1.2 系统组成。智能巡逻机器人由机械系统、电气控制系统、监测预警系统、远程通信控制系统等组成。机器人本体主要部件如图2所示。
对于机械系统,主要依据高速公路护栏的波浪型结构进行适应性设计,确保机器人能在护栏上高速平稳运行;同时,轮子上设置悬挂结构,以减轻机器人通过护栏连接处时产生的强烈震动,减少机器人震动冲击对高精度设备的影响,延长使用寿命。
电气控制系统控制机器人本体运行的路径与能量供给,并规划及控制机器人运行路径。
监测预警系统能实时监测路况信息,通过先进的视频雷达数据融合技术及时发现道路安全隐患,并做出准确判断。
1.2 工作过程及其优点
1.2.1 工作过程。高速公路智能巡逻机器人在工作时,机器人本体上集成的高清摄像机、高精度传感器等能实时监测路况信息,及时发现高速公路上的安全隐患。系统通过无线网络将信号和数据传输给路段监控中心。路段监控中心管理人员可以通过登录移动巡逻机器人应用APP,实时监测路况,同时操控指定巡逻机器人进行移动检测。通过巡逻机器人应用APP可以实时了解移动巡逻设备的相关情况,包含无线网络、后台服务器是否连接正常,设备存储电量是否充足等。管理人员通过手机也可对巡逻机器人应用APP进行实时监测和控制。
1.2.2 智能巡逻机器人优点。与人工巡查相比,智能巡逻机器人减少了人工、车辆及油料成本,可以避免人工巡查面临的路面交通安全风险,也可大幅增加巡查频次,提高巡查精细化程度。机器人的违章抓拍功能可有效减少各类交通违章行为。事故预警功能能更好地对路面交通事故作出快速反应,降低二次事故的风险。对讲功能对突发情况下人员疏散等起到关键作用。路面病害识别、定位、分析功能对业主单位养护的及时性、科学性以及精细化尤为关键。自动充电功能确保机器全天候运行。
2 高速公路隧道巡检机器人
高速公路隧道巡检机器人有别于高速公路智能巡逻机器人,其是专门针对隧道的复杂情况设计的一款巡检机器人。该机器人主要对隧道内设有的交通诱导、交通环检、环境检测、通风照明、火灾报警等设备进行巡视监测。
2.1 隧道机器人活动区域
隧道巡检机器人与智能巡逻机器人最大的不同在于活动区域的特殊性。隧道机器人的活动区域在隧道两侧的电缆盖板上,能活动的区域较为狭长,机器人活动区域如图3所示。
从图3可以看出,隧道机器人的活动区域具有路面狭窄(宽度100 cm),行进道路较直,空隙、凸起较多等特点。
2.2 路径检测
为了让隧道巡检机器人在上述活动区域内稳定运行,隧道机器人系统自身有一套路径检测系统。该系统采用多个光电传感器来进行路径检测,主要检测道路边界、道路空隙、道路台阶3个方面。
隧道巡检机器人对道路边界进行检测时,采用2个光电传感器,在隧道机器人机身两侧各安装一个。隧道巡检机器人在隧道中行使时,只开启靠近墙壁的光电传感器测量机器人到墙壁的距离,光电传感器会随时感知机器人一侧到隧道壁的距离,根据光电传感器的反馈距离,调整自身行进线路,使机器人始终与侧壁的距离保持在一个安全范围内。
隧道巡检机器人对道路的空隙进行检测时,主要采用安装在机器人前端触角结构上的光电传感器。光电传感器向地面发射光信号,探测光强度的变化,当遇到缝隙时,光强会发生变化,光电传感器将光信号转化为电信号,经过系统硬件和软件计算机器人的行走路径。
隧道巡检机器人对道路的台阶进行检测时,主要采用安装在机器人前后端的光电传感器。当遇到台阶时,光会发生反射效应,光信号的变化引起电信号的变化,通过系统自身的软硬件,反馈给机器人本体,机器人调整行进路径,绕开台阶。
