可变制动策略紧急制动控制系统的建模与仿真研究
2020-08-25熊焱刘斌
熊 焱 刘 斌
(1.上海内燃机研究所有限责任公司,上海 200438;2.上海汽车集团股份有限公司商用车技术中心,上海 200438)
0 前言
美国高速公路安全管理局(NHTSA)根据相关调查表明[1],90%以上的交通事故都是由于驾驶员主观原因导致的,其中追尾碰撞占比高达30%以上。欧洲新车安全评鉴协会(Euro-NCAP)和澳大利亚新车安全评鉴协会(A-NCAP)研究指出[2],无论在城市道路还是城郊道路下,自动紧急制动系统(AEB)能有效地降低38%的追尾碰撞事故。然而,在研究不同制动策略的AEB系统对车辆性能表现影响时,固定的单级或双级制动策略往往无法满足快速便利的研究需求[3-4]。
为了解决上述问题,本文从AEB控制系统输出控制模块入手,创新性地提出对AEB控制系统中的部分制动请求进行计数,并在全制动请求发出条件设置部分请求制动数阈值,以此通过相关参数实现对AEB系统部分制动请求和全制动请求进行控制。通过CarSim与Simulink软件进行仿真试验,验证了设计模型的合理性和该方法的可行性。该方法为AEB控制系统制动策略研究提供了便利,在一定程度上也为AEB控制系统开发和研究提供了新的思路。
1 AEB控制系统联合仿真模型
1.1 AEB制动策略可变控制设计
车辆在行驶过程中,当AEB系统监测到车辆前方有潜在危险时,通过发送ABE预填充(ABP)请求信号,请求车身电子稳定性控制系统(ESC)增加较小的主缸压力,从而消除制动间隙。与此同时,根据不同工况下的危险程度发送自适应制动辅助(ABA)请求信号和ABA激活等级信号。AEB系统按危险等级发出部分制动请求信号、全制动请求信号,以及相应的AEB目标减速度请求信号。
为了实现制动策略可变的设计要求,通过图1所示模块对AEB部分制动请求信号进行计数。在AEB部分制动请求信号发出后,利用基础采样时间延迟的方法,对AEB部分制动请求信号进行计数。以此得到当前AEB控制系统向执行器发出时序上最近的部分制动请求信号前的AEB部分请求计数值。
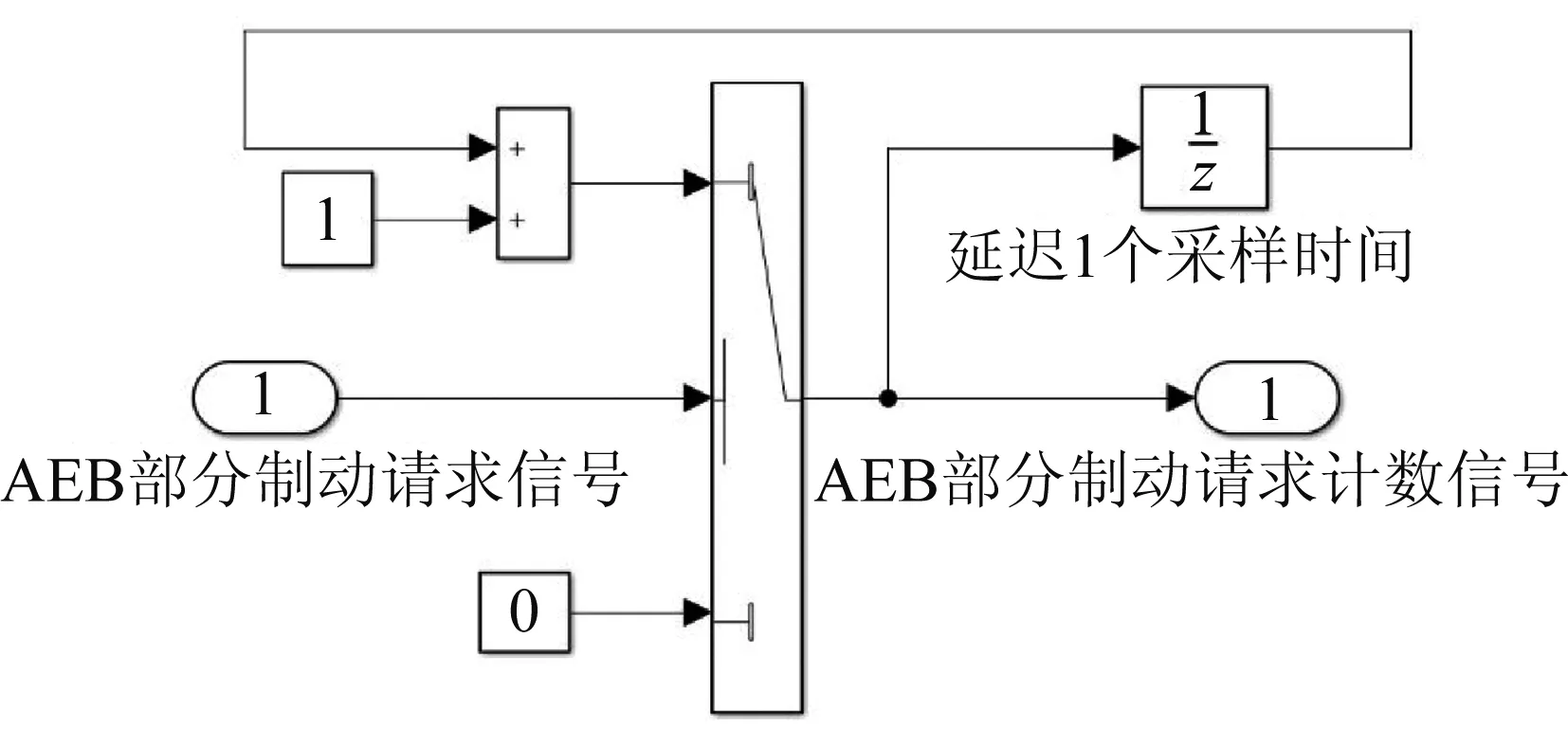
图1 部分制动请求信号计数模块
如图2所示,通过模块用于全制动请求信号发出的最后判断条件,AEB全制动请求初始信号满足除其他发出全制动请求信号条件的所有指示信号。当AEB全制动请求初始信号为真且部分制动信号计数大于AEB部分制动计数阈值时,AEB控制系统才会发出全制动请求信号,若二者之中有信号为假时,则全制动请求信号也为假。其中,AEB部分制动计数阈值用于控制全制动请求前的部分制动请求信号的循环数,是在一定范围内实现制动策略可变的重要参数。
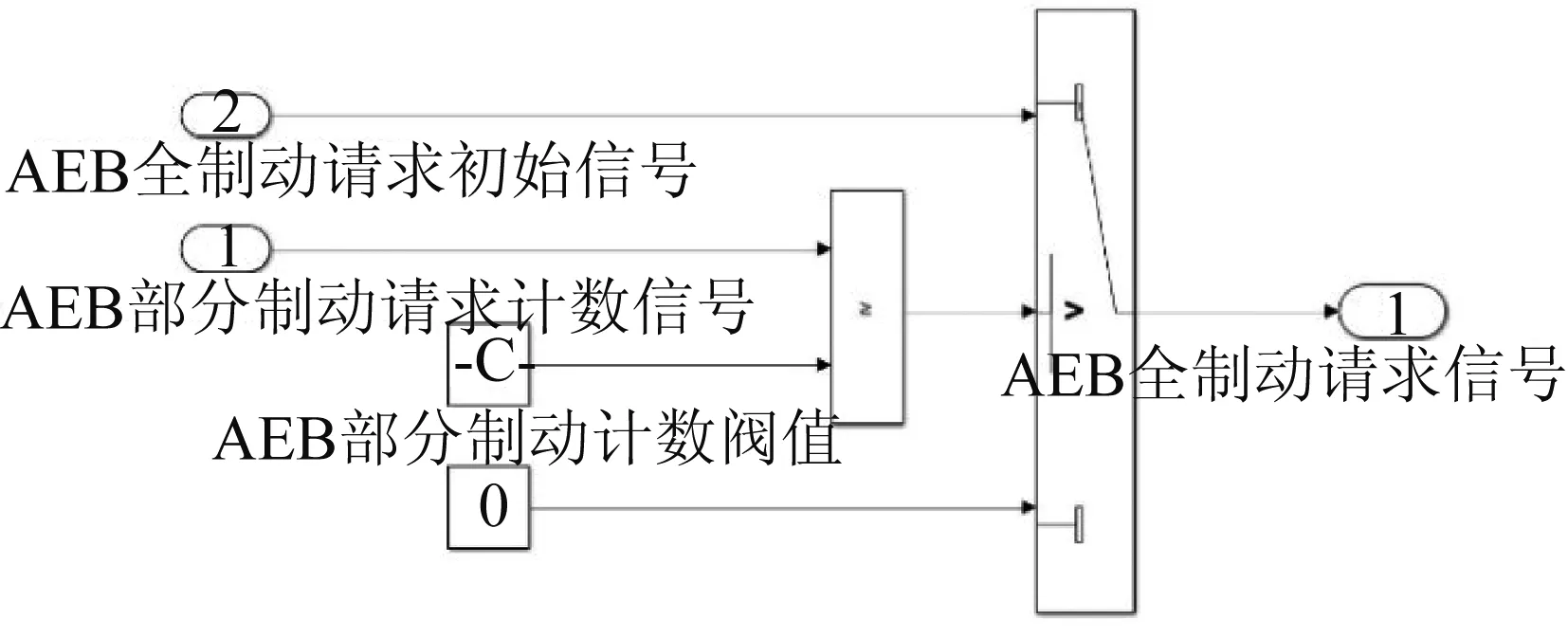
图2 全制动请求信号局部控制模块
本文基于安全时间模型设计了AEB控制系统,并对AEB控制系统目标在径判断、碰撞时间阈值、制动等级确定和系统输出控制等模块进行了Simulink建模设计。图3为设计的AEB控制系统整体模型。
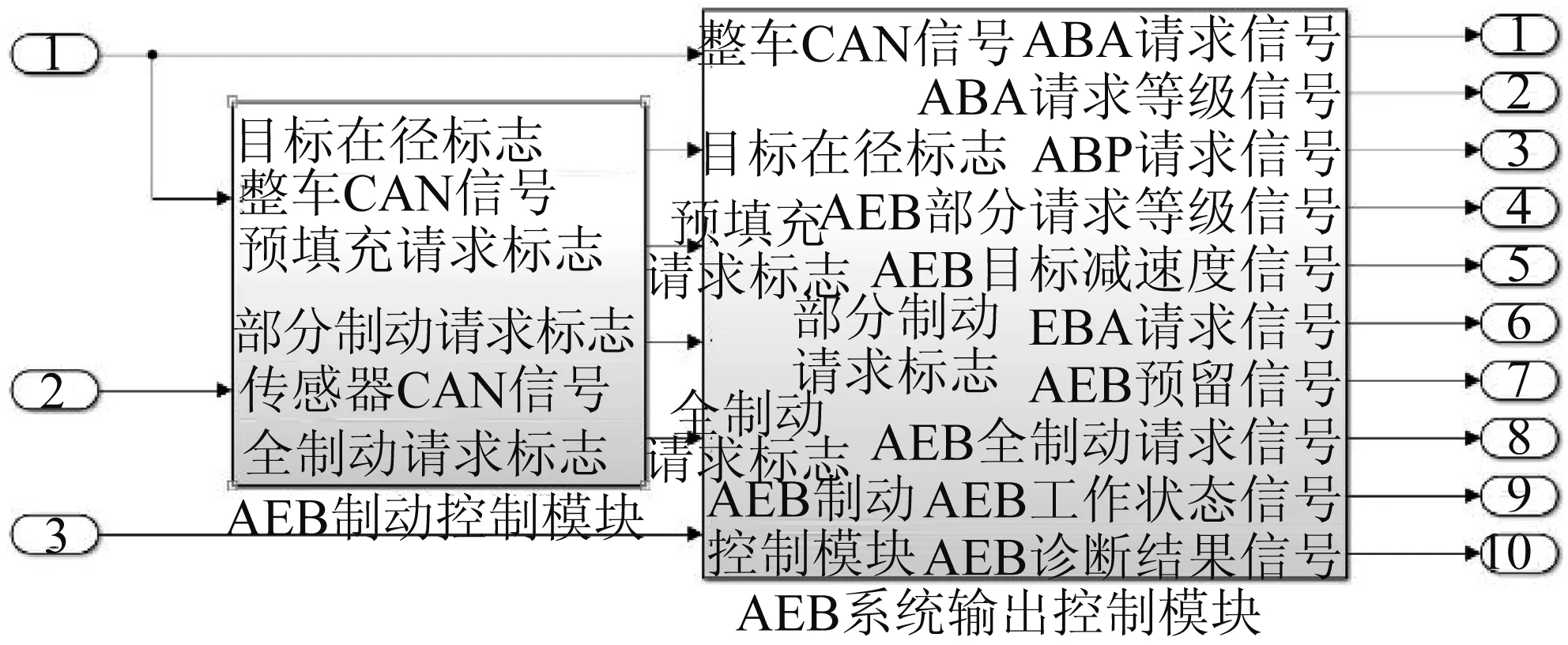
图3 AEB控制系统整体模型
1.2 联合仿真模型
为了验证控制模型和实现制动策略可变方法的合理性,需要建立整车动力学模型。本文通过上汽某款车型为参考,相关车型参数如表1所示,在CarSim中建立整车模型,定义CarSim和Simulink仿真接口及试验工况。
当AEB激活工作前,需要通过节气门控制动力学模型车速。AEB控制系统在激活后工作时,会以开环方式控制车速,并按AEB请求的目标减速度尽可能减小车速。在AEB激活工作过程中,节气门开度降至怠速状态。对于复杂的逆动力系统模型,可以简化为AEB激活工作前和激活工作后2个状态。在AEB激活前的极短时间内,可认为车辆是匀速行驶;在AEB工作后,由AEB控制系统控制车辆运动。如图4所示,为了简化逆发动机模型,利用建立好的整车模型和道路模型,在CarSim软件利用闭环控制恒定车速的方法,得出在不同车速下稳定车速状态的节气门开度曲线。
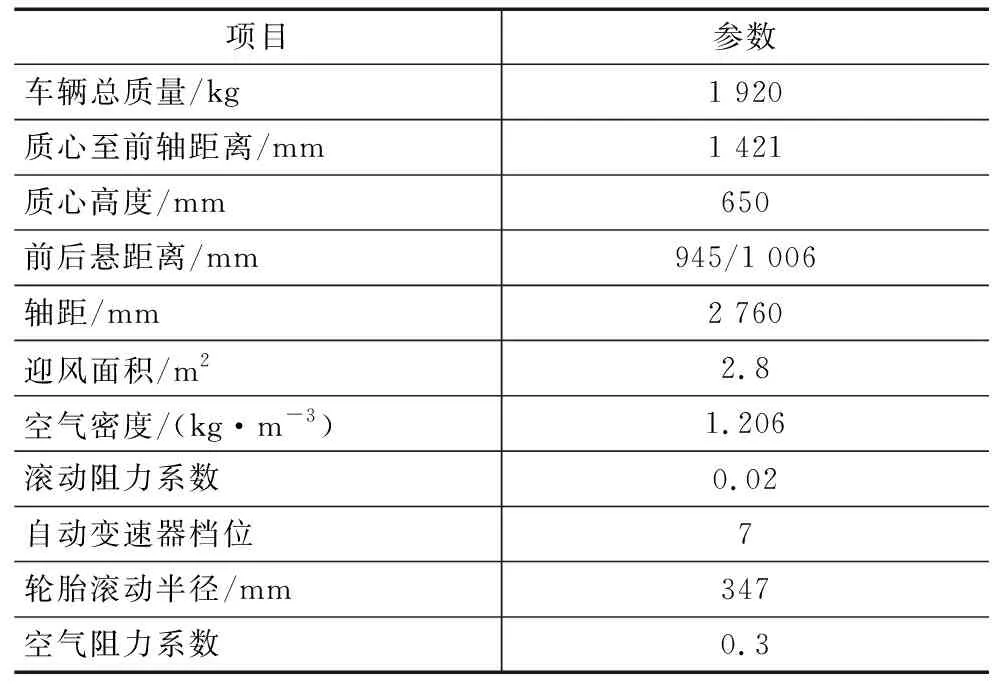
表1 某车型动力学模型基本参数
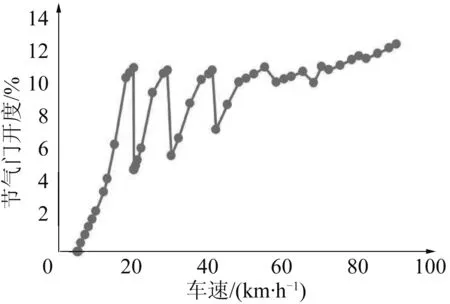
图4 不同车速下的节气门开度曲线
利用一维查表方法,在Simulink软件中设计了简易的逆发动机模型,如图5所示。

图5 简易逆发动机模型
为了模拟实际车辆通过AEB控制的制动过程,本文设计了逆制动系统模型。设计主要思路是根据AEB控制系统发出的减速度请求信号,结合车辆在制动过程中的动力学分析,建立起可作为CarSim软件输入信号的制动主缸压力计算模型。
为了计算整车模型制动力和制动压力参数Kb,在CarSim软件中设置车辆初速度为30 km/h,并在制动主缸输入2 MPa的制动压力,得到前轮制动力矩为600 N·m,后轮制动力矩为300 N·m,车轮滚动半径为0.347 m。根据相关公式可得,Kb值为1 296.83。如图6所示,在Simulink软件中建立逆制动系统模型。图7为Simulink和CarSim软件联合仿真模型。

图6 逆制动系统控制模型

图7 Simulink和CarSim软件联合仿真模型
2 仿真结果分析
2.1 基本思路
根据建立的Simulink和CarSim软件联合仿真模型,在CarSim软件中设置Euro-NCAP中前车静止场景(CCRs)试验工况[5],主车距离目标车辆40 m,并以30 km/h的初速度接近目标车辆。通过改变AEB部分制动计数阈值,观察AEB控制系统性能表现。
2.2 结果分析
当设置AEB部分制动计数阈值等于1时,即AEB系统监测需要采取制动时便请求最大减速度,仿真结果如图8所示。结果显示,随着车间距离的减小,在即碰时间(TTC)满足制动时间阈值后,在3.45 s时,AEB控制系统发出的全制动请求信号值由0变为1,并请求0.8 G的减速度。部分制动请求信号值为0,未发生改变。车辆加速度在短时间内增加至0.8 G,当车速降为0时,后车距离前车1.88 m,未发生碰撞。整个制动过程较为连续,纵向减速振荡较小。由于采取单级最大减速度,主车制动至停车时,车间距离较大,整个制动过程比较符合保守型驾驶员风格,且舒适性较好。
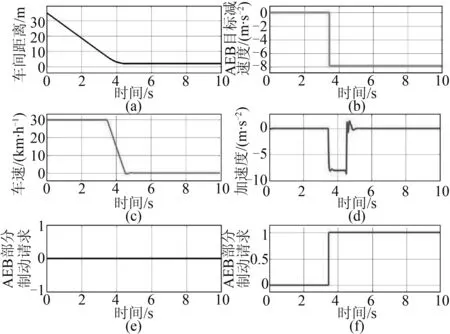
图8 AEB部分制动计数阈值等于1时的仿真结果
当设置AEB部分制动计数阈值等于8时,即采取一定程度的双级制动策略,仿真结果如图9所示。结果表明,在3.45 s时,AEB控制系统发出部分制动请求,AEB部分制动请求信号值由0变为1,系统请求0.4 G减速度,车辆速度开始降低。当AEB部分制动请求计数值满足大于8时,即在3.8 s时,全制动请求信号值由0变为1,相应的AEB目标减速度信号值由部分制动时的0.4 G变为全制动时的0.8 G,符合设计策略。从车辆运动状态可以看出,前期车辆车速的降低较慢,后期车速降低较快。当后车制动至停车时,距离目标车辆0.46 m,未发生碰撞。双级制动策略适合激进型驾驶风格的驾驶员,适合配置在运动型车型上。由于前期制动强度较小,后期制动强度相对较大,整个制动过程不连续,制动过程舒适性较差。

图9 AEB部分制动计数阈值等于8时的仿真结果
3 结论
本文充分利用模型定步长特性,对AEB控制系统中的部分制动请求信号进行计数,并将计数值作为全制动请求发出的判断条件,在AEB控制模型中建立了制动策略可变模块,创新性地实现了在同一AEB控制模型中研究不同制动策略对AEB系统性能的影响。
在CarSim软件中建立了整车动力学模型和仿真工况的基本要素,在Simulink软件中建立了简易逆发动机模型和逆制动系统模型,利用CarSim和Simulink软件对设计的模型进行联合仿真。通过改变AEB部分制动计数阈值,研究了单级和双级制动策略特性的建模仿真方法。结果表明,设计的制动策略可变模块能够较好实现对不同制动策略的AEB控制系统的研究,从而验证了设计方法的合理性和有效性。
