基于单片机Cubli自平衡机器人控制系统设计
2020-08-23胡帅李艳刘杰王龙
胡帅 李艳 刘杰 王龙
摘要:本文对自平衡机器人进行理论分析,根据机器人控制系统的实际特点,设计了采用STM32单片机开发的Cubli自平衡机器人控制系统。该系统采用集成惯性轮、电机、传感器陀螺义、编码器和加速度计等传感器作为机器人的传感器和执行机构。机器人运行平稳,能够满足特种环境作业、教学研究的要求。
关键词:自平衡机器人;单片机;控制系统
中图分类号:TP242 文献标识码:A 文章编号:1672-9129(2020)04-0048-01
Abstract:In this paper, the self-balancing robot is analyzed theoretically. According to the actual characteristics of the robot control system, the Cubli self-balancing robot control system developed by STM32 microcontroller is designed. The system USES integrated inertial wheel, motor, sensor gyroscope, encoder and accelerometer as sensors and actuators. The robot runs smoothly and can meet the requirements of special environment operation, teaching and research.
Key words:self-balancing robot;Single chip microcomputer;Control system
Cubli自平衡机器人可通过内置的力矩发生装置,能够实现立方体机器人的跳跃运动。立方体机器人控制系统是一个多输入多输出的系统,该系统为强耦合的非线性系统,其控制方法一直是控制领域研究的热点和难点[1]。本文设计的Cabli自平衡机器人由立方体本体、传感器以及微处理器控制系统构成。在微处理器的控制下,立方体本体受到惯性轮加减速转动产生的反作用力矩,传感器将系统参数反馈到控制器实现立方体机器人的姿态控制。
1 Cubli自平衡机器人控制系统原理分析
从建模的角度看,立方体机器人由箱体和布置在箱体三个面上的惯性轮共四个刚体构成。分别以立方体角点o、立方体机器人的质心点c为原点,建立固定坐标系o-xyz、机体坐标系o-xbybzb和惯性轮坐标系o-xf yf zf,其中坐标轴xf、yf、zf分别指向惯性轮A、B、C的回转轴线。
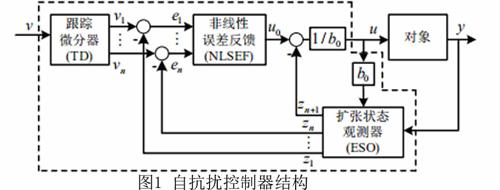
自平衡机器人中的自抗扰控制是以系统设定值、系统被控输出和上一步算出的控制量为其输入确定出新的控制量的控制方法。该方法主要由跟踪微分器、扩张状态观测器和非线性状态误差反馈三部分构成。自抗扰的机理在于把作用于被控对象的所有不确定因素都归结为扰动,用对象的输入输出数据对总扰动进行估计补偿[2]。自抗扰控制器结构如图1所示。
跟踪微分器为输入信号安排过渡过程,能降低初始阶段对系统的冲击、有效解决超调与快速性的矛盾,并增强控制器的适应性;扩张状态观测器是在状态观测器中把作用于开环系统的加速度实时作用量扩充为新的状态变量,将原来的非线性控制系统变为线性的积分器串联型控制系统,对系统的内扰和外扰进行动态估计补偿,是自抗扰控制中的最核心技术。
2 系统结构设计
在机器人为立方体结构,在机器人的三个侧面安装有惯性轮,作为辅助轮。整个机器人电路部分有多个层面电路层叠构成。为了便于调试和显示观察,最上面一层设置为STM32F103单片机的核心系统以及显示系统。系统配置彩色小型显示屏用来显示机器人的状态参数。为保护各种高精度传感器,在第二层放置各种传感装置,可以缩短与单片机的通讯距离提高信号质量,还能减少其他信号干扰,提高机器人的可靠性。第三层防止电池已经驱动装置,布局上尽量均衡分布,平衡重心[3]。
3 控制系统设计
针对Cubli自平衡机器人的硬件平台搭建问题,本系统采用基于STM32位单片机搭建机器人的主控模块,主控模块完成机器人的姿态解算、基于编码器与姿态数据对电机控制飞轮使其保持平衡。Cubli有三个内置的转轮,它们沿着不同的轴调整转速和角动量,从而产生足够的动力来保持立方体的平衡。Cubli机器人三个垂直表面的法线方向都被飞轮稳定起来,于是在三维空间里获得了相当的稳定性[4]。反应轮作用是由电动马达连接的转轮,根据不同的旋转速度向着惯性的反方向转动,从而达到不倒翁的功能——悬停。反应轮转动使一条边线与底面接触,达到单边平衡的状态,反应轮旋转转动,使单点站立平衡,达到了移动的目的。
Cubli自平衡机器人的硬件系统结构主要由STM32F103芯片作为主控芯片,同时配置加速度计和陀螺仪各一个,用来检测机器人的运动姿态。系统设置有驱动电机以及配套的电机驱动器并配置有编码器,可以精确测量机器人的运行速度,作为反馈量提供给单片机控制系统。
机器人的倾斜角度和角速度由速度计和陀螺仪进行检测,然后由STM32单片机计算出实际的状态。本设计中加速度计采用 MMA7260作为状态测量芯片,将MMA7260检测到的模拟信号接入STM32F103的A/D模块,测量运动加速度。
4 结论
本文设计的基于STM32单片机的Cubli自平衡机器人,结构功能完善,系统稳定,可靠性高,方便快速改装并且操作简单。可代替人工进入环境恶劣或者危险区域,代替人们执行任务,能满足各种不同环境的使用要求。同时该机器人能够广泛的应用于教育领域,激发学生的创造性和学习的积极性,具有一定的应用前景。
参考文献:
[1]趙鲁.基于STM32扫地机器人的设计与实现[J].国外电子测量技术,2018.11:100-103.
[2]殷盛洁.基于自抗扰技术的异步电动机速度控制[J].中国科技信息,2013.01:89-91.
[3]程玉凯.基于单片机控制的智能机器人系统设计[J].宁波职业技术学院学报,2011.5:1-4.
[4]李想,夏棚等.基于STM32 单片机的电缆探伤机器人系统设计[J].科学技术创新,2020,16:85-87.
作者简介:胡帅(1998-),男,本科生,从事单片机应用开发方面的学习与研究。
通讯作者:刘杰(1988-), 男, 湖北公安人,硕士研究生,实验师,从事电力电子及智能控制技术研究
