基于SPWVD的离心泵空化致振特征研究
2020-08-22李志红魏晓斌肖博屹
张 松,李志红,梁 兴,魏晓斌,肖博屹
(南昌工程学院 江西省精密驱动与控制重点实验室,南昌 330099)
0 引 言
空化是流动液体的一种特有的物理现象,即当温度一定时,液体局部压力降低到某一临界压力,液体汽化形成空泡的一种复杂的流动现象[1]。在水力机械中,空泡的初生和发展以及溃灭,都会影响水力机械可靠、稳定运行,严重时可导致效率快速下降、机组振动剧烈。空泡的溃灭过程如果发生在固体的表面及附近,将会破坏固体材料,即空蚀现象[2]。比如,苏永生等[3]采用试验手段研究了泵内空化特性,对不同流量的工况下NPSH随流量变化的情况,水声信号和振动信号在模拟试验中基本符合声压规律。贺国等[4]利用傅里叶变换和小波包能量法对离心泵空化脉动进行了研究,对离心水泵空化流场进行数值模拟,分析压力脉动。刘起超等[5]研制了离心泵运行状态在线监测和故障诊断装置,对离心泵的各种参数进行在线监测,建立了故障诊断模型。杨勇等[6]针对空化噪声和超声波特性,结合傅里叶变换和小波分析得到了空化状态下的频谱段。李文浩等[7]运用小波奇异性变换理论对空化程度进行定性定量分析,为空化监测提供了可行的方法。
上述方法在水力机械空化空蚀研究中取得了一定的成果,但是在离心水泵振动信号的处理上缺乏时频聚焦性、分析精度和有效性,对交叉项干扰的问题也没有更好的解决。为了更好的处理空化下的非平稳信号,本文利用SPWVD变换对水泵的振动信号进行分析,得到不同的联合时频分布图。探究在不同水位下离心水泵的空化空蚀情况,以及随着阀门开度的减小空化性能的变化规律。
1 联合时频分布基本理论
离心水泵是否空化取决于泵内压力最低点的压力即装置的空化余量(NPSH值),当压力最低点的压力大于汽化压力时就不会发生空化,即离心水泵的有效空化余量小于必须空化余量时不发生空化,反之发生空化。影响离心泵汽蚀余量的因素很多,如泵的安装过程、测量仪表的精度、测试人员水平等。为了提高离心泵汽蚀余量的测量精度,乔金宇等[8]提出了一种较为精确测量离心泵汽蚀余量的方法。根据汽蚀余量的计算公式,计算离心泵发生汽蚀时进口压力理论值。然后根据计算的理论值调节进口阀门,在汽蚀点附近密集采集试验点,绘制汽蚀曲线,从而达到测量的目的。NPSH值和扬程其定义为:

(1)

(2)
式中:Pb、Pv为当时当地的大气压力值、试验温度下相应的汽化压力值;P1、P2为离心泵进出口截面处的压力值;Z1、Z2为进出口相对于基准平面的高度;v1、v2为离心泵进出口平均流速;ρ为液体密度;g为当地重力加速度。
一般而言,时域信号可以通过傅里叶变换得到不同频率的信号分量,从而完成了从时域到频域的转换。但是,傅里叶变换作为一个整体的变换,没有分析时间定位和时间局域化的能力[9]。实际运用中,为了处理非平稳信号,多采用联合时频分布法,通过建立时间和频率的联合函数,克服了傅里叶变换对频率分析时时域信号缺失,时域分析中频率信号缺失等问题[10,11]。其中,平滑伪Wigner-Ville分布应用较为广泛。其定义为:

(3)

当WVD的核函数常数取1时,信号项和交叉项都无衰减的从模糊函数转化为时频分布,从而较好地解决了非线性交叉项分量的影响[9]。
通过在(4)中加窗函数h(t)够得到PWVD分布,其定义为:
PWVDZ(t,f)=

(4)
其中,时间窗h(t)、h(τ)的作用是对频域作平滑处理[9],使得PWVD抑制WVD在频域方向的交叉项,保证WVD的时域聚集性。但不足之处在于时域方向的交叉项没能得到减弱。
SPWVD弥补了在时域方向的交叉项不足。SPWVD是将PWVD再进行时间方向上的平滑处理,其定义为:

式中:h(t)函数;u为时延。
从上述式中能够得到这样的结论:首先,SPWVD具有WVD的大部分数学性质,时域平滑和频域平滑的尺度得到了有效控制。其次,可以独立选择适当窗函数h(t)和g(t)的长度。在此基础上,本文拟利用SPWVD变换计算获得各工况下振动频域特征。
2 试验装置与试验方法
2.1 试验平台介绍
实验室循环水泵装置如图1所示,本试验装置是由一台异步电机连接扭矩仪再连接离心泵而构成,再通过管路连接集水箱而形成的一个循环装置。集水箱体积V=3 m3,管道公称直径为DN=50 mm。该试验装置布置有扭矩传感器、电机振动传感器、水泵振动传感器、X轴Y轴位移传感器、泵前泵后压力传感器、转速输出传感器,流量输出传感器,如图2所示。本次试验所用的水泵振动传感器垂直布置于离心泵壳上,该传感器的量程为量程0~20 mm/s,电源12 VDC,输出4~20 mA等。本次试验的流量输出传感器为超声波流量计,采用V法安装,上游传感器和下游传感器距离为75.6 mm,可以测量管径范围为DN15 mm~DN400 mm。试验时通过对玻璃管中现象进行观察,运用相机对实验现象进行一一记录。试验证明:水泵振动传感器的空化致振特征最明显。

图1 实验室循环水泵装置Fig.1 Laboratory circulating pump unit

图2 实验室离心泵装置Fig.2 Laboratory centrifugal pump unit
本次试验分为两组实验,试验一为了得到离心泵的必须空化余量,选取该装置在不同水位工况下进行试验,其参数如下:水箱中的水位为135 cm,设计流量Qd=23.75 m3/h,设计扬程hd=11.2 m,转速n=3 000 r/min。试验二为了得到空化状态下的数据,改变其试验参数,即水箱中的水位为45 cm,流量Qd=22.57 m3/h,设计扬程hd=11.2 m ,转速n=3 000 r/min条件下改变泵前阀门角度,即改变有效汽蚀余量,使流过离心泵体内压力而达到目的。
2.2 空化试验
方案一在离心水泵泵前阀门全开工况下进行试验,采样频率为1 000 Hz,流量为22.57 m3/h,试验参数如表1所示。

表1 方案一不同水位下试验(阀门全关)Tab.1 Test under different water levels (valve fully closed)
该试验选在额定转速下对水箱不同水位进行试验,计算不同水位下的空化余量。在离心水泵稳定运行后进行离心水泵振动数据采集,采集时间为300 s,因为在离心水泵需要经过一段时间才能够稳定运行。将得到的离心水泵振动的数据进行SPWVD变换处理后,得到频率为190.430、161.133、161.133、170.898 Hz,联合时频分布如图3所示。
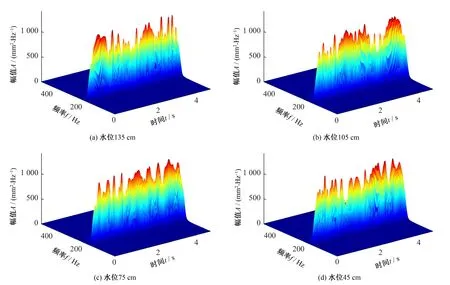
图3 不同水位下联合时频分布图(阀门全关)Fig.3 Joint time-frequency distribution under different water levels (valve fully closed)
方案二在离心水泵的工作范围内,考虑到离心泵转频,采样频率设为1 000 Hz,流量为23.89 m3/h 。对阀门不同开度的工况下进行试验,试验参数如表2所示。
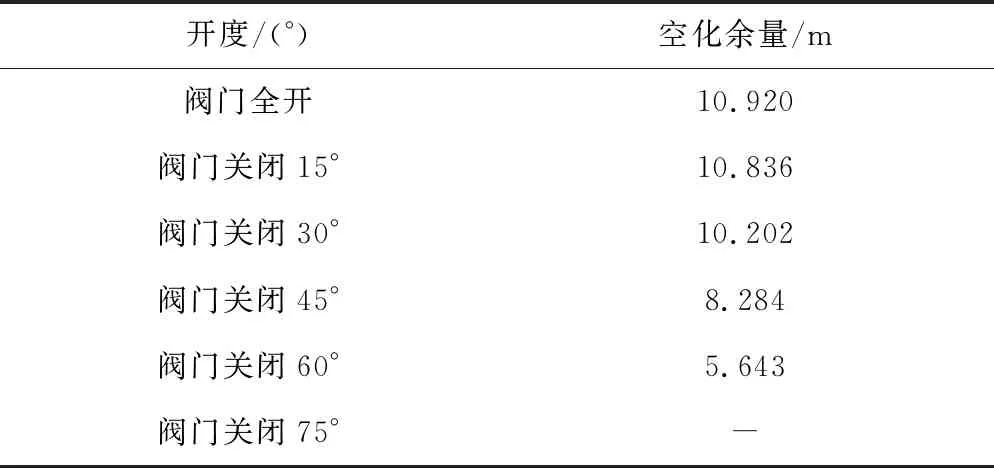
表2 方案二不同开度下试验(水箱水位45 cm)Tab.2 Test under different opening (water level of water tank 45 cm)
待离心水泵稳定运行后进行振动数据采集,计算不同开度下的空化余量。采集时间为300 s,随着空化程度逐渐增加,空化余量逐渐较小,试验为关闭75°时空化余量出现负值,推测原因是试验装置误差导致,能够听见明显的噪音。将采集的数据运用SPWVD变换进行处理,得到各种工况下的联合时频分布图,如图4所示。

图4 不同开度下联合时频分布图(水位45 cm)Fig.4 Joint time-frequency distribution diagram with different openings (water level of water tank 45 cm)
3 试验结果分析
图3联合时频分布图表示离心泵装置在转速3 000 r/min,分别在水位为135、105、75、45 cm工况下进行试验。在此水位逐渐降低情况下观察透明管的水体流动,透明管内不存在气泡。在此变化下,分别对所采集的数据进行SPWVD变换,几乎不存在其低频信号,得到振动频率信号分别为190.430、161.133、161.133、170.898 Hz左右。瀑布图如图5(a)所示,其具体数据如表3所示。
图4三维频域图表示离心泵装置在转速3 000 r/min下,水位高为45 cm工况下,在其他条件不变的情况下改变阀门的开度,逐步减弱空化程度,在阀门全开、关闭15°、关闭30°、关闭45°、关闭60°和关闭75°的工况下进行试验,通过观察透明管,在试验的初始阶段几乎不能够看到气泡的产生,而最后能够看到大量气泡。对所采集的数据进行SPWVD变换后,几乎不存在低频信号,得到振动频率信号分别为184.570、187.500、166.992、167.969、194.336和181.641 Hz左右。瀑布图如图5(b)所示,其具体数据如表4所示。
由图5(a)可以看出,在其余条件不变情况下仅改变水位,对采集的数据进行SPWVD进行变换,不存在低频信号,其振动频率信号主要集中在160~200 Hz之间,且致振频率随水位降低有逐渐有减小的趋势,最终稳定在某一固定范围。振动幅值由140 mm2/ Hz逐渐到80 mm2/ Hz。图5(b)可以得到,在其余条件不变情况阀门开度,对采集的数据进行SPWVD进行变换,不存在低频信号,其振动频率信号主要集中在160~200 Hz之间,且致振频率随阀门逐渐关闭呈现先减小后增加的趋势,最终稳定在某一固定范围,且幅值随阀门关闭呈现先减小后增加的趋势。在试验的起初阶段,空化数较大,液体充满整个管道,离心泵的振动能量较低;随着空化数逐渐减小,管道中出现大量的气泡,使得振动能量增大;随着空化数字继续减小,管道中几乎全为气泡,而离心泵振动能量又呈现减小的趋势。

图5 两次试验瀑布图Fig.5 Waterfall of two experiments
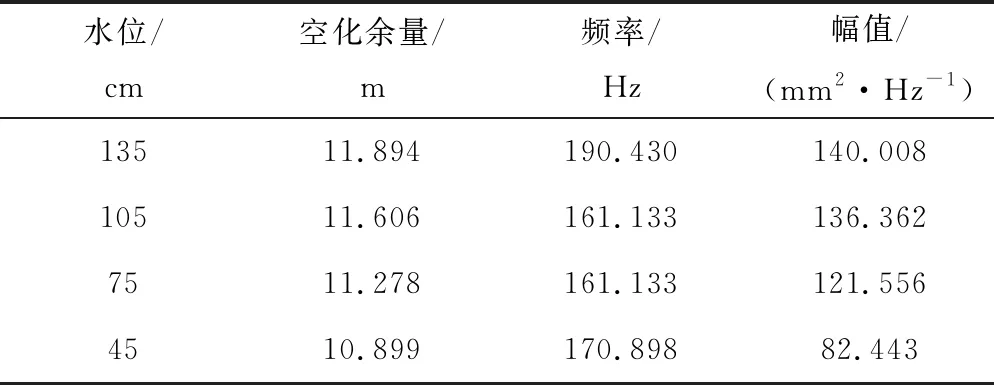
表3 不同水位下频率表(阀门全关)Tab.3 Frequency meter under different water levels (valve fully closed)

表4 不同阀门开度下频率表(水箱水位45 cm)Tab.4 Frequency table with different valve opening (water level of water tank 45 cm)
此外,图6表示阀门关闭60°时的气泡状态,图7表示阀门关闭45°时的状态。如图6和图7所示,空化程度强时,离心泵出口透明管中气泡体积比较大,空化程度比较弱时,离心泵出口透明管中气泡体积比较小,几乎很难观察到气泡。对比不同工况下空化频率变化及气泡部分情况可知,空化较弱时,气泡体积较小,气泡产生和溃灭频率较高,造成了水泵振动频率增加;当空化强度较高时,气泡体积较大,可以存在较长时间,溃灭频率相对较低,水泵振动频率也有所下降。

图6 空化较强时(关闭60°)Fig.6 When cavitation is strong (close 60°)
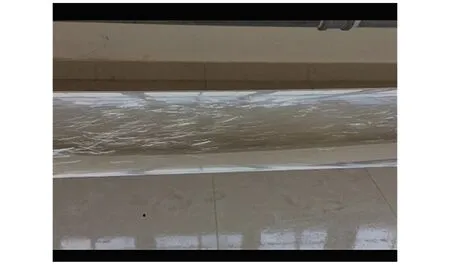
图7 空化较弱时(关闭45°)Fig.7 When cavitation is weak (close 45°)
4 结 语
本文针对测试空化信号,引入时频分析技术,利用平滑伪Wigner-Ville分布,通过SPWVD变换得到了不同水位下、开度下监测点的频域结果,实现了对离心泵空化性能的研究,具体结论如下:
(1)利用平滑伪Wigner-Ville分布,通过SPWVD变换可以有效地识别空化特征。
(2)离心水泵在定转速下空化致振频率随着水位的增加,空化致振频率主要集中在160~200 Hz,最终稳定在某一固定范围。
(3)离心水泵在定转速下空化致振频率随着空化程度的增加,且呈现出减小后增加的趋势,即随着空化程度逐渐减小时,机组的振动频率190 Hz左右减小到167 Hz左右,随着空化程度的增加,机组的振动频率又逐渐增加到194 Hz左右。
□
