磁暴监测系统相对测量组件设计与实现
2020-08-19贺永亮
贺永亮
(中电科仪器仪表(安徽)有限公司,安徽 蚌埠 233010)
0 引 言
磁暴是指太阳活动异常时,其抛射物质形成激波,当激波扫过地球时,磁层被突然压缩,造成地球磁场异常变化。磁暴是一种全球性的地磁现象,是全球同时发生的强烈地磁干扰。磁暴能对空间各类飞行器、无线电通信、输电网络、导航、制导以及高铁电气系统等造成巨大的破坏性[1]。由于不同磁暴的类型、持续时间和强度存在较大差异,因此需要在对相当长时期的各种数据积累、分析的基础上,采用系统辩识、人工神经网络等非线性数学方法进行磁暴建模机理研究[2]。磁暴监测系统通过对地磁总场和三分量变化的连续监测,识别出当前磁暴的级别并预测磁暴的发展趋势。地磁总场的测量可使用专门的绝对测量探头(OVERHAUSER)。三分量的测量(相对测量)范围较宽,且需要覆盖地球磁场测量范围,因此选用具有较高分辨率和较小体积且可测量直流和交变磁场的三分量磁通门作为相对测量组件的传感器。
1 原理基础
在铁芯上缠绕一对线圈,激励线圈和感应线圈。由法拉第电磁感应定律可知,感应线圈上将产生感应电势,据此可推导出变压器效应的数学模型。激励磁场强度的变化会引起铁心磁导率的变化,此时感应电势中就会出现随环境磁场强度而变的偶次谐波增量[3]。当铁芯工作在周期性过饱和状态时,感应的偶次谐波会明显增强,这就是相对测量组件工作的基本原理。
测量地磁场H、D、Z这3个分量的原理类似。图1是一个分量的测量原理。待测的磁场变化由传感器检测,经放大、解调后进行积分、滤波,得到与磁场大小成正比的直流电压信号。考虑到温度的变化会使测量结果产生飘移,增加了温度补偿功能。补偿后的电压信号由AD数字化后通过外部接口进行输出。
2 相对测量组件设计
2.1 磁通门传感器
磁芯是磁通门传感器的关键部件,其直径及厚度会对传感器的噪声性能产生影响,同时线圈匝数和单匝厚度与噪声和感应电压也存在密切关系[4]。磁通门传感器由环形磁芯、激励线圈和感应线圈组成。环形磁芯是在磁性很小的合金骨架上缠绕玻莫合金薄带,然后经高温退磁处理后形成,是传感器的敏感元件。为了提高传感器的信噪比,减小玻莫合金薄带的匝数、宽度。考虑到热胀冷缩的影响,骨架以及玻莫合金的热膨胀系数应尽量一致。
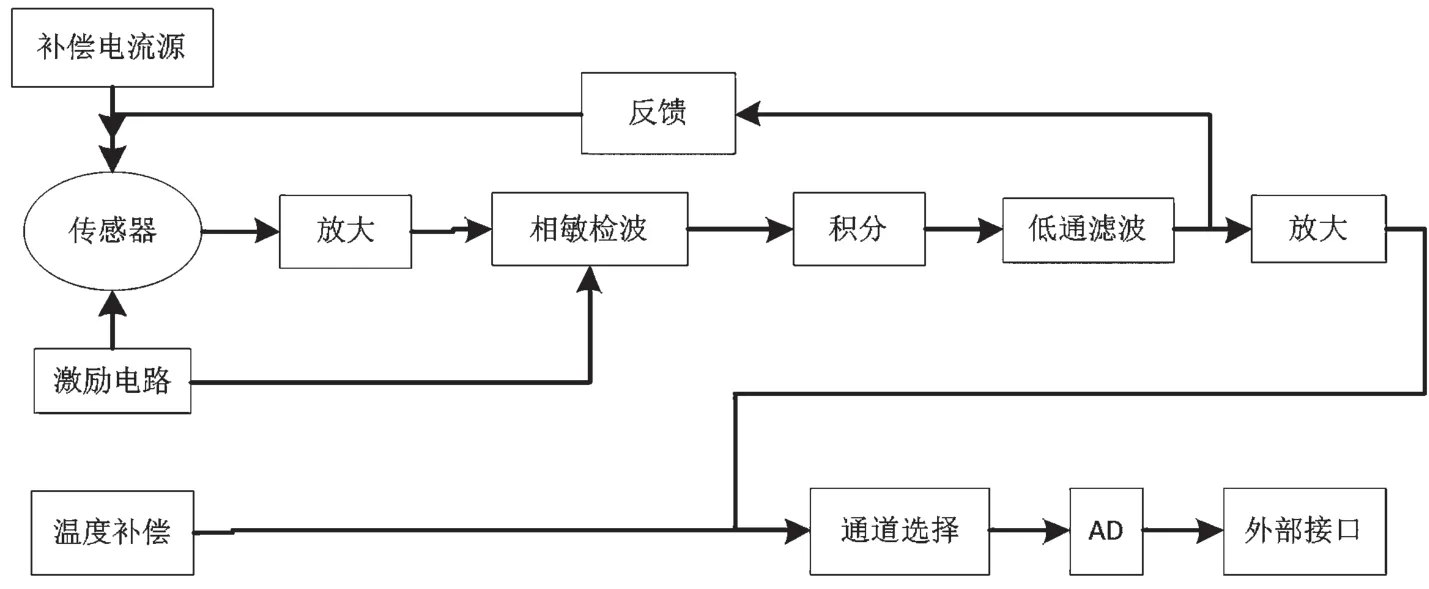
图1 相对测量组件原理
2.2 传感器噪声性能的验证
周围环境有磁场存在。为了测试传感器的噪声性能,需将传感器放置在零磁空间的标准线圈中,使传感器在零场下工作[5]。用短路电流的方法检测传感器输出的所有偶次谐波。通过对记录曲线的计算考察传感器的峰峰值噪声。测试样品的峰峰值噪声约为0.05 nT,能够满足需要的噪声指标。
2.3 地磁基本场补偿
地磁场H、Z分量的变化范围可达±65 knT,项目分辨率指标要求优于0.01 nT。为了不降低灵敏度,必须对H、Z分量进行补偿来抵消外磁场,使传感器工作在零场附近[6]。地磁基本场补偿是磁通门设计的一项关键技术。系统选用OVERHAUSER探头测量地磁基本场,并反馈到补偿电流源,对传感器进行补偿。相对测量组件探测经补偿后的地磁场变化,送主控单元进行处理。传感器检测模块采用两个通道,以消除因换档引起的误差。如果相对测量通道出现饱和,则说明补偿不够,会使相对测量通道偏离零场。这时应再次检测地磁基本场,重新对传感器进行补偿。
2.4 激磁电路设计
激磁电路对磁通门传感器的性能有很大影响,因此在设计时要给予特别的考虑。首先,频率稳定性。激磁电源频率的变化不仅引起磁通门探头灵敏度的变化,而且使探头信号频率偏离各滤波环节的中心频率,从而引起增益的变化。其次,电压幅值稳定性。激磁电源电压幅值的变化将导致探头激磁磁场强度幅值的变化,因而灵敏度将随之变化[7]。最后,波形稳定性。激励电源电压波形无论是正弦波、方波还是三角波,波形不稳定都将引起铁心饱和角发生变化。由磁通门探头数学模型可知,它会导致探头灵敏度发生变化。基于上述要求,为了得到一个稳定的、比较纯净的正弦波,使用晶体主振电源电路,并采用正弦波激磁。频率源由晶体振荡器和计数器组成。激磁频率的选择是很重要的一项工作,不仅关系铁芯达到饱和的难易,而且关系到铁损的大小。从计数器出来的信号还需经滤波处理,设计中采用的是带通滤波电路。一般情况下,用一阶滤波很难得到理想的波形,因此采用二阶带通有源滤波器。从滤波器出来的正弦信号不足以使激磁线圈达到饱和,因此还需经过功率放大。功率放大电路是激磁电源电路的关键组成部分。为防止输出包含直流成分,采用轨至轨运算放大器作为驱动级的推挽式互补型功率放大电路。为使激励线圈流过一波形较好的正弦波电压,引入了负反馈电路,同时该电路也起到稳定工作点、放大倍数和减小失真的作用。这样可在输出端获得一正弦信号,来驱动磁通门传感器的激励线圈。
3 测试结果与分析
磁暴监测系统相对测量组件是测试地磁场的变化。测试其性能时,不能受到外界磁场的干扰[8]。因此,磁暴监测系统相对测量组件的测试需在零磁空间环境下进行。所需的仪器设备主要包括零磁屏蔽装置、高精度恒流源、信号发生器以及六位半数字电压表等,测试框如图2所示。

图2 磁暴监测系统相对测量组件测试框图
3.1 噪声水平
噪声水平是反映相对测量组件在外磁场为零时探头本身的固有噪声。磁暴监测系统要求噪声水平小于0.1 nT(RMS)。
测试步骤如下:(1)按要求连接测试系统,打开系统电源;(2)标准线圈不加电流(此时零磁空间内部剩余磁场应小于20 nT);(3)连续读取100 s的秒数据,分成10组。
计算每一组数据的RMS值,再计算算术平均值,结果即噪声水平。测试数据及处理结果见表1。
从表1可以计算出RMS平均值即噪声水平为0.04 nT,满足磁暴监测系统项目要求的0.1 nT的要求。
3.2 非线性度
非线性度是相对测量组件探头对输入磁场响应的偏离程度。测试选取13个检定点,分别为0 nT、±400 nT、±800 nT、±1 200 nT、±1 600 nT、±2 000 nT、±2 400 nT。磁暴监测系统项目要求非线性度小于5‰。
测试步骤如下:
(1)按要求连接测试系统,打开主机电源;
(2)标准线圈通电,加约50 knT的磁场;
(3)调整探头的方向和所加磁场方向一致;
(4)按上述的检定点加标准磁场,记录探头的读数。
测试数据及处理结果见表2,所用标准线圈的常数K=152.364 7 nT/mA。
表2中,磁场单位均为nT,电流单位为mA。标准磁场是线圈常数和线圈电流的乘积;读数误差是探头读数减去标准磁场,再扣除零点误差。非线性度为读数误差/标准磁场×1 000‰。可以看出,在全部检定点,非线性度均优于5‰的要求。
4 结 论
根据磁通门传感器的工作原理,完成了磁暴监测系统相对测量组件的设计。按照二次谐波检测方法设计了相关的检测电路。为了缩小相对测量组件的尺寸,提高性能指标,给出了噪声与退磁系数的关系、感应电压与磁芯几何尺寸的关系以及磁芯匝数和单匝磁芯的厚度参数。设计完成后,在零磁空间实验室对其各项指标进行测试。测试结果表明,采用所提方法设计的磁暴监测系统相对测量组件完全能够满足项目要求。
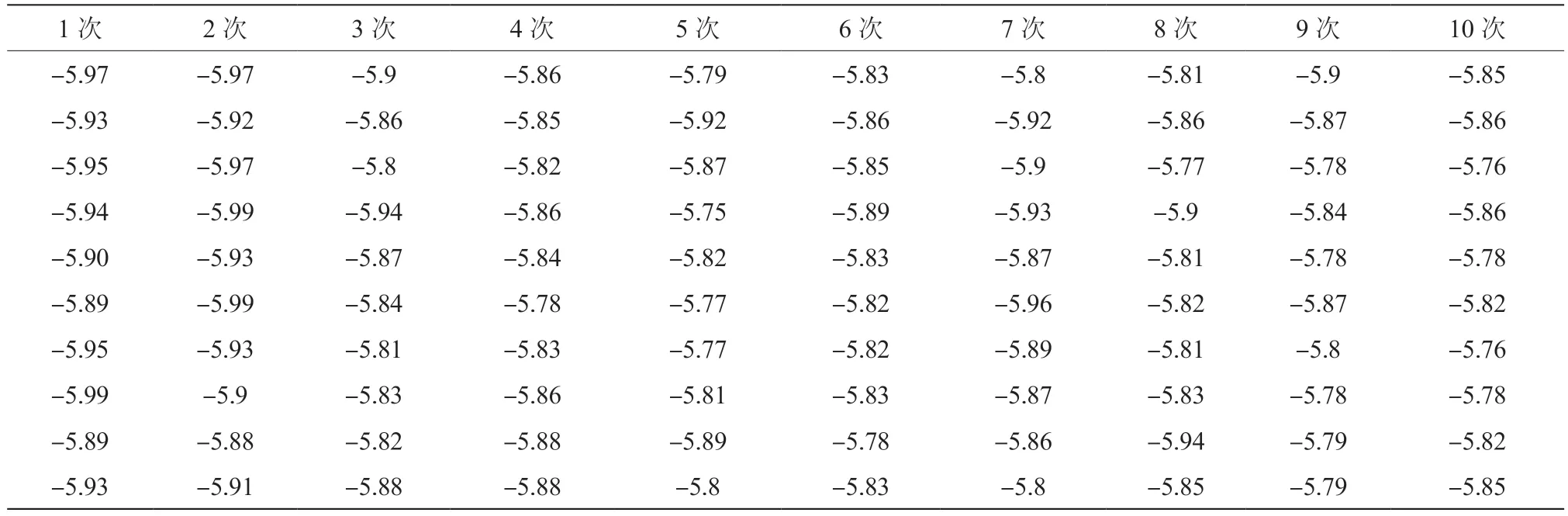
表1 噪声水平测试数据(单位:nT)
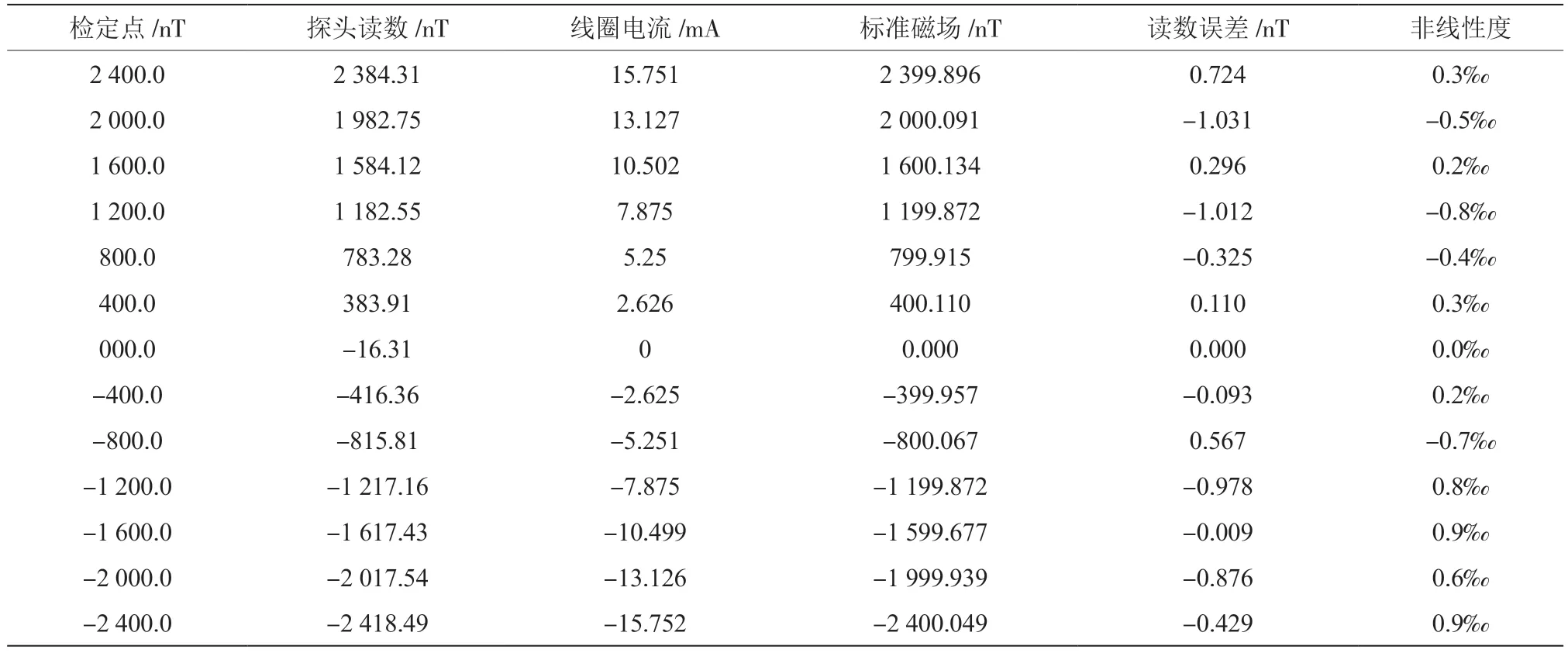
表2 非线性度测试数据
