基于额外测高的室内可见光通信三维定位算法
2020-08-17孔永灏梁玉坤赖荣光钟铸威吴现斌
孔永灏 梁玉坤 赖荣光 钟铸威 吴现斌
摘 要:以可见光通信为例,研究其应用于室内的三维定位算法。针对目前该领域定位算法存在泛用性較差、接收角模型对实际情况拟合不佳的问题,提出一种引入测高模块,并以二阶巴特沃斯滤波器作为接收模型的室内三维定位算法。并对测高精度进行了误差分析。仿真结果表明,基于该算法的室内三维定位在5.0 m×5.0 m×3.0 m的实验环境下平均误差为4.3 cm,可以解决室内三维定位不佳的问题。
关键词:可见光通信;室内三维定位;测高模块;二阶巴特沃斯模型
中图分类号:TN929.1 文献标识码:A 文章编号:2096-4706(2020)09-0054-05
3D Positioning Algorithm of Indoor Visible Light Communication
Based on Additional Height Measurement
KONG Yonghao,LIANG Yukun,LAI Rongguang,ZHONG Zhuwei,WU Xianbin
(College of Engineering,Shantou University,Shantou 515063,China)
Abstract:This paper takes visible light communication as an example to study its application in indoor 3D positioning algorithm. Aiming at the problems of poor universality and poor fitting of receiving angle model to the actual situation of the current positioning algorithm in this field,an indoor 3-dimensional positioning algorithm with height measurement module and second-order Butterworth filter as the receiving model is proposed. In addition,the error analysis of height measurement accuracy is made. The simulation results show that the average error of indoor 3D positioning based on this algorithm is 4.3 cm in the experimental environment of 5.0 m×5.0 m×3.0 m,which can solve the problem of poor indoor 3D positioning.
Keywords:visible light communication;indoor 3D positioning;height measurement module;second-order Butterworth model
0 引 言
随着依赖于数据多媒体业务的智慧城市建设的深入发展,人们对室内定位服务提出了要求。不同于卫星系统在室内效果不佳,传统无线通信面临设备部署成本高、无线电频谱资源稀缺问题的存在,基于可见光通信(Visible Light Communication)的室内定位凭借着其电磁性质优良、不占用频谱资源、部署成本低的特点,在住宅、商业中心,隧道等室内场景有着广阔的发展前景。
目前,在该领域的研究已取得了可观的进展。杨世权[1]等提出了利用照度测距圆重叠区重心估计的方法,岳宗杰[2]等提出基于FFT算法进行定位,董文杰[3]等提出了基于光强的定位算法。上述三种定位方案都取得了不错的定位效果,但均需基于高度固定的条件,无法适用于复杂多变的应用场景,泛用性较差。另一方面,基于接收角映射的定位算法效果较
差,其原因在于光信道传输模型中接收角模型对实际情况的拟合不佳。J.R.Barry[4]提出了理想角度接收模型,对光电二极管视场宽度内的白光LED采用单一接收角度计算,使定位效果产生了极大误差;胡晴晴[5]等提出朗伯体模型,对实际模型的总体拟合有了一定的提高,但对视场宽度内的拟合情况表现不佳,导致在三维定位中仍存在较大的定位误差问题。
针对上述问题,本文基于汕头大学工学院“利用STM32实现基于可见光的室内定位”的大学生创新项目研究成果,提出了以下两点创新:
(1)针对泛用性,采用超声波测距模块实时采集定位目标的高度,同时运用到达角(Angle-of-Arrival,AOA)定位算法在不同高度下进行室内三维定位。
(2)针对接收角拟合问题,提出一种基于二阶巴特沃斯滤波器的接收角模型,对实际模型的总体拟合误差减小到了0.4%。
仿真结果表明,本文提出的接收角模型在5.0 m×5.0 m×3.0 m的空间区域中最大相对误差约为13.0 cm,平均误差约为4.3 cm,在室内三维定位取得了可观进展。
最后,本文结构安排如下:第1部分介绍定位算法的相关原理,主要阐述在测得定位目标高度条件下基于二阶巴特沃斯接收角模型的定位系统。第2部分给出本文所采用的实验参数设置,并阐述室内布局、噪声引入,以及不同接收角模型对实际模型的拟合情况。第3部分展示本文实验结果并进行相关分析。第4部分全文内容进行总结。
1 定位算法
1.1 定位流程简介
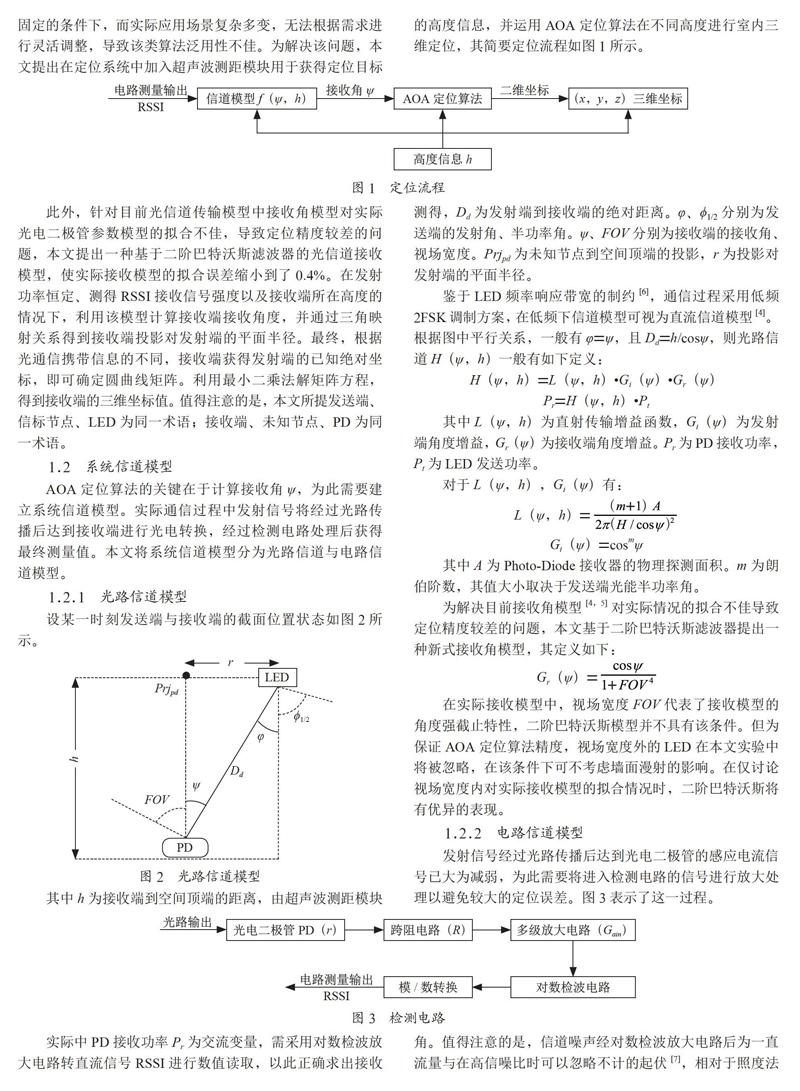
目前,多数基于可见光通信的室内定位算法建立在高度固定的条件下,而实际应用场景复杂多变,无法根据需求进行灵活调整,导致该类算法泛用性不佳。为解决该问题,本文提出在定位系统中加入超声波测距模块用于获得定位目标的高度信息,并运用AOA定位算法在不同高度进行室内三维定位,其简要定位流程如图1所示。
此外,针对目前光信道传输模型中接收角模型对实际光电二极管参数模型的拟合不佳,导致定位精度较差的问题,本文提出一种基于二阶巴特沃斯滤波器的光信道接收模型,使实际接收模型的拟合误差缩小到了0.4%。在发射功率恒定、测得RSSI接收信号强度以及接收端所在高度的情况下,利用该模型计算接收端接收角度,并通过三角映射关系得到接收端投影对发射端的平面半径。最终,根据光通信携带信息的不同,接收端获得发射端的已知绝对坐标,即可确定圆曲线矩阵。利用最小二乘法解矩阵方程,得到接收端的三维坐标值。值得注意的是,本文所提发送端、信标节点、LED为同一术语;接收端、未知节点、PD为同一术語。
1.2 系统信道模型
AOA定位算法的关键在于计算接收角ψ,为此需要建立系统信道模型。实际通信过程中发射信号将经过光路传播后达到接收端进行光电转换,经过检测电路处理后获得最终测量值。本文将系统信道模型分为光路信道与电路信道模型。
1.2.1 光路信道模型
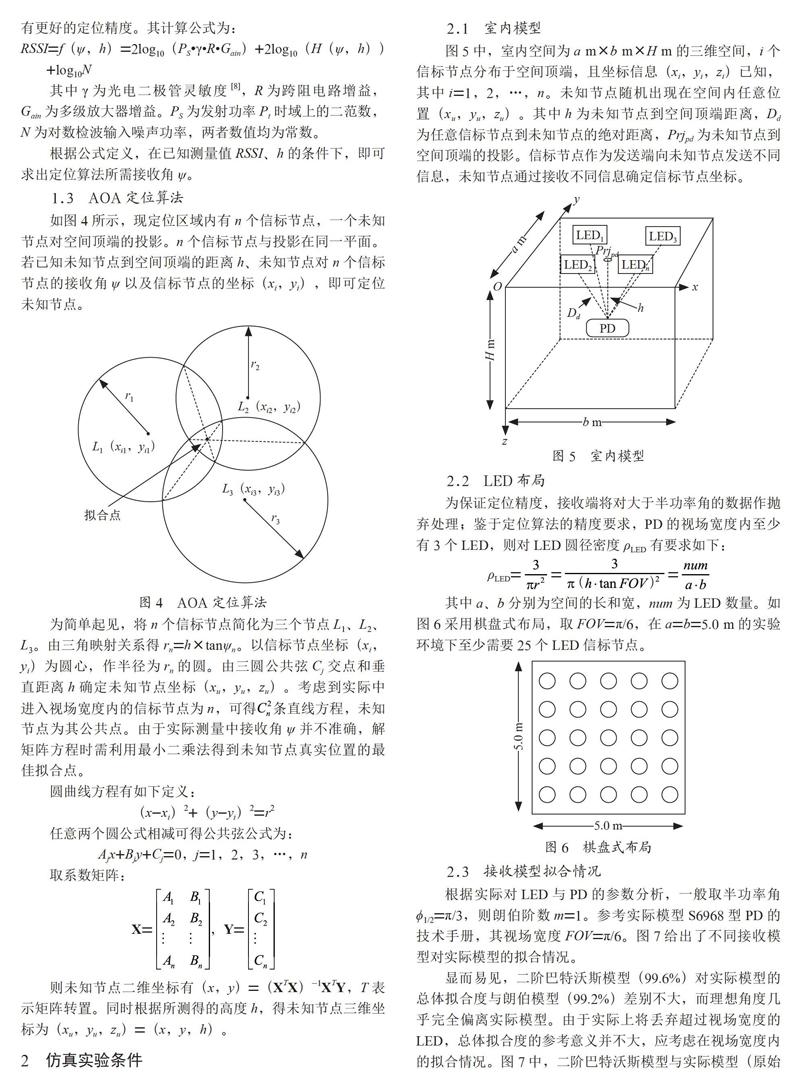
设某一时刻发送端与接收端的截面位置状态如图2所示。
其中h为接收端到空间顶端的距离,由超声波测距模块测得,Dd为发射端到接收端的绝对距离。φ、?1/2分别为发送端的发射角、半功率角。ψ、FOV分别为接收端的接收角、视场宽度。Prjpd为未知节点到空间顶端的投影,r为投影对发射端的平面半径。
鉴于LED频率响应带宽的制约[6],通信过程采用低频2FSK调制方案,在低频下信道模型可视为直流信道模型[4]。根据图中平行关系,一般有φ=ψ,且Dd=h/cosψ,则光路信道H(ψ,h)一般有如下定义:
其中L(ψ,h)为直射传输增益函数,Gi(ψ)为发射端角度增益,Gr(ψ)为接收端角度增益。Pr为PD接收功率,Pt为LED发送功率。
其中A为Photo-Diode接收器的物理探测面积。m为朗伯阶数,其值大小取决于发送端光能半功率角。
为解决目前接收角模型[4,5]对实际情况的拟合不佳导致定位精度较差的问题,本文基于二阶巴特沃斯滤波器提出一种新式接收角模型,其定义如下:
Gr(ψ)=
在实际接收模型中,视场宽度FOV代表了接收模型的角度强截止特性,二阶巴特沃斯模型并不具有该条件。但为保证AOA定位算法精度,视场宽度外的LED在本文实验中将被忽略,在该条件下可不考虑墙面漫射的影响。在仅讨论视场宽度内对实际接收模型的拟合情况时,二阶巴特沃斯将有优异的表现。
1.2.2 电路信道模型
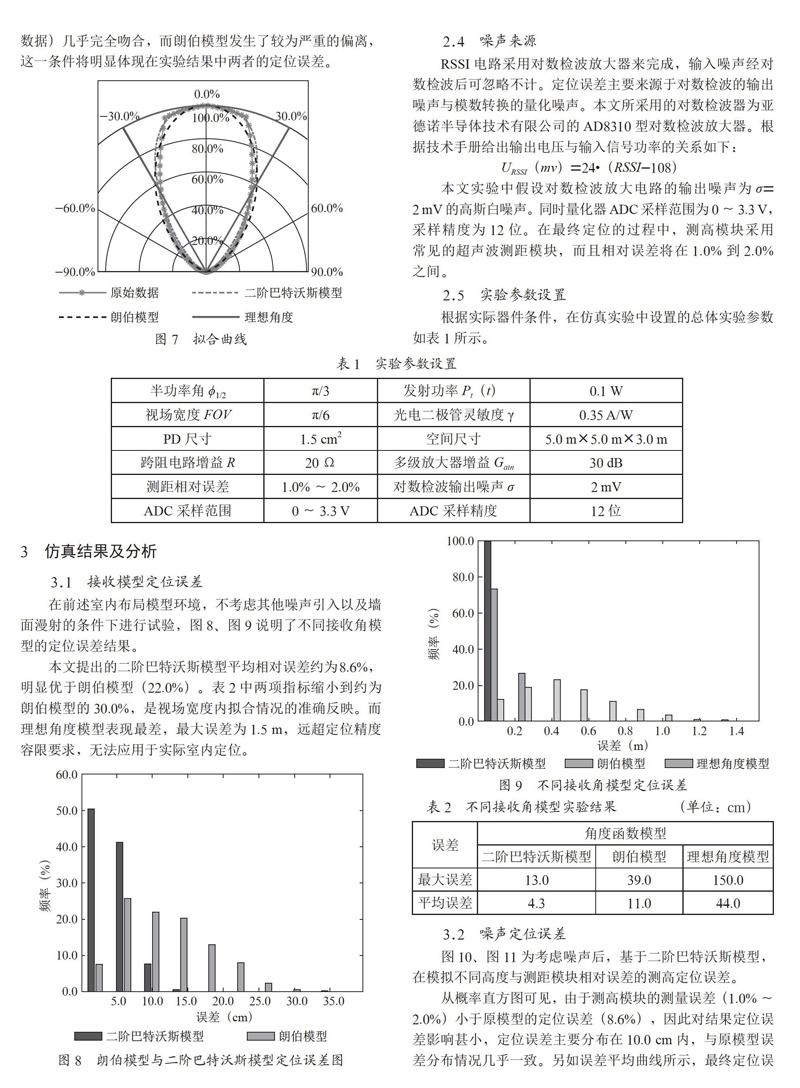
发射信号经过光路传播后达到光电二极管的感应电流信号已大为减弱,为此需要将进入检测电路的信号进行放大处理以避免较大的定位误差。图3表示了这一过程。
实际中PD接收功率Pr为交流变量,需采用对数检波放大电路转直流信号RSSI进行数值读取,以此正确求出接收角。值得注意的是,信道噪声经对数检波放大电路后为一直流量与在高信噪比时可以忽略不计的起伏[7],相对于照度法有更好的定位精度。其计算公式为:
其中γ为光电二极管灵敏度[8],R为跨阻电路增益,Gain为多级放大器增益。PS为发射功率Pt时域上的二范数,N为对数检波输入噪声功率,两者数值均为常数。
根据公式定义,在已知测量值RSSI、h的条件下,即可求出定位算法所需接收角ψ。
1.3 AOA定位算法
如图4所示,现定位区域内有n个信标节点,一个未知节点对空间顶端的投影。n个信标节点与投影在同一平面。若已知未知节点到空间顶端的距离h、未知节点对n个信标节点的接收角ψ以及信标节点的坐标(xi,yi),即可定位未知节点。
为简单起见,将n个信标节点简化为三个节点L1、L2、L3。由三角映射关系得rn=h×tanψn。以信标节点坐标(xi,yi)为圆心,作半径为rn的圆。由三圆公共弦Cj交点和垂直距离h确定未知节点坐标(xu,yu,zu)。考虑到实际中进入视场宽度内的信标节点为n,可得 条直线方程,未知节点为其公共点。由于实际测量中接收角ψ并不准确,解矩阵方程时需利用最小二乘法得到未知节点真实位置的最佳拟合点。
圆曲线方程有如下定义:
任意两个圆公式相减可得公共弦公式为:
取系数矩阵:
则未知节点二维坐标有(x,y)=(XTX)-1XTY,T表示矩阵转置。同时根据所测得的高度h,得未知节点三维坐标为(xu,yu,zu)=(x,y,h)。
2 仿真实验条件
2.1 室内模型
图5中,室内空间为a m×b m×H m的三维空间,i个信标节点分布于空间顶端,且坐标信息(xi,yi,zi)已知,其中i=1,2,…,n。未知节点随机出现在空间内任意位置(xu,yu,zu)。其中h为未知节点到空间顶端距离,Dd为任意信标节点到未知节点的绝对距离,Prjpd为未知节点到空间顶端的投影。信标节点作为发送端向未知节点发送不同信息,未知节点通过接收不同信息确定信标节点坐标。
2.2 LED布局
为保证定位精度,接收端将对大于半功率角的数据作抛弃处理;鉴于定位算法的精度要求,PD的视场宽度内至少有3个LED,则对LED圆径密度ρLED有要求如下:
ρLED===
其中a、b分别为空间的长和宽,num为LED数量。如图6采用棋盘式布局,取FOV=π/6,在a=b=5.0 m的实验环境下至少需要25个LED信标节点。
2.3 接收模型拟合情况
根据实际对LED与PD的参数分析,一般取半功率角?1/2=π/3,则朗伯阶数m=1。参考实际模型S6968型PD的技术手册,其视场宽度FOV=π/6。图7给出了不同接收模型对实际模型的拟合情况。
显而易见,二阶巴特沃斯模型(99.6%)对实际模型的总体拟合度与朗伯模型(99.2%)差别不大,而理想角度几乎完全偏离实际模型。由于实际上将丢弃超过视场宽度的LED,总体拟合度的参考意义并不大,应考虑在视场宽度内的拟合情况。图7中,二阶巴特沃斯模型与实际模型(原始数据)几乎完全吻合,而朗伯模型发生了较为严重的偏离,这一条件将明显体现在实验结果中两者的定位误差。
2.4 噪声来源
RSSI电路采用对数检波放大器来完成,输入噪声经对数检波后可忽略不计。定位误差主要来源于对数检波的输出噪声与模数转换的量化噪声。本文所采用的对数检波器为亚德诺半导体技术有限公司的AD8310型对数检波放大器。根据技术手册给出输出电压与输入信号功率的关系如下:
URSSI(mv)=24·(RSSI-108)
本文实验中假设对数检波放大电路的输出噪声为σ= 2 mV的高斯白噪声。同时量化器ADC采样范围为0~3.3 V,
采样精度为12位。在最终定位的过程中,测高模块采用常见的超声波测距模块,而且相对误差将在1.0%到2.0%之间。
2.5 实验参数设置
根据实际器件条件,在仿真实验中设置的总体实验参数如表1所示。
3 仿真结果及分析
3.1 接收模型定位误差
在前述室内布局模型环境,不考虑其他噪声引入以及墙面漫射的条件下进行试验,图8、图9说明了不同接收角模型的定位误差结果。
本文提出的二阶巴特沃斯模型平均相对误差约为8.6%,明显优于朗伯模型(22.0%)。表2中两项指标缩小到约为朗伯模型的30.0%,是视场宽度内拟合情况的准确反映。而理想角度模型表现最差,最大误差为1.5 m,远超定位精度容限要求,无法应用于实际室内定位。
3.2 噪声定位误差
图10、图11为考虑噪声后,基于二阶巴特沃斯模型,在模拟不同高度与测距模块相对误差的测高定位误差。
从概率直方图可见,由于测高模块的测量误差(1.0%~ 2.0%)小于原模型的定位误差(8.6%),因此对结果定位误差影响甚小,定位误差主要分布在10.0 cm内,与原模型误差分布情况几乎一致。另如误差平均曲线所示,最终定位误差与高度呈非线性正相关。
4 结 论
本文提出了引入测高模块,且基于二阶巴特沃斯滤波接收角模型的室内三维定位算法。在仿真结果中,基于该模型的室内三维定位平均误差为4.3 cm,明显优于朗伯接收角模型与理想角度模型,不仅提高了目前定位算法对复杂场景泛用性,而且解决了室内三维定位精度不佳的难题。
参考文献:
[1] 杨世权,张谦述,胡玥,等.利用照度测距圆重叠区重心估计的可见光室内定位方法研究 [J].光学技术,2019,45(5):557-561.
[2] 岳宗杰,叶佳林,王娜,等.基于FFT的可见光通信室内定位系统的设计 [J].光通信研究,2019(6):58-62.
[3] 董文杰,王旭东,吴楠,等.基于LED光强的室内可见光定位系统的实现 [J].光通信技术,2017,41(3):12-15.
[4] KAHN J M,BARRY J R. Wireless infrared communications [J].Proceedings of the IEEE,1997,85(2):265-298.
[5] 胡晴晴.基于LED可见光的室內定位算法研究 [D].大连:大连海事大学,2016.
[6] 董岳.可见光通信中收发端技术的研究与实现 [D].成都:电子科技大学,2018.
[7] 黄香馥.关于信号和噪声通过对数检波器的某些关系 [J].成都电讯工程学院学报,1962(2):39-48.
[8] KOMINE T,NAKAGAWA M. Fundamental analysis for visible-light communication system using LED lights [J].IEEE Transactions on Consumer Electronics,2004,50(1):100-107.
作者简介:孔永灏(1999—),男,汉族,广东广州人,本科在读,研究方向:电子信息工程。
