涂胶机器人3D胶枪的预见性维护方法
2020-08-13张宁徐剑
张宁 徐剑
摘 要:文章介绍了杜尔打胶机器人中最新一代3D胶枪EcoGun2 3D结构和功能,针对EcoGun2 3D在现场应用时出现的主要故障问题,分析了产生原因。最后通过对电机扭矩和温度进行定期实时监控的预见性维护方法替代了传统的计划维修,降低了停机时间和生产制造成本。
关键词:3D胶枪;预见性维护;机器人
中图分类号:U466 文献标识码:B 文章编号:1671-7988(2020)14-140-03
Abstract: Introduction to the structure and function of the latest version of 3D Eco Gun 2, focusing on main faults occurring onsite during production, analyzing the root cause. Finally, the predictive maintenance method of regular real-time monitoring of the motor torque and temperature replaces the traditional planned maintenance and reduces the downtime and manufacturing costs.
Keywords: 3D gule gun; predictive maintenance; Robot
CLC NO.: U466 Document Code: B Article ID: 1671-7988(2020)14-140-03
前言
随着机器人喷涂技术的进步和智能化,对车身涂胶质量的要求不断提高以及人力成本的提升,机器人在汽车涂装车间得到了广泛的应用,其中涂胶工序也逐步开始大量使用机器人。吉利汽车临海涂装车间双线共16台涂胶机器人,主要应用在UBS(焊缝涂胶)、UBC(底部减震胶)工位,其中3D胶枪的应用包括了德国杜尔老一代的产品和最新一代EcoGun2 3D。EcoGun2 3D相比老一代产品,一种型号就实现从隔音阻尼垫喷涂到焊缝密封的所有应用领域,并且在压缩空气消耗、涂胶质量等方面均有所改善,但是结构更加精密、维护保养难度更高。因此针对3D胶枪结构进行分析研究,根据其机械和电气特性对经常出现的故障进行提前预判和优化改进,从而达到降低打胶机器人的整体故障率和节约成本的目的。
1 3D胶槍功能与结构介绍
3D胶枪作为涂胶机器人的重要组成部分,是一种喷涂装置,主要搭配机器人本体用于向汽车车身上喷涂高粘度膏状材料。例如PVC塑料溶胶或丙烯酸脂。
主要工作方式为:机器人将喷涂器定位至喷涂位置,喷涂材料通过3D胶枪输送至顶部的各个喷嘴,按照要喷涂表面的尺寸、状况或机器人对表面的可达性,选择合适角度的喷嘴,然后相应的主针打开,材料进行喷涂;当无材料进行喷涂时,主针关闭,回流阀打开,材料进行回流。
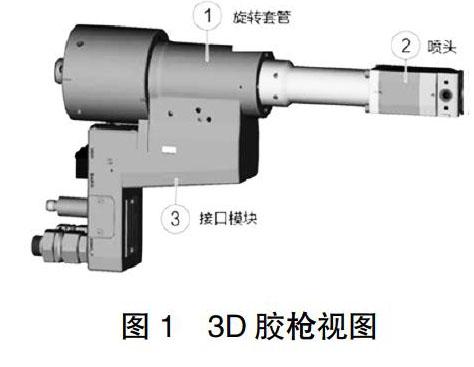
3D胶枪的主要结构包括旋转套管、喷头和接口模块,如图1所示。旋转套管包括一个旋转部件和一个固定部件,旋转部件安装在机器人法兰上,由机器人驱动电机带动旋转,保证旋转部件沿轴向做旋转运动。在接口模块上连接有全部电气、气动组件和材料供应装置,其中包括电磁阀连接口、温度和压力传感器接口、材料供应接口、材料回流接口、触发空气连接口、固定块等。在存在材料回流的3D胶枪上,在接口模块处安装有回流阀。在不带材料回流的3D胶枪上,可通过供回路两个接口,连接两种材料。材料流经接口模块进入轴,之后流经法兰管至喷头,喷头的喷嘴通过主针来控制打开或关闭。
喷头由法兰外壳和喷嘴支座组成 。三个喷嘴按照0°、45°和 90°三个喷涂角度安装在喷嘴支座上。喷头经由法兰管与旋转套管相连接。
2 主要故障案例分析
Eco Gun2 3D作为杜尔公司最新一代3D胶枪,在使用过程中会出现一些新的故障,没有任何历史数据可以参照,存在故障点判断不准确、处理时间长等问题,在生产初期对设备开动率造成了一定的影响。主要故障有主针卡滞断裂导致的出胶异常、3D胶枪导致驱动电机超差报警、胶枪固定块脱落导致信号异常等。其中3D胶枪导致的驱动电机超差报警大约占总故障时间的70%,因此本文着重对该故障进行展开说明。
2.1 故障现象
驱动电机超差报警故障在初期体现为生产线开线时机器人在某个喷涂姿态时控制驱动电机运行的伺服驱动器报超差(F2028),也就是实际运行时扭矩值超过了两极扭矩极限值,报警可复位。机器人在喷涂几台车身后不再报警,故障只在长期停线后的初次开机时出现。机器人再经过一段时间生产运行后,会慢慢变化成频繁报警并且无法复位,机器人故障停机,只能通过更换3D胶枪或临时调整极限值来恢复生产。
2.2 故障原因
发生该故障后对3D胶枪进行拆解分析,主要原因有以下两点:
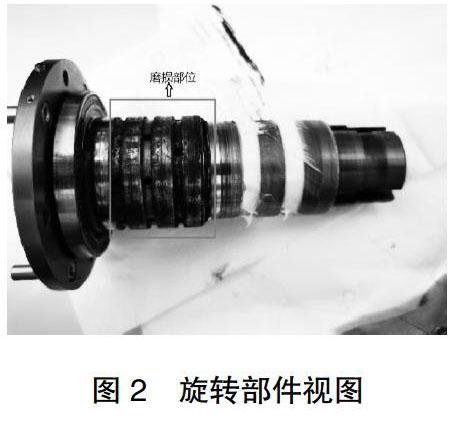
(1)图2所示,旋转部件中的密封件与固定部件接触位置存在磨损,产生大量凝固的磨损物。磨损物会随着运行时间而增加,在旋转套管内堆积。固化后造成负载端胶枪旋转阻力提升,电机运行扭矩和温度不断升高。
(2)旋转部件两端固定的滚珠轴承存在损伤,导致旋转部件旋转过程中出现偏心现象。
3 预见性维护方法
德国杜尔建议的维护方法为定期的预防性维护,也称计划维修,在机器人运行一段时间后,对3D胶枪进行拆解、检查、更换零部件。其中不同零部件的更换周期不一样,比如密封套件更换周期为6个月,主针更换周期为2年。在这种维护方式下,无论有无故障都需进行拆解,维护工作存在很大的盲目性,有可能过剩维修,导致人力和备件成本的浪费。因为3D胶枪结构复杂,甚至会出现损害性的保养活动,降低原有的设备精度。
3D胶枪最常见的故障为旋转套管导致的驱动电机过扭矩、运行温度升高。因此找到合适的方式对状态进行实时监控,通过对扭矩和电机温度的变化趋势进行研究分析,可以提前对旋转套管使用寿命进行判断,从而实现预见性维护的目的。
现场通过力士乐的Indra Works软件对8台机器人的胶枪驱动电机状态进行实时监控,针对性的采集数据进行对比分析。对比发现,当负载端3D胶枪状态下降,体现出来的主要数据变化为扭矩和电机温度的上升。
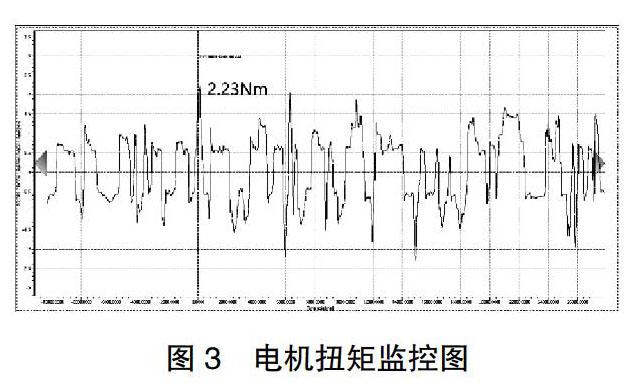
2019年11月4日在UBS站R22机器人上安装全新的3D胶枪进行数据持续监测对比。首次安装后第1个车型喷涂周期的扭矩峰值为2.23 Nm,如图3所示。在连续喷涂49982台车身后测量峰值达到3.60Nm,超过报警限值3.51Nm。通过对胶枪进行更换密封件和轴承,保养后的3D胶枪安装上去初次测量,扭矩峰值为2.40Nm。
选用UBC_R11和UBS_R22两个处于不同站的机器人进行数据采集,采集周期为1个月/次,发现影响3D胶枪寿命的主要因素为喷涂轨迹的复杂程度和喷涂车身数量。随著喷涂车身数量的增加,扭矩呈上升趋势。但是在喷涂同样数量的车身后,因为UBC站机器人轨迹相比于UBS站机器人较为简单,所以扭矩和温度的上升趋势慢很多,3D胶枪的使用寿命也就会延长。
通过以上分析,说明通过软件监控电机扭矩和温度能够推测出3D胶枪的当前使用状态,并分析和判断劣化趋势。为了使该预见性维护方法能够在现场有效实施,制定了以下几点措施:(1)每周对所有机器人的所有车型均进行扭矩和温度测量,测量后对峰值数据进行统计并存档。(2)对数据超过警戒范围的机器人制定维护计划,在停产期间进行更换。胶枪每次更换后需重新对数据进行测量,保证保养的有效性。(3)建立3D胶枪履历表,记录备件更换情况和更换前后状态。(4)根据数据分析,提前申购相关保养备件。
4 结语
喷涂机器人设备故障率占涂装车间整体设备故障率较大比重。未来喷涂机器人的维护模式必定是从现在的定期保养、事后维修的传统维护方法逐步转变为预见性维护。通过预见性维护方法,收集、分析和判断机器人劣化趋势、故障部位、原因并预测其变化,在故障发生之前就采取措施,预防和控制潜在故障的出现。
本文通过现场维护经验分析,使用预见性维护方法彻底解决了3D胶枪旋转部件导致的意外故障停线,有效提高了设备稳定性。通过数据分析进行保养更换和申购备件,降低了整体备件使用成本和库存压力。
