基于单片机的智能清洁机器人的设计
2020-08-13杜春明于桂君刘佳宁张思宇
杜春明 于桂君 刘佳宁 张思宇
(辽宁科技学院电信学院,辽宁 本溪117004)
1 概述
伴随社会的逐渐发展,人们越来越追求更加舒适的居家生活,但繁重的日常清洁,又成为了人们非常困扰的问题。智能清洁机器人的出现无疑可以有效解决这个难题,逐渐地替代常规手动清扫工具[1]。智能清洁机器人是一个具有自动控制的家用清扫工具,较适合于家庭居住面积比较大的居家环境,可以有效的减少人们劳动清扫时间,提高清扫效率。本文将介绍一款基于AT89C52 单片机的清洁机器人的软硬件设计。
2 系统总体设计
本设计是基于AT89C52 单片机芯片作为核心,采用四节1.5V 的电池为系统供电。采用红外遥控装置,通过按键控制智能清洁机器人的各种转向。采用红外线传感器装于车的左右两端实现避障功能;采用红外对管,装于车底盘的两侧,实现黑线循迹功能。利用双直流减速电机进行驱动,并配有单个万向轮安装于后方中下端,方便进行任何方向的驱动。采用L298N 电机驱动芯片驱动直流电机,并运用PWM脉冲宽度调制技术对电机的转速进行控制。采用LED 数码管进行模式显示。清洁模块主要采用单个吸尘器电机进行路面清洁,通过吸尘器电机的风机叶轮旋转吸起尘土,经过吸口吸入带有过滤网的集尘盒内。系统总体框图如图1 所示。
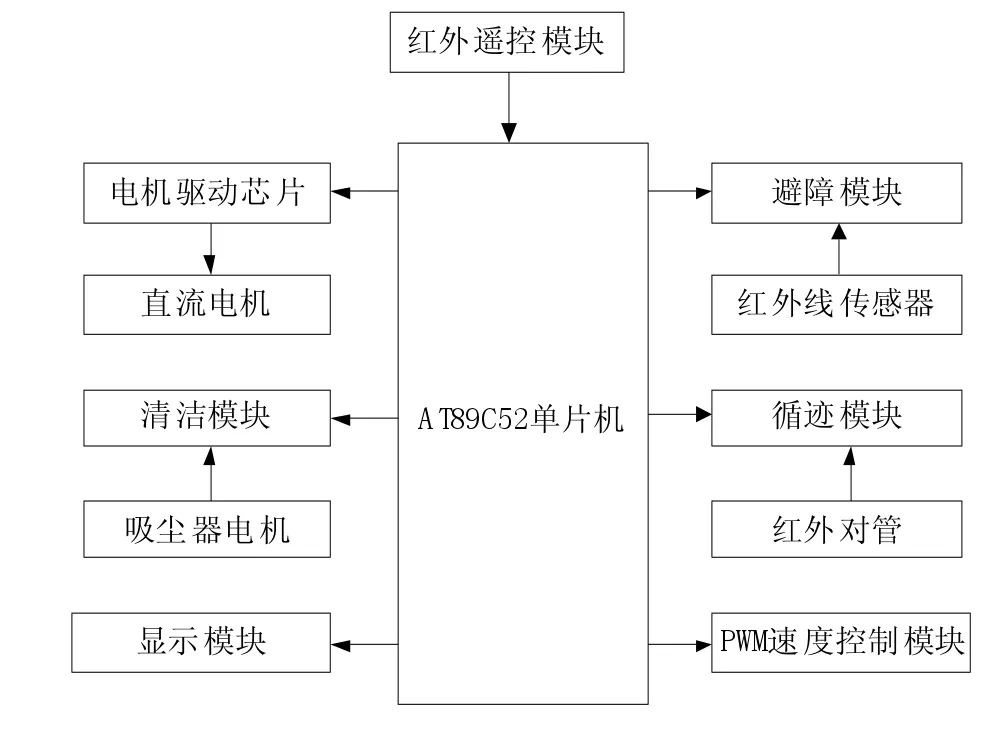
图1 系统总体框图
3 系统硬件设计
3.1 单片机最小应用系统
AT89C52 单片机的最小系统,主要由时钟电路和复位电路组成。电容C11 和电阻R1 构成上电复位电路,电容C11 可滤除高频干扰,防止单片机误复位;添加按键构成手动复位电路。单片机复位需在RST 引脚输入至少持续两个机器周期(24 个振荡周期)以上的高电平[2]。EA 引脚接高电平。如图2 所示。
3.2 电源电路
采用四节1.5V 的电池作为整个系统的供电电源。因为各类传感器模块、AT89C52 单片机芯片和一位共阳极LED 数码管的工作电压为5V,L298N 电机驱动芯片的电机驱动控制的电源输入端VS 和吸尘器电机的工作电压为12V,所以输入电压VCC(6V)须要经过三端稳压集成电路7805 和7812 分别降压到5V和升压到12V 才能为整个系统供电。电路如图3 所示。
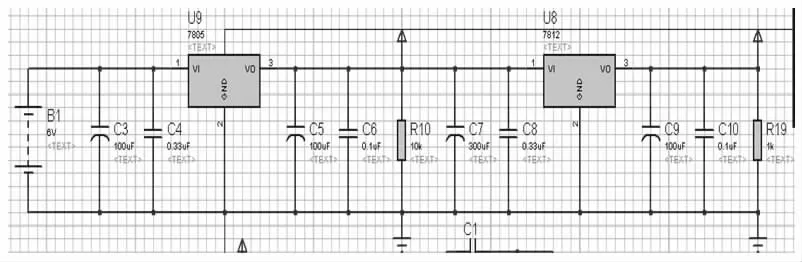
图3 电源电路设计图
3.3 避障电路
避障系统主要采用红外避障传感器模块。此模块具有一双红外线发射与接收管,当发射管发射出一定频率的红外线,探测到前方的阻碍时,红外线遇到阻碍会反射回来并被红外接收管接收,再经LM393 比较器处理之后,此时信号输出接口会持续输出一个低电平信号[3]。如图4 所示。
3.4 循迹电路
采用RPR220 反射型光电传感器模块,将传感器安装于模块的左右两侧。单个传感器主要由红外光电二极管和光电三极管组成,利用红外光探测,是一种红外反射式光电开关。
红外光线对黑、白的反射系数不同。当发射管在行驶过程中不断地向地面发射红外信号,红外光线照射到黑线会吸收(光电三极管截止),亦或照射到白线则反射(光电三极管导通),经过LM393 处理之后,分别输出相应信号(1 或者0),再经过74LS14 施密特触发器整形,输出结果,对路况进行随时校正[4]。
3.5 驱动与调速电路
驱动电路模块主要采用L298N 电机驱动芯片,使用时可以平稳有效的同时驱动双直流电机,能够控制双直流电机的正、反转,并进行速度控制,以此控制智能清洁机器人的转向及转速。如图5 所示。
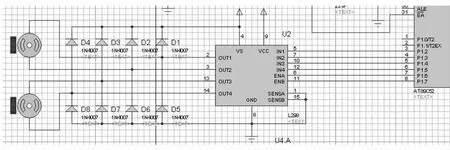
图5 驱动与调速电路设计图
D1~D8 为八个1N4007 整流二极管,用于保护L298N 电机驱动芯片。依靠ENA、ENB 两个引脚(高电平有效),并采用PWM脉冲宽度调制技术进行速度控制。运用定频调宽的方法,通过改变一个周期内单片机的I/O 口输出高电平和低电平的时间,改变占空比,实现对智能清洁机器人的调速控制。
3.6 显示电路
采用一位共阳极LED 数码管进行循迹、避障、遥控三种模式的显示。RP1 为上拉电阻,其主要作用是对流入LED 数码管中的模糊信号,运用电路钳位于“1”,并且也能起到限流的作用。
3.7 清洁电路
清洁电路模块主要采用外部吸尘硬件,通过吸尘器电机中的风机叶轮旋转,使吸尘室与外界空间之间形成气压差,达到吸尘清洁的目的。整个清洁过程主要包括起尘,吸尘,滤尘,三部分。
4 系统软件设计
本次智能清洁机器人系统一共设计了循迹、避障和遥控模式三种运行模式。通过按键进行三种模式的相互切换,并在一位LED 数码管上显示对应的模式,显示“1”时,此时模式为循迹模式;显示“2”时,此时模式为避障模式;显示“3”时,此时模式为遥控模式,三种模式处于各自模式时,实现的功能相互独立。系统主程序流程图如图6 所示。
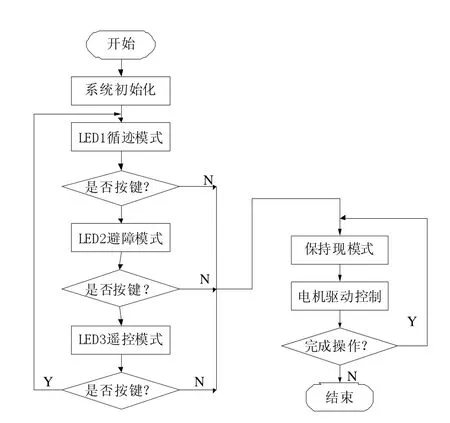
图6 主系统程序流程图
5 实物避障调试
当安装于左、右两侧的传感器均未探测到阻碍时,安装在模块上的探测提示灯不会亮起,提示未探测到障碍物。当安装于右侧的传感器探测到阻碍时,安装在右侧模块上的探测提示灯会亮起,提示探测到障碍物,左侧亦然。
6 结论
本设计利用单片机和传感器等外围设备,实现了清洁机器人的设计,具有自动循迹、避障和吸尘的功能。通过实验,验证了方案的可行性,具有一定的推广价值。
