苹果自动采摘机探讨
2020-08-12王勇王箫扬杨延宁王旭刘叶周旭朱鹏
王勇 王箫扬 杨延宁 王旭 刘叶 周旭 朱鹏


摘 要 在苹果采收过程中,使用苹果自动采摘机可有效降低苹果采摘过程中的劳动力投入。基于此,从系统设计(包括自动采摘原理、识别定位模块)、控制模块(包括电机驱动模块、舵机驱动模块)等方面分析一种具有自动完成苹果采摘等任务的智能机械系统。
关键词 苹果自动采摘机;系统设计;控制模块
中图分类号:S225 文献标志码:B DOI:10.19415/j.cnki.1673-890x.2020.15.081
随着科技的不断发展,苹果自动采摘机的研究成为当前的热点[1-2]。苹果自动采摘机在一定程度上可以节省劳动力、缩短劳动时间、提高生产效率,促进苹果产业的发展[3-4]。
因此,研究苹果自动采摘机对水果产业具有深远意义。
苹果自动采摘机主要包括三大部分:机械采摘手、整体电路驱动、苹果装箱装置。装置中伸缩杆可达到采摘的任意高度,机械爪可以模拟人手进行采摘。电路控制方面,以STM32F7单片机为主控,采用红外测距技术和图像识别技术准确快速识别苹果,利用电动机的正反转和单片机控制原理控制伸缩杆的高度以及机械爪的张合,实现准确摘取苹果。
1 系统设计
1.1 自动采摘原理
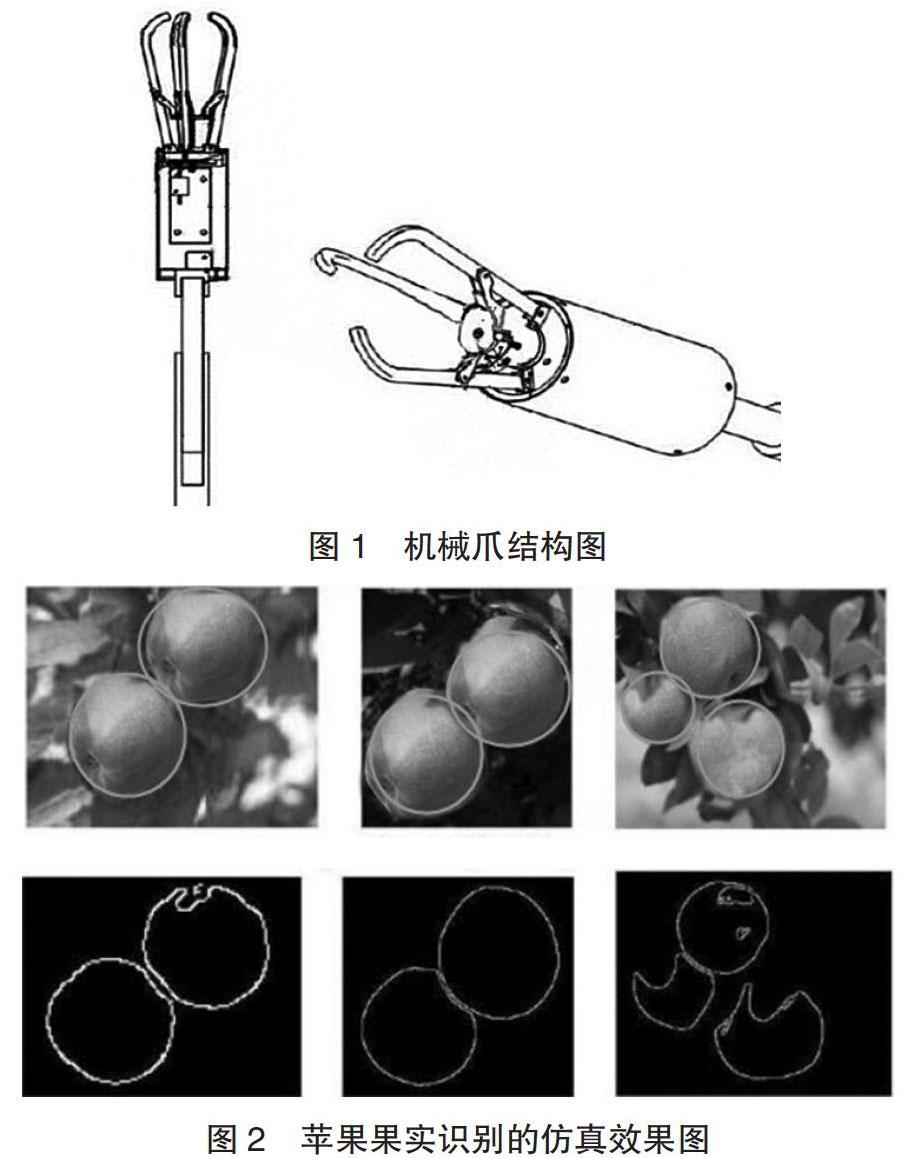
苹果自动采摘机主要利用红外测距和单片机处理数据发布命令。工作时,打开摘果控制开关,并使机械爪处于张开状态,对经过图像识别后的果实进行红外测距,使机械爪对准目标采摘水果,经过红外测距、单片机处理数据,判断是否可以包裹水果,距离在设定范围内,通过单片机给予继电器打开命令,内部电机得到电源输入,驱动机械爪闭合并抓紧苹果,当机械爪抓住水果遇到阻力时,内部电机停止转动,使机械爪保持抓紧水果状态;此时电流加大,驱动另一继电器,使位于机械爪底部的另一电机带动机械爪转动约180°,便可将水果采摘下来;然后收缩机械爪到一定范围,给于内部电机反向电源,驱使机械爪张开,使果实放入固定橡胶框之中,完成果实摘取,机械爪结构如图1所示。
1.2 识别定位模块
1.2.1 苹果果实的识别
苹果自动采摘机的视觉系统相当于苹果采摘机器人的眼睛,机器人必须通过它来识别环境中的苹果并准确定位位置信息,同时快速将信息返回给主控制器。该机械利用STM32F7驱动OV7725摄像头进行图像实时采集,在TFT屏幕上实时显示并识别图像中的特定颜色,在颜色的周围画上圆框,从而实现识别的功能。运用腐蚀算法确定好腐蚀中心,同时指定范围的颜色,这个范围根据苹果的大小来设定,若在此区域出现了预先设定的红色,系统会给其进行上框,以获知前方有苹果存在,驱动电机来实现自身位置调整,使机械臂直面目标区域。仿真效果图如图2所示。
1.2.2 果实的定位
苹果自动采摘机通过激光来测量摄像头前方的距离,当机器人移动到苹果前面时,红外测距模块会发出光波并通过苹果反射回来,从而测量出机器人与苹果之间的距离。系统会对比传输回来的距离与机械臂能够伸张的最大距离,距离合适时,系统便会驱动机械臂进行抓取,否则机器人会继续调整位置,直到满足预设条件。
2 控制模块
苹果采摘机器人控制系统分为识别定位和主控两大模块,主控系统包括电机驱动模块、舵机驱动模块、电源模块三个模块,控制系统总体结构如图3所示。
2.1 电机驱动模块
苹果自动采摘机的机械臂驱动电路如图4所示,主要采用STM32F103对驱动进行控制,再采用L298N电机进行驱动,以此来控制机械臂的运行,达到本设计的需求。本电路中设有电源模块、指示灯显示模块,使用STM32F103与核心主控板相互通信,以更好地控制机械。这种控制很大程度上减轻了主控核心芯片的负载,使其可以更好的工作,不同于单芯片控制系统,所有数据全由一个核心来接收、分析和处理,会使芯片的寿命缩短,效率降低。同时,L298N电机是一种实用并且廉价的电机,可以有效降低成本。
2.2 舵机驱动模块
舵机驱动采用PCA9685作为驱动芯片,利用I2C通信,内置一个PWM驱动器和一个时钟。用3.3V单片机控制,并安全驱动到6V输出,内部自带25MHz振荡器的舵机模块,无需外接,可使电路更加简化。
此舵机驱动接口简单,只需连接四条线(VCC、GND、SDA、SCL)到单片机,便于后期调试维护。舵机驱动模块外围电路如图5所示。
2.3 电源模块
供能装置选用(3S 2200mAh 20C)的锂电池。此款锂电池正常工作电压可达12.6 V,电池的最大放电电流为12 A,足以满足苹果采摘机器人各机构的正常工作要求。
电源的芯片采用LM2596SX-5.0/NOPB,输入最大电压可达到40 V,输出最大电流可达3 A,具备低功耗待机模式,在过热情况下有自动关断和限流保护的功能,以满足机器人的需求。
抓取模块含有4个数字舵机,工作时瞬时电流较大,因此把舵机供电和各芯片供电分开为两个独立的部分,设计如图6所示。开关引脚(ON/OFF)接地,默认芯片为使能;输出引脚(OUT)外接33 μH电感、肖特基整流二极管(IN5824),以保证电源关闭瞬间输出的电流连续,接入的220 μF电解电容可防止输出电压突变;稳压反馈引脚(FB)接输出端,可调节输出端的电压。采用2块LM2596SX-5.0/NOPB芯片,其输入引脚(IN)连接锂电池正极,并且外接680 μF电解电容,可防止输入端电压突变。
3 结语
本次研究的基于单片机的苹果自动采摘机,不仅能提高果农的采摘效率,而且还能降低果品的受伤率,节省了人工成本。因此,该苹果自动采摘机的研究对苹果产业具有深远意义。
参考文献:
[1] 王丹丹,宋怀波,何东健.苹果采摘机器人视觉系统研究进展[J].农业工程学报,2017(10):59-69.
[2] 米纪千,林伟青.新型辅助人工苹果采摘机探析[J].南方農机,2018,49(7):36.
[3] 孙贤刚,伍锡如,党选举,等.基于视觉检测的苹果采摘机器人系统设计与实现[J].农机化研究,2016(9):151-155.
[4] 王琪,丁柏文,陈萍.苹果采摘机器人控制系统设计[J].电气与自动化,2016(9):150-152.
(责任编辑:刘昀)
