三自由度并联打磨机器人设计与仿真
2020-08-10何金哲孔繁强刘庆友张游周恒骥
何金哲 孔繁强 刘庆友 张游 周恒骥

摘 要:该文根据空间三自由度并联机构结构稳定、逆解易得的特性,设计了一种空间三自由度的并联打磨机器人。建立了机构运动方程,得到了动平台姿态与3条支链变形量的关系。基于Adams软件对建立的三维模型进行仿真,并通过样机模拟得到机构的工作参数。仿真和试验结果表明,这种打磨机器人能够完成空间曲面的打磨,该机构结构简单,控制方便,具有广泛的应用价值。
关键词:打磨机器人;空间三自由度并联机构;运动学逆解;Adams仿真
中图分类号:TP242.2 文献标志码:A
0 引言
并联机构具有串联机构不可比拟的独特优势,如承载能力强、误差小、自重负荷比小、动力性能好、控制容易等结构特性,并联机器结构可以大幅减少其零件数以及减少制造成本和库存成本,同时更加容易组装和模块化。除此以外,并联机构具有运动学逆解求取容易的特性,很好地满足了打磨任务的要求。基于以上优点,该文采用并联机构实现空间曲面的轨迹运动。
传统打磨机构主要针对XY平面维度上的应用,而空间曲面的打磨要求打磨机构在三维空间曲面内的灵活自如地运动(Z轴以及绕坐标轴的α和β方向的运动(平动、转动))。1985年克拉维尔设计的Delta型并联机构[1]经过几十年的发展得到了广泛应用,经过分析发现Delta型并联机构很好地实现了三维空间的平动,但由于其动平台的姿态始终不变,因此无法满足需要。1965年,德国Stewart[2]发明了六自由度并联机构,通过6个独立液压缸实现机构六自由度运动,可以很好地满足需求,但因为机构自由度的增加导致求解过程非常复杂,所以增加了控制的难度且大大增加了生产的成本。3-RRR球面并联机构可以实现球面三自由度,且该类机构的运动学正反解都很简单,是一种应用很广泛的三维移动空间机构,Alige Eye[3-4]作为三自由度并联机器人中的一种,理论上的工作空间为完整球面,但经过验证发现,实物加工困难且对精度要求高,容易出现各类碰撞干涉。此外,打磨也需要机构具有良好的承载能力和稳定性,而Alige Eye独特的结构很难满足这一定要求。根据人类踝关节的运动特征可知,踝关节具有3个转动自由度,具有高度的灵活性和稳定性[5],对此该文结合并联式踝关节机构和3-RSS/S并联机构的特点,提出了一种空间三自由度并联打磨机器人机构,分析打磨机构的运动方程,通过仿真和样机试验验证了打磨机构能适应工件曲面打磨加工的场景。
1 三自由度并联打磨机器人设计
1.1 机构描述
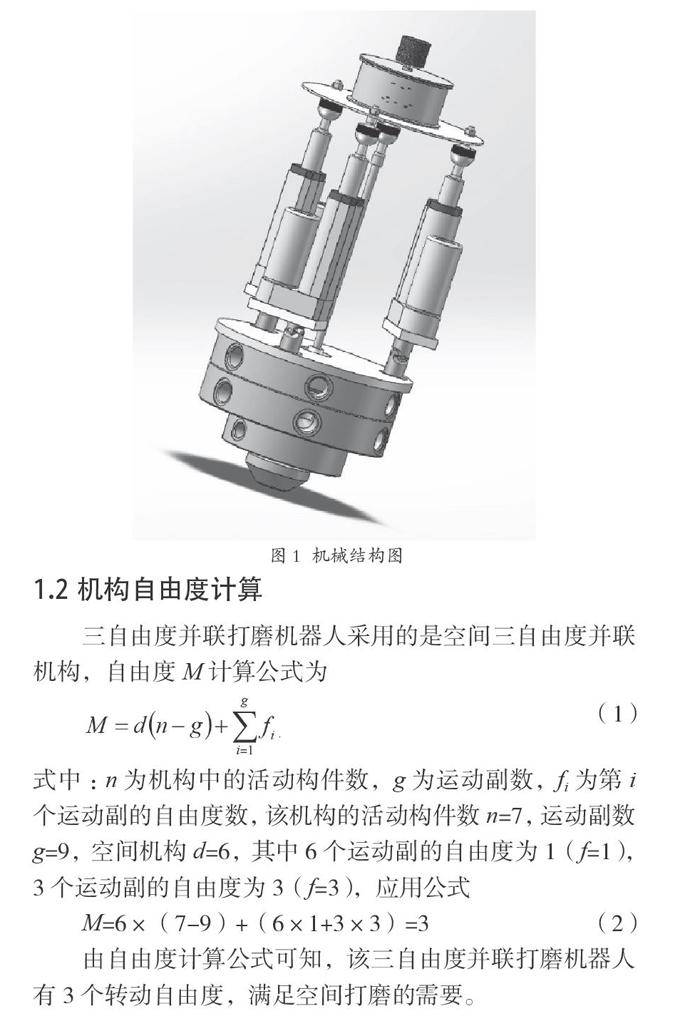
该机构由动平台、静平台、打磨装置、3条相同的支链和一个约束轴构成。其中动平台(上平台)与打磨装置相连,静平台(下平台)可以通过快换装置與机床或机械臂末端相连,3对支链从上到下由1个球头(球副)、电缸(移动副)、十字万向节(转动副)构成。支链通过球头和万向节分别与动平台、静平台相连。约束轴和动平台通过球头连接约束动平台的活动范围,同时还起到支撑动平台、高结构稳定性的作用,机械结构如图1所示。
1.2 机构自由度计算
三自由度并联打磨机器人采用的是空间三自由度并联机构,自由度M计算公式为
(1)
式中:n为机构中的活动构件数,g为运动副数,fi为第i个运动副的自由度数,该机构的活动构件数n=7,运动副数g=9,空间机构d=6,其中6个运动副的自由度为1(f=1),3个运动副的自由度为3(f=3),应用公式
M=6×(7-9)+(6×1+3×3)=3 (2)
由自由度计算公式可知,该三自由度并联打磨机器人有3个转动自由度,满足空间打磨的需要。
2 机构运动学分析
2.1 三自由度并联机器人运动模型的建立
三自由度并联机器人是通过3条支链将动、静平台连接起来的闭环机构。在该机构中有3条相同的支链,每条支链从下到上依次为转动副R、虎克铰u、移动副P、球铰S。以第4条支链为中心支撑杆,使用单一球铰连接动、静平台,静平台上3条支链的3个点A1,A2,A3分别位于以静平台中心为圆心,半径为100 mm的圆上(即支链与静平台连接点处),动平台上3条链的3个点B1,B2,B3分别位于以动平台中心为圆心,半径为100 mm的圆上(即支链与动平台的连接点处),动平台厚度为5 mm,动静平台之间的距离为200 mm。具体示意图如图2所示。
2.2 三自由度并联机器人位置反解分析
在描述三自由度并联机器人的位姿时,采用的运动学研究方法是将三维坐标增广为四维坐标,将刚体的旋转和平移纳入一个四阶方阵中,通过欧拉旋转方程将平移、旋转与矩阵运算联系起来。对于选定的静平台坐标系{A},空间中任意点P的位置可用3×1的列向量表示,即
(3)
式中:PX,PY,PZ分别是点P在坐标系{A}中分别沿X,Y,Z方向上的分量。为了描述空间某刚体B的方位,需要在刚体B上建立一直角动坐标系{B},并将动坐标系{B}与刚体B固连。用动坐标系{B}的3个单位主矢量BX,BY,BZ分别与静坐标系{A}的AX,AY,AZ构成的方向余弦矩阵来表示刚体B在坐标系{A}中的位置姿态,即
(4)
式中:表示刚体B相对于坐标系{A}的位置姿态,称为旋转矩阵。旋转变换矩阵一般是通过绕X轴旋转一个角度、绕Y轴旋转一个角度以及绕Z轴旋转一个角度来描述的。要完全描述刚体B在静坐标系{A}的位姿,首先要将动坐标系{B}与刚体B固连。动坐标系{B}的坐标原点定在刚体B的中心点上。由于P点不能移动,因此(XP,YP,ZP)为(0,0,ZP) (ZP表示动平台中心到静平台之问的距离为定值)。动坐标系{B}相对于静坐标系{A}的原点位置和坐标轴的方位分别用位置向量和旋转矩阵来描述,即
空间任意点P在两坐标系{A}和{B}中的位置矢量分别为和 ,则它们之间具有以下变换关系:
基于前述分析,设动坐标系B-XYZ为定坐标系A-XYZ沿Z轴平移(0,0,200)后的坐标系,绕Z轴转a角,绕Y轴转b角,最后绕X轴转c角,对于旋转次序,我们作如下规定
=rot(Z,a)rot(Y,b)rot(X,c)
式中:表示为坐标系{B}相对于坐标系{A}的旋转矩阵。
则其欧拉角转换矩阵为
=trans(0,0,200)rot(Z,a)rot(Y,b)rot(X,c)
则其欧拉角转换矩阵为
式中:trans為{B}相对{A}的平移,rot为{B}相对{A}根据X,Y,Z轴旋转给定的角度
通过MATLAB编程求解,可以求解出AP ,动平台上的3点坐标分别为B1(B1X,B1Y,B1Z),B2(B2X,B2Y,B2Z),B3(B3X,B3Y,B3Z),其中
静平台上3点的坐标分别为:
A1(-50, ,0),A2(-50,-,0),A3(100,0,0)
结合机构特点与2点之间的距离公式可得,杆长为L1=︱A1B1︱,L2=︱A2B2︱,L3=︱A3B3︱。
将所得的A1,A2,A3,B1,B2,B3代入杆长计算公式中,初步给定a,b,c的运行区间为[-π/12,12/π],可求得相对应的电动推杆杆长及其变化长度。
3 Adams仿真验证
该文中设计的三自由度并联打磨机器人有3个相同的对称支链,每个支链上需要安装一个驱动电机,考虑到电动推杆质量较大,且末端执行器是轻质产品,系统的总动能主要分布在电动推杆上。因此在动力学建模时可对机器人进行简化:忽略动平台和末端执行器质量以及动能。
首先使用三维软件SolidWorks进行建模,确定三维模型的参数尺寸。模型主要包括静平台、动平台、电动推杆等36个部件,其中电动推杆初始长度都是200 mm。在ADAMS环境下建立运动仿真模型,其姿态变化如图3所示。打磨装置在3条由电动推杆组成的支链的带动下,可以根据工件的形状进行打磨。
添加运动函数:
X向平移=0.005×time×sin(2×pi×time)
Y向平移自由
Z向平移=0.005×time×cos(2×pi×time)
绕X旋转自由
绕Y旋转=0×time
绕Z旋转自由
设置仿真时间5 s,步长500步进行简单验证
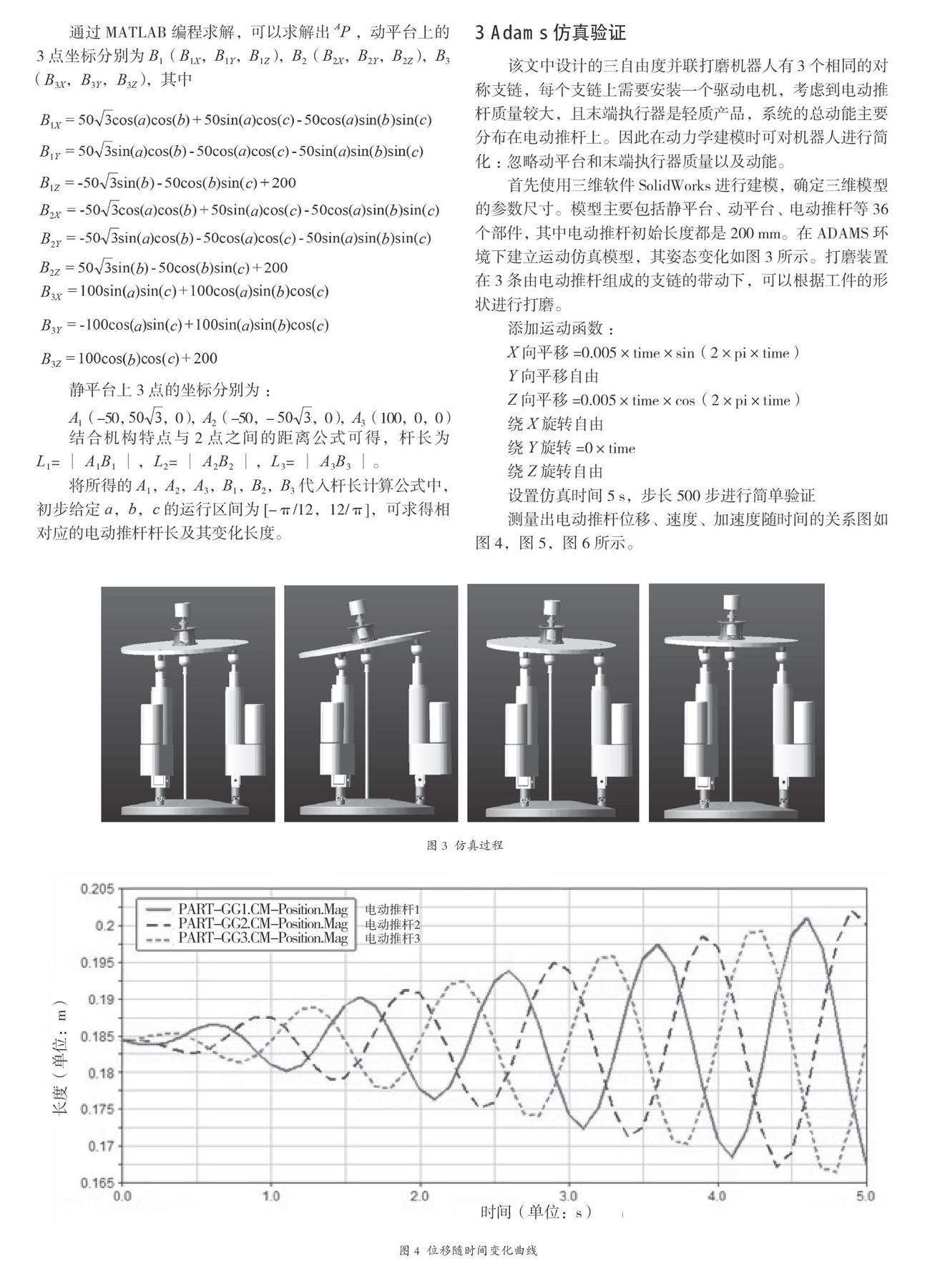
测量出电动推杆位移、速度、加速度随时间的关系图如图4,图5,图6所示。
仿真结果表明,电动推杆速度、加速度曲线连续且变化平滑,关键位置速度、加速度接近0,满足轨迹规划要求。在仿真过程中,运动能够平稳运行,具有良好的稳定性,适合打磨场景。
4 样机及实验
4.1 样机的电路系统
动力源选用了12 V的电动推杆,并且可以通过编码器的反馈精确控制电动推杆的伸长量,电机驱动选用了L298N的直流电机驱动,可以通过改变PWM的大小来改变电机的转速跟转向,完成对电机转角的闭环控制,姿态传感器选用的JY61,可以通过和主控板的串口通信,得到当前机构的滚转角(X轴)、俯仰角(Y轴)、偏航角(Z轴)的反馈值(姿态角解算时所使用的坐标系为东北天坐标系),主控板采用的STM32F407。上位机跟主控板之间也通过串口通信,主控板接收上位机发出的设定角度值。另外,机构上端的打磨头由无刷电机带动,机构开始运动时,打磨头开始旋转,满足打磨物体的需求。
4.2 控制思路
通过上位机向主控板发送数据,得到所需角度的设定值。主控板对所需角度的设定值跟当前的实际角度相减,并将相差值等分一定值之后,得到一个每次角度的累加值,通过对三自由度并联机构的运动方程的逆解,得到要到达设定角度时,每一根推杆应该移动的距离。主控板与电动推杆之间连接有电机驱动L298N,再通过电动推杆上的编码器的反馈值构成闭环控制,实现对每根推杆杆长移动距离的精确控制。在不断累加的过程中,得到的姿态反馈值会和设定值不断比较,直到两者差值小于设定阈值时,表明机构已经达到所需的姿态。由于机构结构的特性,如果要使机构按预定的运动轨迹运动,就需要计算出所需轨迹上的多个(尽可能多的)细分的点,使机构按上述流程不断拟合这些轨迹上的点,从而拟合所需轨迹,实现轨迹运动。控制流程和原理图如图7,图8所示。
5 结语
通过分析空间三自由度并联机器人的结构特性,列出并联机构的位置逆解的表达式,通过MATLAB软件的分析计算,并结合Adams软件对打磨轨迹进行仿真,验证了机构的可行性。通过样机搭建,简单模拟了打磨场景,可以满足空间曲面的打磨要求。
小型三自由度打磨机器人因其优越的结构构造,使得其具有更好的性价比,更适合大批量生产,在保证产品精密和高质量的同时,也能优化生产效率和成本。将小型三自由度打磨机器人应用于抛磨工艺,有助于提高机械加工的效率,降低生产成本,可以给抛磨业的发展提供一定的帮助。
参考文献
[1]梁香宁,牛志刚.三自由度Delta并联机器人运动学分析及工作空间求解[J].太原理工大学学报,2008(1):93-96.
[2]Stewart D.A platform with six degree of freedom[J].Proceedings of the Institution of Mechanical Engineers,1965,1(80):371-386.
[3]张林,郭旭侠,史革盟,等.3-RRR球面并联机器人正向运动学分析[J].机械传动,2019,43(7):27-34.
[4]王超群,高踔,陈柏,等.3-RRR球面并联机构的工作空间分析及结构优化[J].机械设计与制造,2015(4):55-58.
[5]韩亚丽,于建铭,宋爱国,等.并联式踝关节康复机器人研究[J].东南大学学报(自然科学版),2015(1):45-50.
