成果 科技支撑安全提升
2020-08-07刘建蓓
据统计,“道路交通安全主动防控技术及系统集成”项目目前已开展自然驾驶和驾驶模拟仿真实验近400人次,收集无人机视频近7000多分钟、路侧视频6000多小时、图片数据45000多张,收集交通流数据360多万条、交通事故数据20多万起,数据采集工作已全部完成。累计完成6类共计16项实验,采集了大量的驾驶员、车辆性能及运行状态的实验数据,构建了驾驶员操控原理、人机交互运行风险、危险驾驶行为参数等模型、算法49项,理论方法、模型算法研究基本完成。开展多项装备(设备)研制,已完成10套装备、设备、终端的研制,完成了测试性实验300余次,测试实验里程1000公里,研发持续8个多月,实验累计工作量4000余人(月);开发软件系统3项,完成了测试性实验50余次,研发持续5个多月;初步集成开发平台4项,完成了测试性实验200余次,测试功能模块100余个,研发持续8个多月。
理论研究成果
不同驾驶人操控状态下车辆动力学响应特性
进行驾驶操控和车辆动力学响应多参数采集系统集成,利用道路试验测量数据完成驾驶人操控行为和车辆动力学系统辨识;建立车辆动力学联合仿真模型,开展道路试验,分析小客车、拖挂车、大客车在多工况下车辆的动力学响应特性。
不同道路环境与单车车辆运行条件下人-车交互影响机理
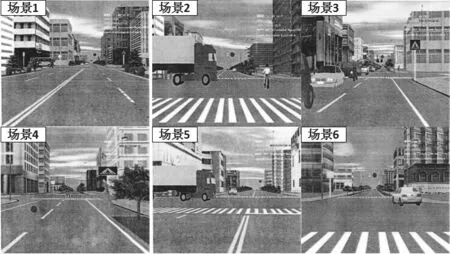
不同道路场景设计
主要从构建车路实时耦合的道路模型、驾驶人与车辆适宜性分析、驾驶行为分析、复杂条件下个性化驾驶人模型的建立、单车交互下典型危险工况风险因素的识别等方面展开研究。
驾驶行为谱的定义及构建方法
分析了典型场景下驾驶行为谱要素的变化规律。解析了场景属性、驾驶人属性、车辆运动学指标、驾驶操纵指标和驾驶行为变量等驾驶行为谱构成要素,提出了驾驶行为谱的构建方法,针对自由驾驶、跟驰和超车三类驾驶行为,介绍了对应的驾驶行为变量及其获取方法。
利用自然驾驶数据分析驾驶员驾驶特征并建立不良行为判别模型
利用自然驾驶车辆在真实的环境下进行实车实验,以驾驶员个体为研究对象,通过对比相同的行驶环境下驾驶员的行为来挖掘驾驶员个体的驾驶特征,通过时域和频域特征的提取,挖掘驾驶行为关键特征参数,以实现对微观驾驶行为的准确描述。
结合不良驾驶行为关键特征参数,采用人工智能算法,建立不良驾驶行为判别模型。训练针对不同类型不良驾驶行为的判别模型,并对判别模型进行仿真验证。考虑影响驾驶行为的风险源因素,建立不良驾驶行为风险评估指标体系,在此基础上,建立了不良驾驶行为事故概率风险评估模型和事故后果风险评估模型,并综合两者的不良驾驶行为综合评价模型,实现了对不良驾驶行为的风险评价,以及风险等级划分。

自然驾驶数据采集装备
技术研究成果
确定了在途车辆运行安全备选指标构建及核心指标阈值
研究在途车辆运行状态的转移规则,通过监测车辆运行状态、车辆驾驶员驾驶行为、道路线形、天气状态等人、车、路、环境动态数据,实现在途车辆运行状态的自诊断及风险评估。计算了不同天气下运行速度限制建议阈值,初步实现了不良天气下的运行速度阈值预警;研究了不良驾驶行为指标及相应阈值的确定方法,实现了不良驾驶行为预警;建立了既可避免发生追尾碰撞事故,又不影响道路通行能力的安全距离的计算方法,实现了不安全跟车距离预警;构建了道路线形与运行速度一致性的规则,实现了超速状态预警。
研发了基于多信号融合的智能车载防火设备、自动灭火设备、预警系统
通过分析车辆发生火灾时物质燃烧释放烟、热、火焰的差异,开创性的基于FDS火灾动力学仿真软件分析乘客舱、行李舱、发动机舱等区域的烟雾、温度传感器的最优布置数量与位置,采用多源监测、多信号融合技术,开发了1套基于多信号融合的火灾监控预警数据采集系统,并以此驱动自动报警、逃生及灭火系统的运行。基于多信号融合技术构建了1个由底层局部融合层、神经网络数据融合中间层、顶层粗糙集融合推理层组成的1个三级火灾监控识别系统。底层局部融合层在为顶层提供初始预警信号的同时保留原始火灾发生位置,实现针对性的灭火;顶层对底层信号的原始属性依赖较小,降低了报警误判概率,减少报警信号对驾驶员及乘员的干扰。
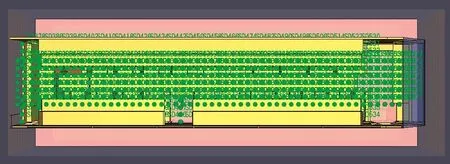
烟雾温度采样点布置位置
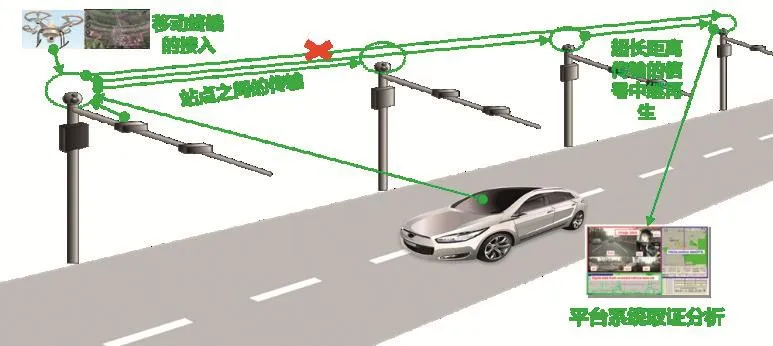
海量交通数据传输技术应用场景

基站选址现场测试情况
研发了基于无线激光/微波多源链路的海量交通数据传输技术及装备
针对基于无线激光/微波多源链路的海量交通数据传输技术及装备,完成了海量交通数据传输设备应用场景分析和传输技术梳理。具体地分析了海量交通数据传输应用场景,明确移动终端无线光接入和长距离无线激光高速传输两个具体技术需求;提出了复杂交通信息网络中动态通信站点间海量交通数据实时传输方法。
构建高速公路高风险路段风险评价指标体系
高速公路高风险路段风险评估与短临预警部分,针对高速公路典型路段,在静、动态风险理论研究基础上:一是构建了静态风险评价指标体系,根据线形指标与事故率关系建立静态风险指标阈值划分标准;二是根据PEMS交通传感器及事故数据,利用FISHER方法构建交通流参数与风险的判别函数,并通过logistic回归法探究FISHER判别指数与道路风险因素的相关关系;三是针对高风险路段易发生车辆碰撞情形,提出基于北斗高精度定位技术、车路通信技术、高精度地图匹配技术的车-车主动防撞短临预警方法及车辆轮廓冲突预测模型;四是开发车载高精度定位短临预警终端,集成研发高速公路路侧北斗地基增强站系统和车路通信系统。

终端内、外部结构
提出营运车辆智慧型安全驾驶辅助装备依托算法
在“营运车辆智慧型安全驾驶辅助装备研发”中,采用深度学习技术及多传感融合技术进行车道偏离预警及防碰撞预警技术研究。深度学习检测车辆或障碍物具有较高的准确率,毫米波雷达探测目标技术具有稳定的探测性能和良好的环境适应性,采用多层级毫米波雷达和相机数据融合的方法,能够同时得到前方车辆的相对距离、相对速度和属性,相比较单独使用一类传感器,检测精确度更高,同时能够兼顾实时性要求。
道路交通安全主动防控系统平台及交通安全信息服务App原型开发

鱼眼镜头原始图与矫正效果图
在数据标准体系研究、数据互联互通技术研究、交通资源数据库设计的基础上,完成了道路交通安全主动防控系统平台及交通安全信息服务App的原型开发,并进行了相关功能测试,实现了危险驾驶行为短临报警、行车环境风险在线预警、交通事件信息提示、一键报警、行程管理、交通事件上报、视频图像管理、实时路况展示、高危路段分布展示、报警信息统计分析等功能。
项目示范工程方面,主要围绕各专题的示范内容开展示范内容细化、示范区域选定、示范方案制定、示范相关技术、接口、平台对接,以及示范方案优化、迭代等准备工作,同时协调示范内容和相关技术研发单位多次研讨,保障各示范内容与对应专题技术研发的衔接性。目前,已落实示范工程单位5家,示范工程项目6个。
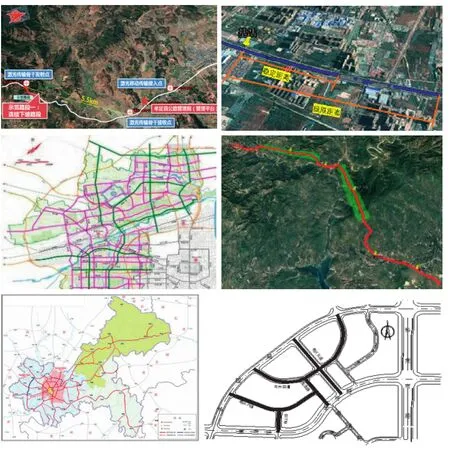
示范路段示意图
