高精度GNSS辅助下MEMS惯导的初始对准方法
2020-08-07朱建良薄煜明
张 旭,朱建良,薄煜明
(南京理工大学 自动化学院,南京 210094)
捷联惯性导航系统在进入导航任务之前,首先要进行姿态的初始对准,其核心任务是确定载体坐标系到导航坐标系的姿态矩阵,建立起精确的平台初始指向。初始对准的精度和对准过程用时的长短对惯性导航系统的工作性能的好坏有很大影响。
按基座运动状态分类,初始对准可分为静基座对准和动基座对准。捷联惯导动态初始对准通常分为粗对准和精对准两个过程。在粗对准过程中,可直接依靠捷联惯导的惯性传感器测量输出获取初始姿态矩阵,或利用外界提供方位信息从而获得初始姿态矩阵;精对准过程是在粗对准的基础上,通过运用卡尔曼滤波、EKF等算法估计失准角,提高对准精度[1-3]。粗对准是精对准的前提,精对准的精度、速度以及可靠性很大程度上取决于粗对准的精度。如何使捷联惯导系统得到在运动条件下的粗略初始姿态矩阵,从而获得精确初始对准,一直是一个十分值得探讨研究的课题。
对于动基座条件下的粗对准方法,目前已提出了很多粗略姿态计算方法,如传递对准法、罗经对准法、SINS/GPS组合对准法等[4]。其中传递对准法的应用较普遍,利用精度比较高的主惯导系统来对子惯导系统进行对准,但对惯性器件精度要求高;在摇摆基座上常用罗经对准方法进行对准,但罗经对准法存在稳定需要时间较长的局限性[5]。初始对准过程也可通过借助外部设备来完成,胡士峰等[6]利用磁力计辅助求取初始姿态矩阵,王跃刚等[7]、薛海建等[8]提出利用里程计辅助进行初始对准。近年来随着我国卫星导航系统蓬勃发展,借助卫星导航输出信息实现对准的方法也日益成为主流和热点,郝雨时等[9]、张复建等[10]则利用GNSS双天线测姿原理获取航向角信息辅助进行初始对准。奔粤阳等[11]借助卫星导航系统位置信息辅助进行粗对准,但其所用惯性器件精度较高。
低成本惯性测量单元的初始对准问题一直是导航领域的研究热点。对于卫星导航辅助MEMS惯导初始对准这一问题,传统上利用普通GNSS系统输出求取载体加速度信息进行航向角解算。但卫星导航定位数据的更新频率慢,得到的加速度信息和惯导输出比较存在较大差距,导致所求航向角误差大。本文提出利用单天线高精度GNSS导航定位系统输出的速度矢量信息辅助MEMS惯性导航系统确定载体初始姿态的一套改进方法,并进行了试验验证。
1 坐标系定义
文中涉及的主要坐标系的定义及其表示符号介绍如下:
(1)地心惯性坐标系(i系):oxi轴在赤道平面内且指向春分点,oyi轴指向地球自转方向,三轴构成右手坐标系;
(2)地球坐标系(e系):与地球固连,oxe轴在赤道平面内且指向中央子午线,oze轴沿地球自转方向,三轴构成右手坐标系,系相对于系的转动角速度是地球自转角速率;
(3)导航坐标系(n系):取“东-北-天”地理坐标系作为导航参考坐标系;
(4)载体坐标系(b系):取“右-前-上”坐标系作为载体坐标系;
(5)水平方位坐标系(h系):隐含方位角无效或还未确定,在这里又称自由方位坐标系,oxh轴和oyh轴两水平轴稳定在水平面内。
2 MEMS惯导解析初始对准方法

本文初始对准方法中,粗对准的初始对准过程要先完成水平对准,而后利用卫星导航信息去获取航向角信息。在对准过程中,载体运动中通过高精度GNSS设备可获取卫星导航信号,对如汽车或固定翼的飞行器这种运动速度方向沿着载体纵轴方向的载体,可依靠运动轨迹的航迹角或GNSS系统所测量的速度矢量,得到载体纵轴方向相对于导航坐标系地理北向的方位角。而对于速度方向具有任意性的载体,也可通过水平方向上做短时间内的直线加速运动获取航向角信息。传统选用卫星导航提供的加速度信息进行航向角计算,本文采用高精度GNSS设备输出的速度矢量信息获取航向角。结合陀螺仪姿态更新获得的俯仰角和横滚角,可得到完整的初始姿态矩阵,从而完成初始化。为符合右手规则并使运算方便,解算和实验过程都将航向角定义为北偏西为正,且取值范围为(-π,π]。
2.1 水平姿态对准
在导航坐标系(n系)捷联惯导系统比力方程为
(1)

当捷联惯导处于静止状态时,速度与加速度为0,即运载体的线运动及其导数均为0,此时有害速度数量级小可忽略,比力方程式可以简化为:
(2)
其中gn=[0 0 -g]T
由式(5)整理可得:
(3)

步骤1:首先可构造姿态矩阵最后一行

将得到的C'2归一化即C2=C'2/|C'2|,获得第二行向量。
步骤3:利用行向量C1满足正交C1=C2×C3,构造第一行向量
(4)
(5)

此时可计算姿态矩阵的三个欧拉角,仅有水平姿态角(俯仰角和横滚角)是载体真实姿态的反映,运载体处于自由方位坐标系,其方位角未定,无实际物理意义。
2.2 利用卫星导航进行方位对准
选用GPS/BDS高精度卫星导航定位系统,利用载波相位差分技术(RTK技术),其卫星导航设备输出固定解精度可在cm级,其卫星导航输出相应参数精度也将提高近3个左右数量级。卫星导航提供的经纬高、速度、运动方向角等信息参数,通过载体水平方向上做短时直线加速度机动,可较为精确获取运动时的速度矢量,从而获得实际姿态矩阵。

(6)
(7)
其中φ表示h系与n系夹角。
由式(1)比力方程,忽略哥氏加速度和向心加速度两个有害加速度,比力方程可近似为:
(8)
由式(6),式(8)可进一步表示为:
(9)

2.2.1利用水平加速度获取方位矢量信息
导航坐标系下在运动状态的运载体的加速度与速度都不为0。
通过[tk-1,tk]时间段内的卫星导航速度平均变化量获取加速度为:
(10)

由式(9)可得:
(11)
由式(11)可解得:
(12)

2.2.2利用水平速度获取方位矢量信息
利用水平加速度获取方位矢量信息时,需取较短时间段[tk-1,tk]内获取的加速度值,但实际应用中,卫星导航定位数据的更新频率远不及捷联惯组(陀螺仪和加速度计)的数据更新频率,实验中捷联惯组以50 Hz频率输出,卫星定位信息以5 Hz频率输出,取得的[tk,tk+1]时间段较长,采用卫星导航系统平均速度变化量作为运载体加速度与水平坐标系下平均比力相较,误差较大。
(13)

由式(13)可解得:
(14)
3 载车实验结果与分析
为验证本文初始对准算法的性能,实验中设置车载实验台如图1,将其固定于定制铝板固定于车顶,进行跑车实验。为了比较初始对准方法,在整个实验过程中于车顶固定与车头方向一致的卫星导航双天线系统,提供精确航向角同时进行精对准过程作为实验参考,其输出航向角精度为0.2°。实验地点选取学校内某开阔地带,载车进行大致为起步从北往南后往东停止约200 m的行进路线。
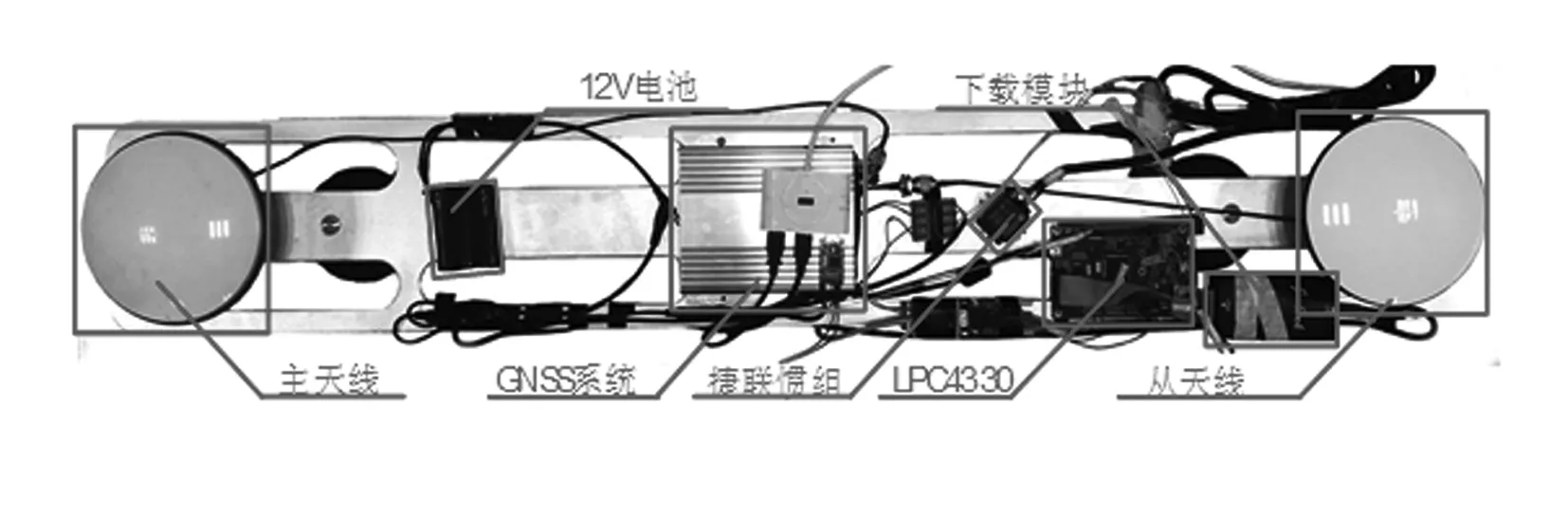
图1 实验平台安装图
载车实验设备主要包括:由捷联惯组、卫星导航设备(基准站、移动站)、双天线、12 V电源、LPC4330开发板组成的车载平台、载车以及导航计算机。其中,捷联惯组中陀螺漂移约为3°/h,加速度计零偏约为20 μg,捷联惯组以50 Hz频率输出。卫星导航设备中的移动站获取差分数据稳定于固定解时,其动态定位精度约为0.8 cm,以5 Hz频率输出。试验中移动站输出$BDRMC数据帧,可获取导航坐标系下速度矢量信息,并支持双天线测姿。在实际情况中,较难实时考察动基座初始对准的精度,于是采用以下动基座初始对准实验方案:
(1) 基准站接入天台天线并上电,放置室内。将双天线距离1 m固定于定制铝板,捷联惯组轴(前向)以双天线连线为基准左旋45°固定于铝板上,放置车顶。将接好天线的移动站与用于整合处理数据的LPC4330开发板组装至铝板并上电,预备好跑车实验的实验平台。
(2) 对准过程中载车运行状态大致为:停车约5 s(此时启动初始对准程序),加速起步约5 s,匀速行驶约16 s,刹车停止约5 s,停车约5 s(此时结束初始对准程序)。进行静止一会后开始起步加速运动而后减速刹车至静止的行驶实验。
(3) 行驶过程中动基座初始对准后,立即利用对准结果为惯导系统建立初始姿态矩阵,并进行组合导航,记录全时段数据。
(4) 卫星导航设备利用双天线所得数据提供精确初始姿态作为比较参考。

图2 载车行进轨迹图
图2为载车实验运动轨迹图,红点处为起步位置。载车起步向南行驶后微向东行驶并停车,满足实际情况。由高精度卫星导航系统输出双天线方位数据和运动角度数据可获取天线安装误差角,比较获得实验过程中的安装误差角约为0.2650°,去除安装误差可得航向角参考值。
高精度GNSS可提供载体速度矢量,较大的水平加速度更有利于求解可靠航向角,故取第6~10 s的起步加速段进行航向角求取。利用上文两种方法进行比较,在启动阶段航向角的比较曲线如图3所示。
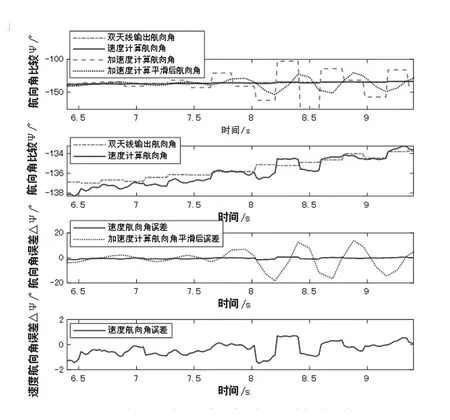
图3 启动阶段航向角比较曲线表1 航向角误差均值标准差比较
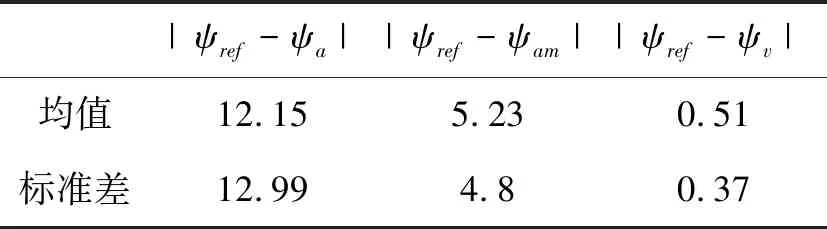
|ψref-ψa||ψref-ψam||ψref-ψv|均值12.155.230.51标准差12.994.80.37

图4 航向角大小与姿态角误差比较曲线
如图3启动阶段航向角比较,可明显看出利用速度求取航向角曲线更为平滑,与参考值也更为接近,误差范围可维持在1.5°左右,加速度计算的航向角结果在取均值平滑处理后误差有一定幅度的减小。航向角误差均值标准差比较如表1所示,其中|ψref-ψa|表示利用加速度进行航向角求取的误差量,|ψref-ψam|表示利用加速度求取航向角平滑处理后的误差量,|ψref-ψv|表示利用速度计算航向角的误差量,经计算|ψref-ψv|的均方差为0.37°(1σ),可明显看出利用速度求取航向角误差量小且波动小,误差精度能够较稳定的跟踪参考值曲线。由此可见,利用速度求取航向角的方法更优。
利用起步加速段获取的姿态进入精对准阶段对初始姿态值误差修正,如图4加速度获取与平滑后的航向角结果误差较大,需较长时间才可修正至零,速度算得的航向角结果误差较小,可随载车运动进行进一步修正,趋势向零,方法可行,可在较短时间内姿态对准。
4 结论
本文针对基于微机械陀螺和加速度计的无磁力计MEMS惯性导航系统,设计了在起步阶段利用外部高精度GNSS系统提供速度矢量信息进行辅助的粗对准方法,与传统利用GNSS系统提供加速度求取航向角方法相比,求取的航向角误差和波动小,结果更优。通过卡尔曼滤波精对准过程可进一步修正误差,误差趋势可较快向零,提高对准精度。该方法能为捷联惯导系统提供一定精确的初始条件。