隧道贯通测量仿真技术及软件开发
2020-08-06
(西安铁路职业技术学院,西安 710600)
1 隧道贯通测量误差模拟系统流程

图1 贯通误差模拟系统流程图
1.1 模拟仿真软件基本功能
本隧道贯通误差模拟系统大量运用于隧道贯通测量的模拟误差计算,与测量控制网平差和图形仿真模拟处理。
1 隧道贯通计算与误差模拟处理
贯通误差模拟系统数据处理分为方位角观测值预处理,地下导线网平差计算,模拟贯通测量的动态计算,并根据模拟动态观测条件变化,设计预算结果。绘制控制网的图形图像与误差椭圆。以直观的图像方式将模拟贯通误差结果呈现出来。
2、控制网模拟仿真
本模拟仿真软件旨在平面控制网的平差解算以及误差的动态模拟仿真。其中,平面控制网的平差解算包括:方向观测数据与距离观测数据的处理,与其平差计算。数据处理结果将以平面控制网文件、误差椭圆、平差结果文件等形式展示出。误差的动态模拟仿真可以在图形显示的模式下面进行动态增减观测值,或者改变观测值的条件,模拟平面控制网动态结果。
隧道贯通误差仿真系统主要由菜单、工作区、状态栏、工具栏等组成。其中,菜单栏主要包括项目的新建、打开,数据保存、另存、打印等功能。工作区主要是进行模拟结果显示,包括原始数据、平差结果、误差椭圆等显示。状态栏主要显示比例尺、点位坐标等信息。工具栏主要包含常用功能项。
2 控制网平差程序设计
2.1 控制网平差流程
软件各模块运行关系如图2所示。
(1)数据录入、计算点位坐标
该部分主要功能为起算坐标输入,基本观测数据、网型信息等输入,通过对输入数据进行处理,解算待定点概略坐标,供其它模块使用。
(2)方向、边长改正,条件检验
该部分主要通过对输入观测值进行归算,对存在的粗差进行检测,查看数据是否具备平差基本条件,检验合格后可进行下一步计算。
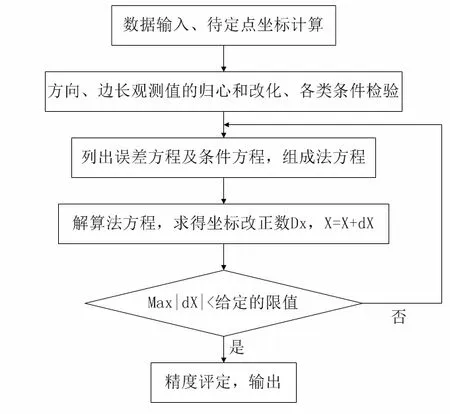
图2 平面控制网平差基本流程
(3)平差模块
该部分主要通过最小二乘原理[1],对观测值进行处理。最终给出平差值,以及控制网的精度。
2.2 贯通测量模拟系统柠条塔煤矿S1210 巷道的应用
贯通测量系统设计完成后,在柠条塔超长巷道贯通测量误差预计及陀螺定向测量数据处理中进行了应用。首先,在贯通误差预计方面,可以使用该系统直观的显示出导线测量各个点位的误差椭圆情况,反映出导线点的精度情况,为贯通测量方案选择优化提供便利,同时可以加入陀螺定向数据进行贯通误差预计,并显示加测陀螺边后导线精度情况。其次,在陀螺定向数据计算方面,使用该软件可以方便的计算陀螺定向数据,实现数据处理的自动化。
2.2.1 贯通测量误差预计程序应用
该系统的使用步骤如下:
1、数据录入。可以采用系统引导,逐步输入方式,也可以采用直接编辑数据文件输入方式。
2、网平差、网图显示、误差椭圆绘制。通过依次点击快捷图标,可以实现网平差、网图显示、误差椭圆绘制,并输出处理结果文件。同时输入结束后可在导线上右击,进行增删观测值等操作。
3、加测陀螺定向数据。加测陀螺定向数据后的贯通误差预计模拟[2],只需要在数据文件中加入固定观测即可,加入后操作过程同过程1、2。
以下图3、图4分别为加测2 条陀螺边贯通误差模拟和加测6 条陀螺边贯通误差模拟的处理情况,通过处理结果可以直观的看出,加测陀螺定向边后误差椭圆明显减小,提高了点位精度。

图3 加测2 条陀螺边贯通误差模拟

图4 加测6 条陀螺边贯通误差模拟
2.2.2 陀螺定向测量程序应用
通过该系统内置的陀螺定向测量计算模块,可以方便的计算陀螺定向成果,主要操作步骤如下:
1、数据录入。可以采用文件输入方式输入数据。
2、陀螺定向测量数据计算。选择工程数据计算选项后可自动进行陀螺定向成果计算。同时,可以使用辅助计算工具进行子午线收敛角计算及坐标反算。
3、成果输出。计算结束后测量成果显示在主显示区,同时输出数据计算结果文件,如图5所示。
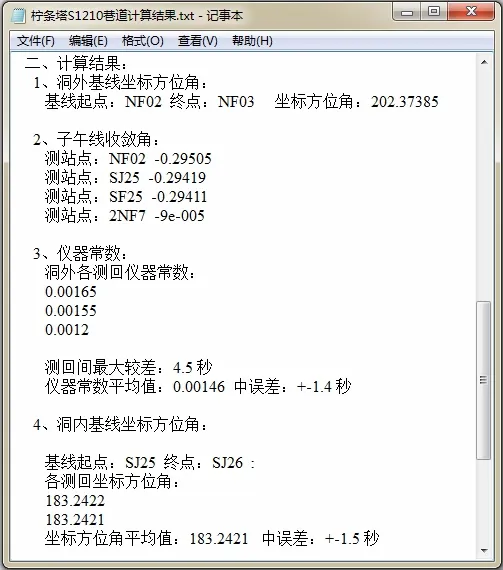
图5 成果输出
通过以上应用可见,贯通测量模拟系统可完成控制网平差计算与贯通测量动态模拟仿真计算。控制网平差计算可以处理方向观测值、距离观测值、以及方位角观测值的平差问题,输出结果包括控制网图形文件(可选误差椭圆)、平差结果文件等。系统中的陀螺定向测量计算模块可以方便的进行陀螺定向测量计算,输出计算结果文件。
