直升机主减半主动反共振隔振技术研究*
2020-08-06王志伟
王志伟, 王 轲, 邓 婷
(南京航空航天大学振动工程研究所 南京,210016)
引 言
直升机的振动与冲击一直是非常突出的问题,直接影响设备的使用性和飞机的寿命等[1]。旋翼的旋转是直升机振动的主要来源,旋翼的载荷通过主减与机身之间安装结构传递到机身上,设计隔振效率高的主减隔振系统,可以降低直升机的振动水平。目前用在直升机上面的隔振方式主要有:聚焦式隔振[2]、非聚焦式隔振、节点梁隔振以及动力反共振隔振。Flannelly[3]提出利用动力反共振原理设计新型隔振器,这一新型隔振器将隔振与吸振巧妙地结合起来,形成具有反共振隔振特征与隔振特点的隔振器,它具有静态刚度大、适合低频隔振、隔振效率与主质量块无关以及反共振点隔振效率高等优点。顾仲权[4]解释了动力反共振隔振器原理,对该种隔振器进行了深入的研究,并提出了以弹性轴承支撑为主的动力反共振隔振器(dynamic anti-resonant vibration isolator,简称DAVI)。宋楚晨[5]结合动力反共振隔振与聚焦式隔振二者的原理,提出一种新型聚焦式DAVI的基本模型。邓婷[6]在隔振系统基础上加入了基于神经网络的控制系统,使得隔振系统能在不同的工作频率下保持较好的隔振效率。
针对现有动力反共振隔振反共振区域频率范围窄、新型高速直升机和无人机转速可变的特点,结合实际设计出新型直升机主减半主动式反共振隔振原理样机和基于神经网络跟频控制的半主动控制方法。根据原理样机作出有限元模型,进行仿真计算得到结构的反共振频率与质量块位置的对应关系。结合人工神经网络预测法,通过设计实验,验证直升机主减隔振半主动控制系统的可行性。
1 主减隔振模型设计与有限元分析
为研究主减隔振系统的隔振性能与控制效果,设计某直升机的原理样机试验模型,并以此为对象开展研究。
1.1 试验模型实体建模
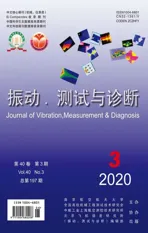
将单向DAVI与聚焦柔性隔振两者结合在一起,前者能对升力方向(z向)的激振力隔振,后者则对旋翼旋转平面内的激振力(x向和y向)隔振。4根主减速器撑杆汇于一虚焦点,整个旋翼与主减速器在x向与y向力作用下能绕虚焦点摆动。根据上述设计思路,对直升机主减隔振系统建立计算机三维模型,如图1所示。
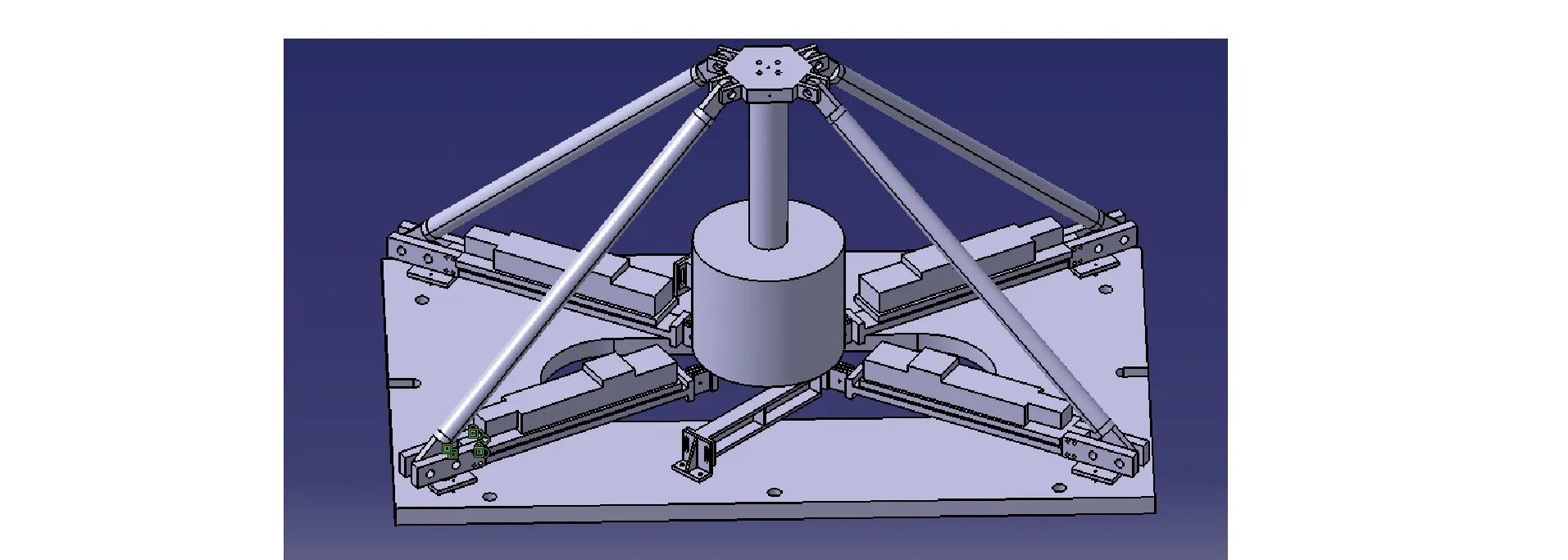
图1 直升机主减隔振系统三维模型Fig.1 Tri-dimensional model of helicopter main vibration isolation system
吸振器不再是单一的质量块,为实现质量块移动,在结构中加入线性模组结构,电机模组组合成吸振器。质量块在模组之上,使用电机控制质量块在模组上移动,如图2所示。

图2 电机模组组合Fig.2 Motor module assembly
1.2 有限元建模
根据实体模型,如图3所示,对直升机主减隔振系统建立有限元模型,建模平台是hypermesh10.0及partran2010。

图3 直升机主减隔振系统的动力学模型Fig.3 Dynamic model of helicopter main vibration isolation system
有限元模型中,以主减底部中心为原点,向右为x轴正方向,向上为z轴正方向,向前为y轴正方向。对于1D单元,每个1D 单元只有沿自身方向的一个局部一维坐标系x1轴。每个1D 单元有绕自身旋转的Rx1方向的自由度和沿着自身伸长和压缩的Ux1方向的自由度。其中质量块用0D Point单元表示,为表达质量块移动,Point单元在模组上每个位置都有表示,但是计算时只有4个设置了属性,有实际意义。撑杆、螺栓等结构用1D Beam单元表示,薄板、连接处耳片等用2D Quad单元表示。长宽相近的固体部分,如电机、模组等,用3D单元Wedge 和Hex表示。
由于研究的主要是z向受力和响应总和,为了便于查看计算支反力结果,将4个支座的底面全部用多点约束(multi-point constrain,简称MPC )中的REB2单元连接到一点,支反力为传递到MPC节点上的力的值,将这一点进行6个自由度的位移约束,模拟将4个支座底面固连在机身上,如图4所示。

图4 模型位移约束Fig.4 Model displacement constraint
1.3 半主动隔振仿真
采用力传递率Tf作为隔振效果的评价指标,它是激振力经过隔振装置时传递到被隔振体上得到的动态力的有效值Fr与源激励Fa有效值的比值
Tf=Fr/Fa
(1)
这里源激励Fa为1kN的力,作用在结构顶部正中央。动态力的有效值Fr由MPC节点(位移约束点)的约束反力表示。加上动力反共振结构自带1%的结构阻尼,利用有限元分析软件对传递到机身结构的传递载荷进行计算。质量块在共振梁正中间时,位移约束点支反力的频率响应计算结果如图5所示。

图5 位移约束点支反力频率响应(默认位置)Fig.5 Displacement constraint point support force frequency response (default position)
由图5可知,以0.1 Hz为间隔,14~21 Hz扫频频率范围内,在19 Hz左右,有一个明显的反共振峰值,此时总支反力为88.19 N,即力传递率为8.82%,极大降低了从旋翼传递到机身的纵向载荷。此位置时的反共振频率为18.9 Hz。
改变质量块位置,质量块在靠近主减最内侧,位移约束点支反力的频率响应计算结果在17.8 Hz左右,有明显的反共振峰值,此时总支反力为101.3N,即力传递率为10.13%,极大降低了从旋翼传递到机身的纵向载荷。此位置时的反共振频率为17.8 Hz。
可以看出,随着质量块位置的改变,系统的反共振频率随着改变,同理可以得到其他位置反共振频率。
2 基于神经网络的跟频控制算法
当外激励的频率发生变化时,为了使隔振器的隔振频率正好是外激励的频率,需要实时调节隔振器滑块的位置。为了使系统始终具有较好的隔振效果,需要提前标定反共振频率对应的质量块位置,并且频率改变时,可以实时识别频率的变化,改变质量块的位置。笔者使用的是基于神经网络的跟频控制算法。
2.1 神经网络数据训练
神经网络在非线性问题处理和数据自学习等方面应用广泛。其中误差反向传播(back propagation network,简称BP)神经网络是最普遍的一种,在信号处理与自动控制等学科得到广泛应用与研究[7-8]。基于频率跟踪算法,在设计控制算法前需要预测或标定隔振系统的动力学特性。对于实际的主减隔振结构,由于结构复杂,势必会有各种各样的误差。因此,反共振频率与质量块位置难以用简单的数学解析式表示。神经网络可以从大量数据中进行学习,找到行为变化规律,实现复杂的因果映射关系。工程中很多问题可以利用BP神经网络,经过训练来预测系统的输出。通过实验测试,得到一定频率范围内结构隔振效率最高的滑块位置。用测试结果作为主动控制样本,利用神经网络预测其他频率下的最优位置。
以激励频率为输入、质量块位置为输出,使用3层BP神经网络进行训练和预测。实际实验中,4个隔振器非完全对称,为单输入多输出神经网络,其中输出分别为4个隔振器中质量块的位置。因此,在训练神经网络进行编程时,采用1输入4输出的形式,选定其中80%的数据为训练样本,剩下20%为预测样本。
根据经验公式[9]
(2)
计算出隐层节点数为4个。训练之后得出权值矩阵,将训练好的神经网络用LabVIEW 子程序表示,如图6所示,从而输入激励频率就可得出质量块应在位置。图6中:x1为输入(频率);y1~y4为输出(4个质量块的位置)。
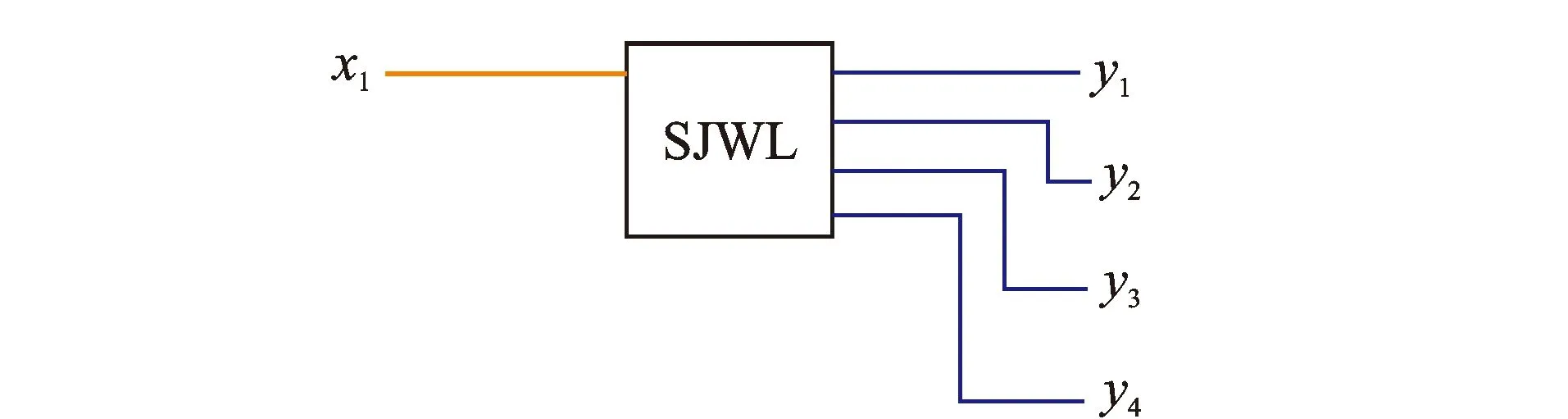
图6 训练好的神经网络LabVIEW子程序Fig.6 Trained neural network LabVIEW subroutine
2.2 频率信息的识别
离散傅里叶变换(discrete Fourier transform,简称DFT)算法具有一定的对谐波分量不敏感的特性,且能较好地抑制非周期分量。使用傅里叶分析来表示信号频谱特性十分有优势。为了抑制频谱测量误差与能量泄露,考虑到频率跟踪精度与速度的问题,这里采用加Hanning窗的DFT频谱修正分析方法提取信号的频率。
对于具有旋转机构的结构,通过测量机体的时域振动信号(可以是加速度信号或者力信号等)来估计激励的频率。
该方法的使用示意图如图7所示。

图7 提取频率信息Fig.7 Extracting frequency information
基于Rife法的频谱修正理论发展至今已十分成熟[10],在LabVIEW 中已有现成的函数可以直接调用,如图8所示,其频率分辨率可达0.01 Hz。

图8 基于Hanning 窗的DFT 频谱修正分析程序Fig.8 DFT spectrum correction analysis program based on Hanning window
该子程序在采集了时域信号之后,输入信号,然后将查找采集到的信号中幅值最高的单一频率,或者在指定的频域内搜寻,最终显示单一频率的频率值、幅值和相位。输入的信号可以是实数或复数、单个通道或多个通道。通过下列方程表示实数单频信号
(3)
通过下列方程表示复数单频信号
(4)
其中:A,fn和φ为表示单频信号的幅值、频率和相位;Fs为输入信号的采样率。
2.3 基于神经网络的跟频控制
通过实验测试,得到滑块在不同位置时隔振装置的反共振频率,从而得到激励频率在一定范围内变化时所对应的结构隔振效率最高的滑块位置。以此测量出的结果作为学习样本,用神经网络预测出其他频率下的最优位置。当得到不同外激励频率下滑块的隔振效率最优位置以后,即可设计基于频率跟踪的半主动控制算法。频率跟踪算法流程如图9所示。

图9 基于频率跟踪算法的主动隔振系统设计流程Fig.9 Design process of active vibration isolation system based on frequency tracking algorithm
综合所需设计实验要求,将神经网络方法和频率跟踪方法相结合,编写出采集信号,自动识别频率的LabVIEW程序。通过识别到的频率,计算出电机的脉冲,从而控制质量块的移动,使得主减隔振系统中的集中质量块可以随着激振频率的改变而在电机的推动下移动位置,帮助隔振器及时恢复较好的隔振效率,从而能在较宽的频带下工作。
3 实验验证
3.1 实验对象及测点
实验对象为根据基于三维模型加工的新型主减隔振系统,如图10所示。
激振部位选择主减顶部,如图11所示。响应点有8个,在隔振系统底部支撑处布置力传感器测量响应。
图12为现场主减结构导轨刻度方向标定示意图。4个导轨上的刻度相对电机的位置是一致的,下面实验中滑块移动从A处移至B处所用刻度即为图中所示标定的刻度。为了方便叙述,给4个模组进行了编号,编号以左下角为1号模组,逆时针逐渐增大编号数字。默认位置为质量块在11 cm处。

图12 现场主减结构导轨刻度方向标定Fig.12 On-site main reduction structure guide rail calibration direction calibration
3.2 主动控制样本测试实验
为获得供神经网络训练的样本数据,进行主动控制样本测试实验。这里用传递率表示系统的隔振效果,传递率的计算公式为
T=|Aresponse|/|Astimulate|
(5)
其中:分子为响应之和的上下幅值的绝对值之和;分母为激励的上下幅值的绝对值之和。
首先,使用Signal Express 软件将激励频率从18 Hz 逐渐增加,考察时域状态下8个响应之和与激励之比,得到默认位置下的反共振频率,以此频率为基准,移动质量块位置,分别得到不同位置下的反共振频率;其次,使用Signal Express 软件分别用得到的反共振频率进行定频激励,移动质量块位置,得到该频率下的最佳隔振效率,即力传递率最低的位置;最后,将各频率与最佳位置一一对应,得到样本数据,从而可以进行神经网络训练。
主动控制样本实验分为两部分:①4个质量块位置移动同步;②质量块位置移动两两同步。当质量块位置同步移动时,以默认位置为例,先以0.1 Hz为间隔进行定频激励,看传递率随激励频率的变化关系,得到21.4 Hz时,传递率最低,达到了53.4%。在以21.4 Hz进行定频激励时,在默认位置附近2 cm进行移动质量块,发现传递率升高,确定21.4 Hz为质量块在默认位置的反共振频率。同理可获得其他位置的反共振频率。
当质量块位置移动不同步时,位置正对的质量块的相位两两相同,因此判断激励频率不变时,1号、3号和2号、4号随质量块位置变化规律相同。所以本实验中1次只移动2个质量块的位置,且质量块的移动方向也相同。初始频率设为21.4 Hz,质量块在默认位置,开始定频激励,将质量块移到12 cm处,再移动到10 cm处,发现10 cm处传递率更低,隔振效果较好;之后移动到9 cm时,传递率又升高。因此当2号、4 号处于10 cm而1号、3 号处于11 cm 时,21.4 Hz 定频激励下,隔振效率达到最小值。实验验证,在小范围内移动1号、3 号质量块位置对力传递率没有任何影响。改变激励频率可以获得反共振频率和质量块位置关系的样本数据。
3.3 神经网络训练
样本数据得出后,用神经网络对样本进行训练。根据样本数据获得的反共振频率与质量块位置关系,只能得出大致的变化规律:①无法涵盖范围内更精确的频率值;②由于它是1个频率与4个位置对应的关系,因此无法用一个函数来描述它们之间的关系,这时可利用神经网络法由反共振频率预测质量块的位置。将样本测试实验数据作为样本数据,其中反共振频率作为输入,4个质量块位置为输出,利用Matlab软件进行神经网络训练。神经网络训练结构如图13所示。
图13 神经网络训练结构Fig.13 Neural network training
经过若干次迭代计算,训练数据误差变化平稳了,训练完成。图14为样本输出与实际输出适应分布图。可以看出,仅在21.3和20.4 Hz时,误差最大为10 mm左右,即在1 cm范围内。由上文的实验可以得出,当质量块在1 cm范围内变动,隔振效率误差在4%以内,因此认为此网络可以使用。
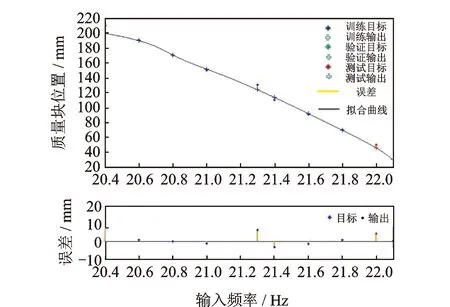
图14 样本输出与实际输出适应分布Fig.14 Sample output and actual output adaptation
由Matlab自带的功能可以得到用权值矩阵表示的神经网络算法语句。将权值矩阵带入训练后的神经网络的LabVIEW子程序,此处将新获得的权值矩阵输入该子程序中,得到一个新的神经网络程序。
3.4 基于神经网络的跟频主动控制实验
本实验中,由机箱的Signal Express发出定频激励信号,然后由笔记本电脑上的LabVIEW程序识别到激励信号的频率,经过神经网络计算出当此激励频率为反共振频率时质量块应在的位置。由此位置和目前所在位置之差,计算出电机驱动质量块移动所需要的脉冲数。计算完成后,电机驱动质量块移动到目标位置。改变激励频率之后,系统可以自动识别新的激励频率,并且及时移动质量块,以保证隔振系统能一直保持在高效隔振状态下。
随机选择2个频率做定频激励,以20.8 Hz和21.6 Hz为例,在实验过程中,初始激励频率设置为20.8 Hz,待质量块移动后,等待信号稳定,随后将激励频率改变为21.6 Hz。整个实验过程的时域响应曲线如图15所示。
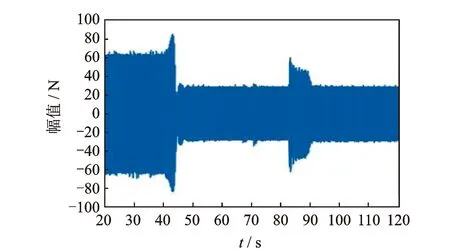
图15 时域响应Fig.15 Time domain response
由图中可看出,初始时激励频率为20.8 Hz,刚开始时质量块处于初始位置,此时响应之和的幅值十分大。打开跟频控制程序后,在40 s 时,系统识别到激励频率,计算出电机的脉冲后,控制质量块移动到目标位置;在45 s 时,隔振效率大幅提高;到82 s左右,改变激励频率至21.6 Hz,响应之和的幅值又大幅增大,隔振效率大幅下降;当90 s 前,系统再次识别到实时激励频率,计算出脉冲数后,大约经过2 s,驱动质量块到达了新的目标位置,此时响应之和的幅值又大幅下降了,隔振效率增加。
多组实验结果得出,本实验中的主动控制程序可以很好地识别激励频率,然后根据预测的结果,控制质量块移动至指定的位置,使得整个系统可以长时间保持在有隔振效果的情况下。
4 结束语
在现有直升机动力反共振隔振主减隔振和主动控制理论的基础上,以直升机原理样机为研究对象,加入基于神经网络的跟频控制方法。仿真和实验表明,新型隔振控制方法系统可以使主减隔振系统随着频率变化始终有隔振效果。实验结果与仿真结果对比发现,实验隔振效率较仿真低。在后面的研究中可分析造成效率不佳的原因,予以修正。