质子旋进式海洋地磁日变站的设计与实现
2020-08-05李先锋郑彦鹏华清峰刘凯马龙张林清
李先锋郑彦鹏*华清峰刘 凯马 龙张林清
(1.自然资源部 第一海洋研究所,山东 青岛266061;2.自然资源部 海洋地质与成矿作用重点实验室,山东 青岛266061;3.青岛海洋科学与技术试点国家实验室 海洋地质过程与环境功能实验室,山东 青岛266061)
质子旋进式磁力仪作为应用较为普遍的地磁测量仪器,已被广泛用于资源勘查、工程勘察和地磁日变观测等领域[1-2]。海洋地磁日变作为海洋地磁测量中最主要的误差源之一,地磁日变测量的数据质量对于提高海洋地磁测量数据的精度至关重要[3-5]。根据海洋调查规范有关海洋地磁测量的要求,地磁日变站的有效控制范围<300 km[6-7],对于深远海地区,由于远离大陆,海洋地磁测量期间只能就近布设海洋地磁日变站以获得有效的地磁日变观测值。
目前,全球仅加拿大Marine Magnetics公司实现了海洋地磁日变站的商业化,在远海地磁调查中国内普遍使用该公司的Sentinel地磁日变站,但该仪器自身不具备自动回收功能,需采用潜标的作业方式:将Sentinel地磁日变站固定在凯夫拉绳上,其上连接浮球,其下连接声学释放器和承重块,整套系统投放到海底,在回收时使用声学释放器抛掉承重块,利用浮球的浮力将仪器浮到海面进行回收。而投放潜标需要的部件较多,操作复杂,一旦某些操作细节被忽略会造成设备损坏、回收失败甚至设备丢失,导致地磁日变数据的缺失,进而影响海洋地磁测量的数据精度[8]。另外,Sentinel地磁日变站还存在电池容量有限、无状态监测信息等问题,在海上使用过程中,极易出现突然中断工作的情况且事后无法获知具体的故障原因。因此,亟需设计一套便携式海洋地磁日变站以简化海上作业方式,并能满足海上地磁日变测量的精度要求。
前人研究表明,采用高集成度的电子器件和数据算法可以提高地磁测量的数据精度[9-10],本文基于质子旋进式地磁测量工作原理,采用一体化结构设计思路,将地磁测量、声学释放器、耐压舱、浮球和承重块等集成为一体,设计并研制了一套新型海洋地磁日变站。其具有小巧便携,海上操作、投放和回收简单的优点,并且测量精度能满足海洋地磁测量的精度要求。
1 质子旋进式地磁测量工作原理
质子旋进式地磁测量的工作原理是利用静态激发质子在地磁场内的拉莫尔进动效应测量地磁场[11]。质子旋进式地磁传感器由无磁性的保护外壳、富含氢的液体(酒精、煤油等)和置于其中的线圈组成[12],当地磁传感器未受到外界磁场作用时,液体的质子磁矩指向无规则性,不表现宏观磁矩。当受到外界垂直于地磁场T方向的磁场H0时,液体的质子磁矩将按外界磁场H0方向排列(图1a),这被称为极化过程[13-16]。当切断外界磁场H0,则地磁场对质子有μp×T的力矩作用,试图将质子拉回到地磁场方向。质子在自旋和地磁场H对其力矩作用下,质子磁矩μp将绕着地磁场T的方向做旋进运动(图1b),称为拉莫尔旋进[13-16]。
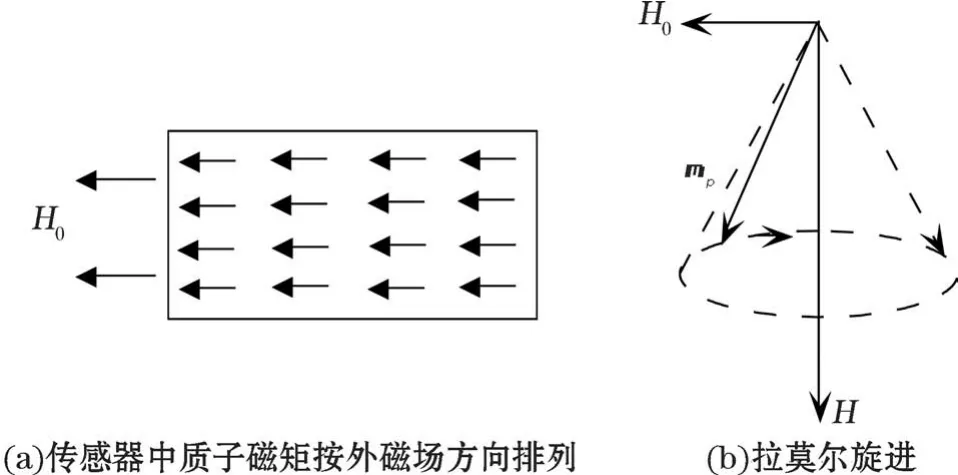
图1 质子旋进示意图Fig.1 Schematic diagram of proton precession
理论研究表明,质子旋进的角速度ω与地磁场H的关系:

式中:γp为质子磁旋比[10],γp=2.675 12×108H-1·s-1。
又因ω=2πf,则有:

式中:H的单位为n T。该式表明,只要准确测量拉莫尔旋进信号的频率f,乘以常数,就能得到地磁场的值[10]。
由于地磁场很微弱,并且被测的拉莫尔旋进信号的幅度具有衰减性,为测得旋进信号的频率f,通常采用预极化方法来建立质子宏观磁矩,以增强信号的幅度。具体做法:1)用圆柱形的无磁性容器装满富含氢的液体(酒精、煤油等),在容器的周围绕上极化线圈和测量线圈(或共用一个线圈),使线圈轴向垂直于地磁场H方向;2)给线圈通电流,使其内产生沿线圈方向n×104A/m的极化磁场H0,其方向沿线圈方向,在极化磁场作用下,容器内液体中质子磁矩沿极化磁场方向排列,形成宏观磁矩;3)切断电流,质子磁矩以拉莫尔旋进频率绕地磁场旋进并切割线圈,使线圈环绕面积中的磁通量发生变化而产生感应电动势;4)通过测量感应电压的频率,即可测出地磁场H的值[13-16]。
2 仪器系统设计与研制
本文设计与研制的海洋地磁日变站主要由耐压舱、主控制系统、地磁传感器及测量单元、声学释放系统(含换能器、声学应答和执行电路、释放装置)、电池组、承重块等组成。除声学换能器和释放装置外,仪器的所有电路部分均放置于直径17 in、耐压6 000 m水深的玻璃浮球中,玻璃浮球作为仪器的耐压舱,同时为仪器回收提供浮力;将地磁传感器单独放置于用钛合金加工的耐压舱中,并用钛合金杆将其固定在玻璃浮球保护外壳上以减少仪器电池及电路部分对地磁传感器的干扰。声学换能器固定在浮球保护外壳的正上方、传感器的下方,减小声信号接收盲区;释放装置固定在浮球保护壳的正下方与承重块连接。仪器内部与外部(如声学换能器、释放装置)的连接、充电、数据下载等均通过水密接插件和水密线连接。仪器的整体结构及关键组成部分见图2。
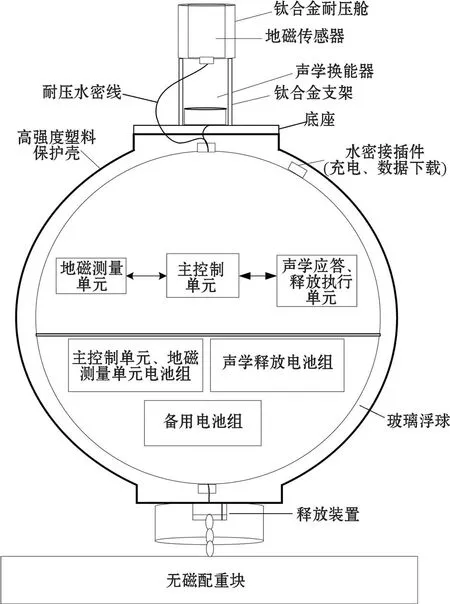
图2 海洋地磁日变站结构Fig.2 Schematic diagram of marine geomagnetic base station

图3 主控制系统结构Fig.3 Schematic diagram of main control system
2.1 主控制系统
主控制系统为仪器的核心,采用低功耗、高性能的32位微处理器,具有丰富的外设和数据处理能力,能够方便地实现外围器件的控制和功能扩展。由图3可知,主控制系统的功能包括:1)地磁场测量,控制极化电路极化地磁传感器产生拉莫尔旋进信号,测量并获取地磁场值;2)数据传输及存储,仪器工作前,通过无线传输获取工作参数并返回仪器状态信息,使用内置GPS模块校准仪器时间;仪器工作中,将地磁场数据存储在低功耗的非易失性存储器中;工作结束后,通过USB将数据传输给外部;3)状态监测,仪器在工作时,定时对玻璃耐压舱的气压、温度、电池电压、声学释放执行单元状态等进行检测,用来监测仪器密封性、电池电量和释放状态等并写入日志文件;4)电源管理,为了提高仪器的可靠性,仪器使用3组电池:声学释放系统使用单独的电池组以保证仪器回收的成功率;仪器正常工作时,使用主控制系统、地磁测量单元电池组;当主控制系统检测到此电池的电压低于设定值时,关闭地磁测量单元并使用备用电池以保证主控制系统的正常运行;5)仪器定时释放,为了提高仪器的可靠性,设计了定时释放功能。仪器在下水前设置定时释放时间,当定时释放时间到达时,主控制系统将发送释放信号给释放执行电路实现仪器的自动回收。并且仪器在释放时,释放执行电路产生脉冲信号并发送给主控制系统,主控制系统打开GPS、无线传输模块和信号灯。无线传输模块将仪器到达海面时的GPS位置发送给船上接收端进行仪器定位,信号灯便于夜间寻找。其中,无线传输采用低功耗、传输距离远的Lora通讯技术,最大传输距离10 km,可以满足海上搜寻要求。
2.2 地磁测量单元
地磁测量单元主要由地磁传感器、极化电路、配谐电路、前置放大、信号调理电路和频率计组成(图4)。主控制系统控制地磁测量单元的极化电路为地磁传感器提供约0.85 A的短时间极化直流脉冲电流;通过采用快速开关,能在一个周期的拉莫尔旋进信号中快速地关断电流而不影响信号的测量。地磁传感器产生的拉莫尔旋进信号进入配谐电路进行选频放大,经过滤波、放大等信号调理后,依次进入高精度频率计和ADC,利用频率计获取高精度的地磁场值,利用ADC获取拉莫尔旋进信号进行峰值检测,使用快速跟踪算法实现仪器测量量程内的自动配谐[15]。
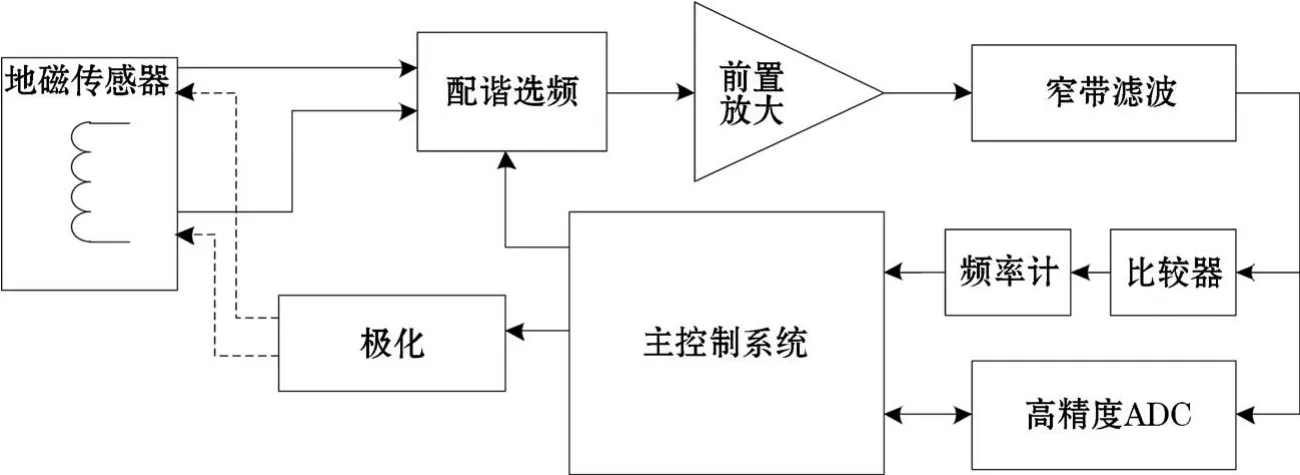
图4 地磁测量单元结构Fig.4 Schematic diagram of geomagnetic measurement unit
地磁传感器通过极化产生的μV级拉莫尔旋进信号经过串联谐振电路获取信噪比较高的原始信号,通过前置放大将微弱信号放大到比较器的门限电压,经过窄带滤波器滤除通频带的谐波干扰和减少毛刺,提高信噪比[16]。然后信号分为2路:一路信号进入比较器转换成相同频率的方波,再进入频率计测量频率;另一路信号进入高精度ADC进行峰值检测[14]。
频率计是地磁测量单元的关键,本仪器采用多周期同步测量法提高测频精度[17]。设输入信号频率为fx,时钟基准信号频率为fs,2个计数器A和计数器B在同一闸门时间t分别对fs和fs进行计数,计数器A和计数器B的值分别为Nx和,则输入信号频率fx和周期Tx分别为:

式中:t=1/fs。Nx无(±1)量化误差,Ns有(±1)量化误差,由于fs很高,所以Ns的量化误差的相对值(±1/Ns)很小,且与被测频率fx无关[18-19],因此,在整个测频范围内,能够实现等精度测量,选用集成有PLL模块的高性能、高集成度的FPGA芯片对外部高频率的晶振倍频获得更高的基准频率。
为了进一步提高测量精度,在每个极化周期测量过程中,采用线性插值的过零数频方法[20],充分利用FPGA并行处理能力,10个通道同步采集拉莫尔旋进信号频率和基准时钟频率值取平均值。
2.3 声学释放系统
声学释放系统由声学换能器、声学应答及释放执行电路、金属熔断丝和释放装置等组成。声学应答是仪器实现回收的关键部件[21],声学应答电路采用8位FSK数字编码,如果输入信号频率1,则编码解调电路输出为低电平,如果输入信号频率2则为高电平,释放执行电路进入工作,其原理如图5。FSK编码用以检测信号中是否含有对应的频率信号,由于不需要计算全部DFT系数,而只需要计算这2个频率上的系数,故采用Goertzel算法,该算法一次仅计算一个频率点的傅里叶分量,可以实现更高的计算效率[22-23],Goertzel算法流程如图6所示。

图5 声学应答、执行电路原理Fig.5 Schematic diagram of acoustic response and execution circuit
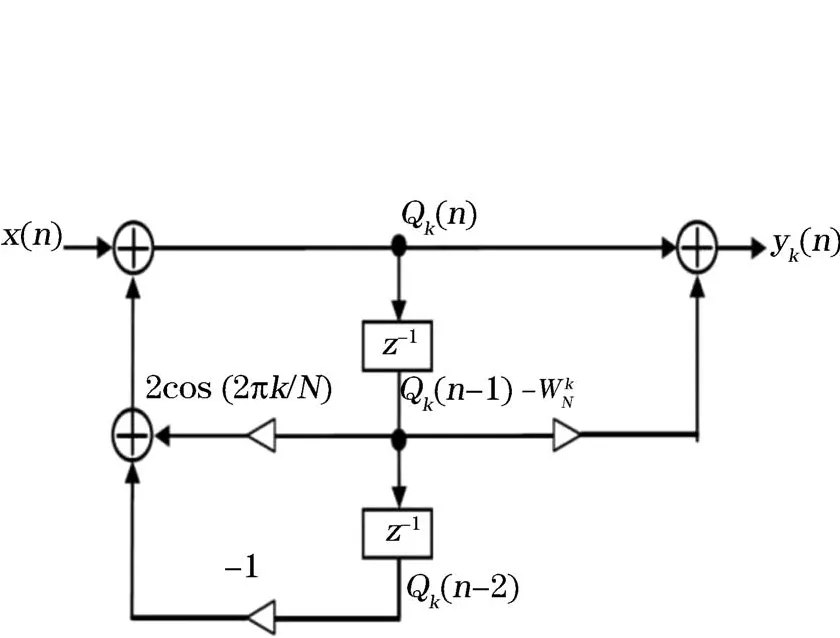
图6 Goertzel算法流程Fig.6 Flow chart of Goertzel algorithm
释放装置包括耐腐蚀的圆形和方形尼龙块、绕线柱、活动承重杆及正、负电极。其中,用螺钉将圆形尼龙块固定在高强度塑料保护外壳的下部,方环形尼龙块固定在圆形尼龙块上,其中一面有2个接线柱用做正、负电极分别与金属熔断丝两端连接。在活动承重杆上加挂无磁性承重块,将金属熔断丝缠绕正、负电极和绕线柱,再在正极处压紧,承重块将和仪器固定在一起。
当仪器收到船上甲板单元发送的释放命令或仪器设置的自动回收时间到达时,声学应答单元将启动释放执行电路给释放装置通电并打开信号灯,同时反馈给主控制系统同步打开GPS和Lora无线通讯模块。金属熔断丝在海水的作用下发生电化学腐蚀,5~10 min后断裂,活动承重杆脱落,仪器与承重块分离,仪器在玻璃浮球浮力的作用下浮到海面,通过信号灯、无线传输模块传回的仪器GPS位置回收仪器。
3 试验及结果分析
3.1 陆地对比测试
为了验证仪器地磁测量的性能,将本文研制的仪器与加拿大的Sentinel地磁日变站在青岛某地进行了室外对比测试。在测试前对测试区域进行测量,选择磁场干扰和梯度变化小的地点。为避免仪器间的相互干扰,2台仪器相距5 m(图7a),在工作前,对仪器进行时间同步校准,每隔10 s测量一次数据,记录同一段时间内的地磁场测量值并计算仪器的测量精度。测量精度ε计算式[24]为:

式中:Hi为磁力仪第i次测量值,为一组测量值的算术平均值,n为测量次数。
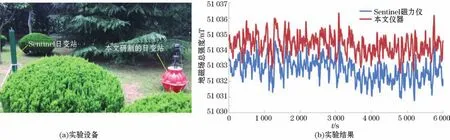
图7 陆地对比测试Fig.7 Outdoor comparison test
由图7可知,2台仪器测得的地磁场数值曲线变化几乎一致,变化趋势大致相同。通过计算各自的平均值以消除2台仪器安放点不同引起的磁场测量固定差值,然后分别做均方差处理。经计算Sentinel地磁日变站的精度为0.193 n T,本文仪器精度为0.239 n T。另外选取两组数据,第1组为图7b中横轴为2 000附近的100个样本点,第2组为横轴5 000附近100个样本点,经计算Sentinel地磁日变站的精度为0.191 n T和0.195 n T,本仪器的精度分别为0.237 n T和0.242 n T,两台仪器均方差差值计算结果均为0.05 n T左右。证明本仪器测量精度良好,接近商业地磁日变站的测量精度。
另外,为了验证仪器声学释放系统的功能和可靠性,分别在室内水槽和码头做了多次释放试验,均能成功通讯和释放,证明声学释放系统工作正常,能保证仪器的顺利回收。
3.2 海上试验
为了验证仪器的整体性能,于2018-01搭载“向阳红01”船在南极某海域进行了海上试验,试验海域水深2 436 m,仪器每隔1 min测量一次。为防止仪器在投放过程中与Sentinel地磁日变站潜标系统发生碰撞,2台仪器的投放点距离500 m。仪器于2018-01-06布放,2018-01-28成功回收,仪器回收后发现Sentinel地磁日变站测量的数据跳动超出正常变化范围(>1 000 n T)且无规律,该数据无法正常使用,本文仪器测量数据正常,数据结果见图8。
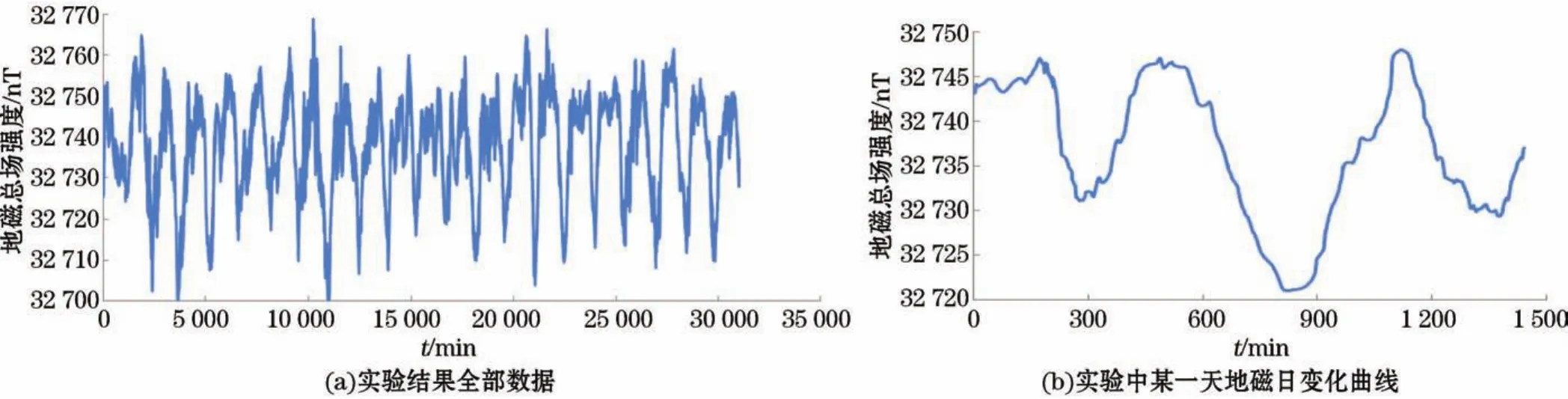
图8 海上实验结果Fig.8 The experiment results at sea
由图8a可知,本文仪器测量的地磁场数据连续,无明显跳点;抽取其中某一天的数据,从图8b可以看出,本文仪器测量的地磁场数据平缓,无明显毛刺和跳点,稳定性较好。经计算本文仪器的精度,整个试验期间数据的精度为0.273 n T,图8b某一天数据的精度为0.212 n T,经分析是由于海上试验地点位于高纬度地区,地磁日变化剧烈,测量的地磁场数值日均值变化大,导致长周期测量的精度较短周期测量的精度差。但本文仪器能较好地反映该地区地磁日变化特点,且长期测量的精度满足海上地磁测量的精度要求。但本文仪器能较好地反映该地区地磁日变化特点,且长期测量的精度满足海上地磁测量的精度要求。
4 结 语
基于质子旋进式地磁测量的工作原理,采用一体化结构的设计思路,设计并研制了一套质子旋进式海洋地磁日变站,实现了测量单元与声学释放系统独立工作,保证了海上作业的便携性和可靠性。通过与商业仪器的陆地对比测试和海上试验,验证了仪器测量性能可以满足设计要求,能有效提高海上作业效率、降低劳动强度。本研究工作可为海洋地磁日变站的进一步发展提供参考,从而促进我国关键仪器设备国产化的进程。