华龙一号堆芯测量探测器组件缩容装置控制系统硬件设计
2020-08-04张安锐罗英安彦波殷琪张弦
张安锐 罗英 安彦波 殷琪 张弦


摘 要
本文对华龙一号辐照后探测器组件缩容装置控制系统技术进行了研究,针对缩容装置控制提出了技术方案,利用星型与环型结合的拓扑优化结构的思想有效地解决了系统分散布置通信问题。本文主要介绍该缩容装置控制系统硬件的方案设计、核心设计思想以及硬件选型及配置情况。试验结果表明,本控制系统硬件设计可靠、性能稳定、控制精度高。
关键词
华龙一号;探测器组件;缩容装置;控制
中图分类号: TL503 文献标识码: A
DOI:10.19694/j.cnki.issn2095-2457.2020.15.033
Abstract
This paper studies the control system technology of the shrinkage device of the detector snatch after the irradiation of Hualong No.1,and proposes a technical solution for the control of the shrinkage device.The idea of topology optimization structure combining star and ring is used to effectively solve the problem of distributed communication in the system. This article mainly introduces the scheme design,core design ideas, hardware selection and configuration of the control system hardware of the shrinkage device.The test results show that the hardware design of the control system is reliable,the performance is stable,and the control accuracy is high.
Key Words
Hualong No.1;Detector snatch;Shrinkage device;Control
0 引言
華龙一号堆型采用了新型堆芯测量系统,探测器组件从堆顶引出,且需要在两个换料周期进行更换,为此研制了“华龙一号”堆芯测量探测器组件缩容装置解决上述问题。
探测器组件缩容装置是一项机电一体化设备,可在程序控制下自主完成待拆除探测器组件定位、剪切、卷绕等一系列动作。
探测器组件缩容装置的主要结构包括:视觉对中装置及监控系统、大小车本体装置、屏蔽门、剪切卷绕装置、暂存容器装置等。
探测器组件缩容装置的工作原理如下:
1)利用视觉对中装置及监控系统对探测器组件进行精确定位;
2)利用大小车本体装置在平面上移动并精确到位;
3)利用探测器组件抓具抓取探测器组件;
4)利用剪切卷绕装置将探测器组件进行剪切以及卷绕成型操作;
5)利用暂存容器装置将探测器组件绕卷储存。
研制的探测器组件缩容装置控制系统解决了缩容装置控制功能复杂,通信数据量大、系统本身实时性要求较高等问题。经试验验证,该控制系统运行高效、控制精度高、可靠性高。本文对缩容装置控制系统的硬件组成、设计方案以及配置情况进行简要介绍。
1 缩容装置控制系统总体技术方案与设计思想
1.1 控制系统总体技术方案
缩容装置控制系统采用分布集中控制,控制系统架构如图1所示。可以分为上位机层、控制器层以及执行部件层三层:
1)缩容装置控制系统上位机层:上位机监控系统采用SIM ATIC机架式工控机,主要完成:图像采集及处理、缩容逻辑控制及人机交互等。该层控制的特点是处理的数据多,速度快,但实时性要求不高。
2)缩容装置控制系统控制器层:特点是处理的数据相对较少,但对实时性、可靠性要求高。将运动控制层又分为两个部分:大小车运动控制器及剪切卷绕运动控制器。控制器采用西门子1500系列PLC控制器。
3)缩容装置控制系统执行部件层:包括各类伺服电机驱动器及电磁阀等。
工作时,工控机与运动控制器通过工业以太网进行通讯。上下位机电缆可快速插拔。电缆卷绕在可卷盘上,卷盘可自动收线。缩容装置控制系统总体技术方案见图1。
控制系统主要由工控机、运动控制器、操作显示屏、监控屏、屏蔽门模块、暂存容器模块、大车模块、小车模块、剪切模块、卷绕模块、压紧模块、箱体导轨模块、随动保持模块、各模块驱动的电机或气缸、监控相机及人机操作平台等组成。
操作显示器用于完成人机交互功能;监控显示器将监控相机的图像实时显示在屏幕上;屏蔽门模块主要通过气缸作用完成屏蔽门的开合并实现辐照屏蔽功能;大小车模块主要实现平面的平移定位,通过滑轨以及伺服电机实现;暂存容器模块实现探测器组件绕卷的暂时存储;剪切模块实现探测器组件的剪切操作;卷绕模块实现探测器组件的卷绕操作;压辊模块实现卷绕过程中对探测器组件径向压紧限位;箱体导轨模块实现箱体整体移动功能;随动保持模块实现卷绕过程中探测器组件与卷绕轴保持垂直角度。
1.2 控制系统硬件设计思想——基于总线的分布控制系统
1.2.1 控制结构模块化
整个系统采用模块化设计理念,系统功能分解,减少维护时间。由于该缩容装置系统经需求分析后发现,需要借助多个系统协同完成功能实现。所以,为了能提高系统稳定性以及可靠性,在控制系统硬件设计层面采用模块化思想,将主要的功能抽象独立成单独模块,从而降低模块之间的耦合与干扰。
比如,起到定位作用的大小车本体控制系统、负责剪切卷绕的剪切卷绕装置控制系统都分别独立使用一个PLC进行下位机的控制,从而提高整个系统控制的可靠性以及效率。
1.2.2 通信结构拓扑优化
由于本系统控制模块众多、具有实时控制性要求并且具备高精度的视觉对中装置及监控系统,对于数据交互提出了更高的要求。为了满足数据交互实时性的需要,对于传统的通信结构进行拓扑优化,采用了环形+星型的通信结构解决方案:相距较近的子系统利用交换机作为信息交互的媒介,实现数据快速交互;对于相距较远的子系统之间利用千兆电气端口实现交换机之间的信息交互。从而实现了系统的实时信息的需求。在操作区和设备本体上设置两台交换机,分别实现对于现场设备的信息采集以及操作区设备的信息采集,并通过两个交换机之间的千兆电气端口实现交换机之间的通信。
2 缩容装置控制系统硬件设计
缩容装置控制系统主要由缩容装置操作控制系统、大小车本体控制系统、剪切卷绕装置控制系统、视觉对中装置及监控系统等组成,见图2。
缩容装置控制系统涉及3台PLC系统、1个工控机、1个监控主机及3个摄像机,故设计了小型局域网解决各控制系统间的数据传输。局域网结构根据各控制系统物理位置特点采用星型+环形的拓扑结构,即:布置在相近位置的系统通过交换机连成星型网络,交换机为该星型网络数据交换中心;布置在不同位置的星形网络再连成环型网。
2.1 缩容装置操作控制系统
缩容装置操作控制装置主要完成人机交互、图像处理及总体运动协调等功能。控制系统由西门子SIMATIC机架式工控机IPC1、交换机、监控主机IPC2、监控显示器、PLC分布式远程输入/输出模块、操作面板及其他低压元器件等组成,其主要元器件安装在操作控制柜中。使用时,操作控制柜布置在构件水池旁+16.5m平台上。
缩容装置操作控制内网络结构见图3。
工控机IPC1采用西门子机架式工控机, PLC分布式ET 200系列远程输入/输出模块通过通信接口模块连至交换机上。
交换机采用西门子SCALANCE X300系列交换机,该交换机含一个千兆级电气端口,七个高速以太网端口和两个千兆级多模玻璃纤维光学端口,在星型网内部,各主机及PLC通过高速以太网端口连至交换机;环型网各交换机通过千兆级多模玻璃纤维光学端口连接。
2.2 缩容装置大小车本体控制系统
大小车本体控制系统以西门子S7 CPU 1500系列控制器为核心,通过触摸屏和I/O模块输入指令,由控制器进行逻辑处理后控制三台伺服驱动器,其中一台伺服驱动器控制小车的伺服电机,实现X方向的运动;另外两台控制大车的两个伺服电机同步运动,实现Y方向运动。
大车轨道两侧装有兩套编码器,用于测量大车的实际位置;小车轨道一侧装有一套编码器,用于测量小车的实际运动位置。使用时,编码器位置信号接入控制器用于判断传动系统是否正常、大小车是否运动到位及大车两端位置是否同步。
大小车本体控制系统主要由控制柜、电缆及现场伺服电机、编码器、传感器等组成。控制柜内包含操作面板、触摸屏、S7-1500系列控制器、ET200系列分布式远程输入/输出模块、编码器信号处理单元、伺服驱动器、电源模块、按钮、旋钮、手动操纵杆、电缆、电源开关等。
系统采用西门子S7 CPU 1500系列控制器。PLC分布式ET200系列远程输入/输出模块通过通信接口模块连至交换机上。
大车两个伺服电机、小车一个伺服电机与变频器连接后通过变频器的PROFINET接口连接至交换机从而与同样以PROFINET方式连接至交换机的PLC实现通信。
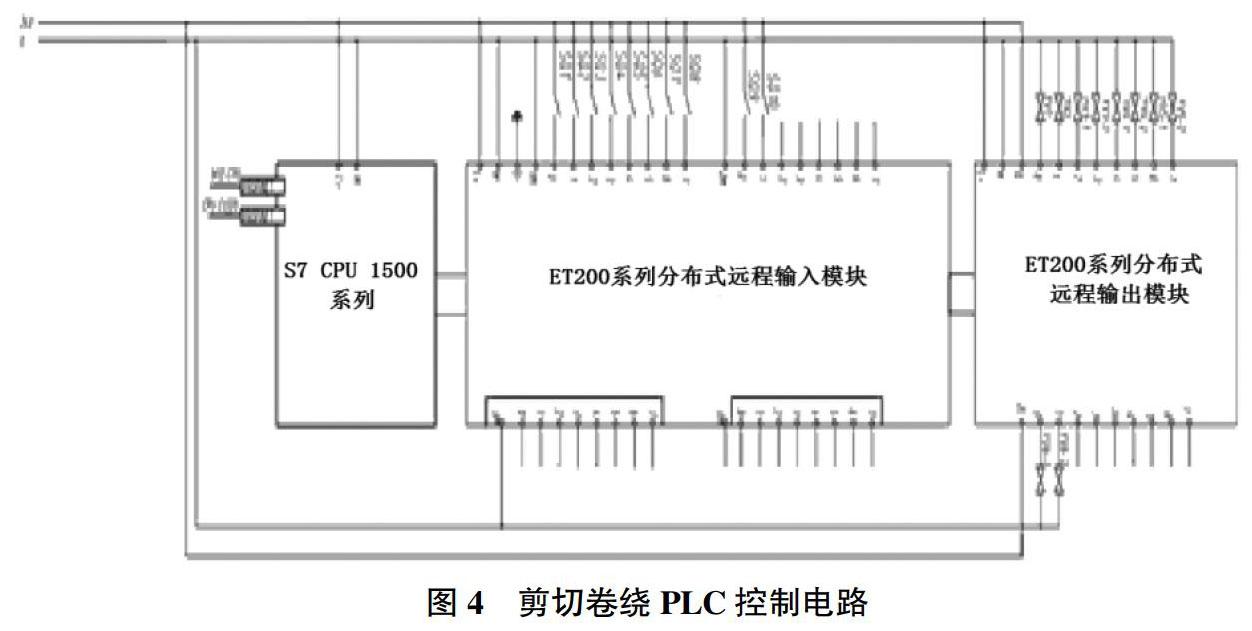
2.3 缩容装置剪切卷绕控制系统
PLC在系统中负责采集、分析各个输入信号,并输出控制信号驱动主电路进而控制各负载执行相应动作达到控制目标。PLC的选型主要根据系统输入/输出点数的多少来选择[2]。考虑到本系统的输入信号及输出信号数量,本系统中选择德国西门子公司S7 1500系列作为控制器。该PLC可采用交流100~240V电源供电,稳定性很好,输出形式为继电器输出,能满足本控制系统的设计要求。
剪切卷绕控制系统主要由西门子S7 CPU 1500系列控制器、ET200系列分布式远程输入/输出模块、伺服驱动器、气动控制回路、开关电源、各类传感器及其他低压元器件等组成。其控制电路见图4。
伺服驱动器采用西门子S120系列驱动系统。SINAMICS120驱动系统由一个控制单元、一个调节型电源模块、一个1.6kW的单轴电机模块、一个4.8kW的单轴电机模块及两个2.7kW的双轴电机模块组成。各电机模块通过串行总线与控制单元连成环形网络,并最终通过控制单元的PROFINET接口与PLC通讯。
气动控制回路由一个过滤器、两个减压阀、两个二位五通单电控电磁阀及四个二位五通双电控电磁阀组成,见图5。
2.4 缩容装置视觉对中装置及监控系统
视觉对中装置及监控系统包含三个水下耐辐照摄像机及两盏大灯等,三个摄像机通过以太网将图像数据传输给交换机,交换机再通过千兆以太网口传输给操作控制柜中的交换机,其连接电路见图6。
3 结论与展望
本文从缩容装置研制的实际需求背景出发,依次介绍了缩容装置控制系统总体技术方案以及主要设计思想,并对缩容装置操作控制装置、大小车本体控制系统、剪切卷绕装置控制系统、视觉对中装置及监控系统等子系统都进行了详细的介绍和阐述。该装置的研制成功填补了三代核电站探测器组件拆除领域的技术空白,对提高核电经济性和安全性具有重要意义。
参考文献
[1]张争刚,熊刚.基于PLC的工业洗衣机控制系统设计[J].电子设计工程,2016,24(24):78-81.
[2]刘丽贞.基于PLC的两侧缸位置同步控制系统设计[J].沧州师范学院学报,20 18,34(01):38-40.
[3]李雅静,孟慧,张小青.基于PLC控制系统的温室灌溉系统设计[J].机械工程与自动化,2018(06):165-166.
[4]周永欣,马文斌.六自由工业机器人控制系统硬件设计[J].电子世界,2017(02):154-155.
[5]闫宇田.通过PLC控制交通灯系统硬件设计[J].山西电子技术,2019(03):13-14.
[6]姚伟浩.重介质选煤PLC控制系统硬件设计[J].自动化应用,2019(03):25-26.
[7]汪洁.基于PLC的双温冷库自动控制系统硬件设计[J].南方农机,2019,50(24):136-137.
[8]杨淳清.基于嵌入式的Zigbee无线传感智能家居系统硬件设计[J].电子技术与软件工程,2019(03):164.
