工业CT原位加载装置压力信号采集系统
2020-08-03杨彦从卢其威张文琪司凯彭瑞东
杨彦从 卢其威 张文琪 司凯 彭瑞东

摘 要: 为了避免旋转扫描过程中加载装置压力传感器外接连线带来的缠绕和遮挡问题,基于ARM技术和WiFi技术给出了一种无线数据采集方案,实现了工业CT原位加载扫描实验中加载装置压力信号的实时采集。整个采集系统由下位机、无线路由器、上位机三部分组成。下位机安装在加载装置上,采用ARM系统搭建,电池供电。压力变送器信号经调理后通过ARM主控芯片模拟输入端采集。利用WiFi模块与路由器通过无线连接,路由器再与上位机通过网线连接,从而实现下位机与上位机的P2P网络连接。数据传输采用UDP协议,自定义数据包格式中包含了采样时间和各通道A/D数据。上位机放置于CT监控室,接收网络UDP数据包,解析数据后进行显示和存储。实验测试结果表明,该系统工作稳定可靠,操作方便直观,完全满足静态加载的数据采集需求。
关键词: 工业CT; 原位加载; 信号采集; 系统设计; 无线传输; 远程通信
中图分类号: TN911?34; TP393.17; TP274 文献标识码: A 文章编号: 1004?373X(2020)06?0018?05
Pressure signal acquisition system for in?situ loading devices in industrial CT
YANG Yancong1, LU Qiwei1, ZHANG Wenqi1, SI Kai2, PENG Ruidong2
(1. School of Mechanical Electronic and Information Engineering, China University of Mining and Technology, Beijing 100083, China; 2. State Key Laboratory of Coal Resources and Safe Mining, China University of Mining and Technology, Beijing 100083, China)
Abstract: In order to avoid the problem of entanglement and shielding caused by external connection of pressure sensor of loading device during rotating scanning, a wireless data acquisition scheme based on ARM technology and WiFi technology is proposed, which realizes the real?time acquisition of pressure signal of loading device in industrial CT in?situ loading scanning experiment. The whole acquisition system is composed of slave computer, wireless router and upper computer. The lower computer is installed on the loading device, which is built with ARM system and powered by batteries. After conditioning, the signal of pressure transmitter is collected by the analog input terminal of arm main control chip. The WiFi module is used to connect with router through wireless connection, and router is connected with upper computer through network cable, so as to realize P2P network connection between lower computer and upper computer. The UDP protocol is adopted for data transmission, and the format of customized data packet includes sampling time and A/D data of each channel. The upper computer placed in the CT monitoring room receives the network UDP packets, analyzes the data and displays and stores them. The experimental results show that the system is stable and reliable, and easy to operate. It fully meets the data acquisition requirements in static loading test.
Keywords: industrial CT; in?situ loading; signal acquisition; system design; wireless transmission; remote communication
0 引 言
自R?ntgen发现X射线之后,Cormack和Hounsfield进一步发明了医用CT,从而开启了利用X射线穿透物体之后的衰减特性进行物质检测的方法。随着计算机技术的迅猛发展,现在计算机X射线层析扫描(Computed Tomography,CT)技术已经成为一种非常重要的实验技术手段,在医疗诊断、工业检测以及科学研究等领域有着广泛的作用,是进行材料内部结构无损检测的主要方法[1]。围绕CT实验技术,在图像重建算法、扫描成像方式、信噪比增强等方面都取得了很大进展,不断改进了CT系统的成像质量[2],并且融入到实践教学中[3]。值得关注的是,通过将传统CT技术与传统力学加载测试技术相结合,这就极大地拓展了CT的应用领域,不仅可以精确观测材料内部的组织结构,而且实现了原位加载下材料内部结构演化的实时观测,为研究材料变形破坏、流体渗透驱替等过程的微细观机制提供了实验支持[4?5]。
国内最早实现这一技术创新的是中国科学院兰州冰川冻土研究所,借助一台医用CT实现了加载过程中岩石材料细观损伤扩展规律的实时试验研究[6]。后来,一些研究人员陆续完成了一系列改进,分别结合医用CT或工业CT开展了原位加载下的实时CT观测试验[7?15]。不难发现,受限于材料加载装置复杂的管路连接和传感器布置,将其与医用CT结合是比较容易的。因为在医用CT中,加载装置类似于病人,在试验过程中可以保持不动,而是通过X射线源以及探测器的旋转来实现相对运动并完成扫描成像。另外,医用CT可以快速完成整个扫描过程,这也有助于对流体渗透驱替过程的CT成像追踪。但是若为了提高分辨率,工业CT就是更好的选择了,而且它可以提供更宽的功率范围,能够扫描各种材质。
从目前的研究中发现,将工业CT与加载装置相结合时面临的一个重要问题是,加载装置必须随转台一起进行高精度的稳定旋转,因此各种管路和连线在旋转过程中的干涉就必须设法解决,否则就会缠绕起来阻碍转台的旋转。尤其是各种测量载荷、位移等信号的传感器,其连接线在整个试验过程中是不能断开的,否则测量值就会发生偏差。位移信号还可以考虑采用非接触式位移计进行测量,但载荷信号就必须进行原位测量了。考虑到在小转台上实现加载和旋转,需要尽可能减轻加载装置的重量,一般采用液压加载方式。因此加载装置的原位压力测量就成为亟需解决的关键问题。而且作为工业CT原位加载实验的关键部分之一,压力信号数据采集与传输系统的可靠性、稳定性、实时性都将直接影响到最终试验能否成功。因此设计一套稳定、可靠的压力信号采集与无线传输系统对于工业CT系统而言极为重要。
随着物联网的兴起,无线传感器已经成为可能,各种无线传输技术也被大量应用[16?20]。结合工业CT和电机机械加载装置的无线测试系统也初步实现[21],这是通过专用的无线模块自定义信道来完成数据传输的,在数据获取和解释方面需要专用软件来完成。比较各种无线传输技术,WiFi通信具有组网灵活、兼容性强、性能稳定、易于开发等优势,在许多领域都取得了很好的应用效果[22?25]。尽管WiFi模块可以直接和A/D电路连接实现简单的数据发送功能,但结合ARM系统可以根据具体要求完成更加智能的数据采集和发送任务。下面就基于ARM技术和WiFi通信技术,对工业CT原位加载装置压力信号采集系统的设计进行具体说明。本文所介绍的设计方案中采用了基于ARM芯片STM32F205的WiFi模块WM?N?BM?09,当然也可根据需求更换为其它型号的ARM芯片和WiFi模块。
1 系统方案设计
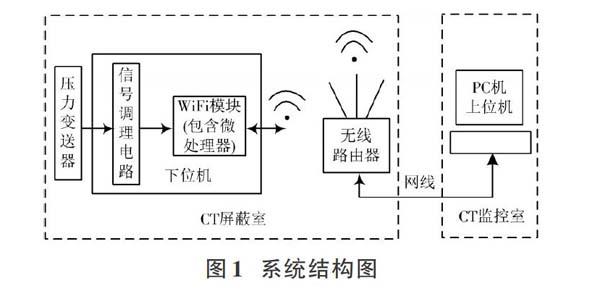
工业CT原位加载装置由液压油通过活塞对试样施加载荷,或者直接对试样施加围压载荷。加载同时X射线照射罐体中试样,得到试样CT扫描图像。为得到不同角度的CT扫描图像,加载装置在加载同时缓慢转动。如果加载过程中信号采用有线形式传输,在加载过程中会出现导线缠绕的问题,跨过罐体上下端的导线还会影响CT扫描图像的效果,因此系统方案设计中考虑信号的传输采用无线传输形式。另外,为防止射线泄露,工业CT主机放置在用硫酸钡砖砌成的CT屏蔽室内,因而无线信号也无法穿透墙体,到达隔壁的CT监控室。鉴于以上特殊情况,设计了如图1所示的系统方案。整个系统由安装在加载装置上的下位机、放置于CT屏蔽室的无线路由器、放置于CT监控室的PC上位机三部分组成。
在下位机中,加载装置压力信号经压力变送器转换为0~5 V或4~20 mA的电信号,再经信号调理后送至WiFi模块模拟输入端,经WiFi模块转换为无线WiFi信号发射出去。CT屏蔽室放置一无线路由器,该路由器与预先埋好的经过墙体的网线相连,无线WiFi信号经无线路由器通过网线传输至CT监控室的PC机,PC机软件可实现对压力信号采集的启停控制,采集数据的实时显示,数据存储等功能。该方案只需设计信号采集端的硬件电路(图中下位机部分),借助无线路由器实现局域网WiFi通信,降低了硬件设计的复杂度,并且方便系统扩展。
2 系统硬件设计
系统硬件设计主要是下位机信号采集端的电路设计,包括信号调理电路、WiFi模块、电源电路等。
2.1 信号调理电路
压力变送器将压力信号转换为0~5 V或4~20 mA的电信号,而WiFi模块模拟输入端的输入电压范围为0~3 V,因此需要设计信号调理电路将压力变送器输出的电信号调理至WiFi模块模拟输入端可接收的信号范围。信号调理电路如图2所示,由精密电阻R1,R2构成的分压电路与运放LM358构成的电压跟随器电路组成。图中VIN来自压力变送器输出的电信号,VOUT送往WiFi模塊模拟输入端。该电路可以实现输入电压信号的电压范围变换及输入电流信号到电压信号的转换。
2.2 WiFi模块
WiFi模块采用USI公司的WM?N?BM?09无线通信模块。该模块支持IEEE 802.11b/g/n协议,具有体积小、功耗低、设计灵活性高等优点。模块内部结构框图如图3所示。内部集成了博通公司的BCM343362WiFi芯片和意法半导体的STM32F205微处理器芯片。通过该模块可以非常方便地将SPI,USB,UART,GPIO,ADC,DAC等通用接口连接到无线局域网中。WM?N?BM?09的硬件接口电路如图4所示,模块RST端接复位电路,ANT端接外置天线,四路经过处理的模拟输入信号分别接至模拟输入端ADC1~ADC4。
2.3 电源电路
电源电路要提供12 V,5 V,3.3 V三个供电电压,分别为外接的压力变送器、信号调理电路及WiFi模块供电。因数据采集端下位机要和加载装置一起,动态加载时随罐体旋转,为避免加载过程的导线缠绕问题,信号传输方式上选择了无线传输形式。对于下位机的供电同样也要避免这一问题,因而采用了电池供电方式。采用锂电池串联供电,可提供外接压力变送器的12 V供电电压,同时该12 V电压经降压模块转换得到5 V,3.3 V电压,分别为信号调理电路及WiFi模块供电。为简化电路设计,降压模块选用了双路输出的TPS54290降压模块。电源电路如图5所示,图中VOUT1,VOUT2可分别由式(1)、式(2)确定,通过选择合适阻值的电阻,可使电源电路的两路输出VOUT1,VOUT2分别为5 V与3.3 V。
式中,VREF为TPS54290内部参考电压,其值为0.8 V。
3 系统软件设计
系统软件包括数据采集端下位机软件和PC上位机软件。下位机软件主要实现A/D转换,网络IP配置、WiFi通信等功能。上位机软件主要实现采集控制、数据记录与显示等功能。
3.1 通信协议与数据包格式
在WiFi通信中,网络传输层的协议主要有TCP和UDP两种。TCP作为一种面向连接的传输協议,能够提供稳定可靠的传输服务,具有确认、重传、拥塞控制机制。但TCP传输效率相对较低,占用系统资源较高,不适用于大规模数据的实时传输。UDP作为一种无连接、无状态的传输协议,实时性较好,系统资源消耗小,传输效率高。但在不稳定的网络环境中,UDP传输可能会发生丢包或数据顺序错误。考虑到加载过程中有大量数据需要实时采集,这里选定UDP协议进行无线传输,并在上位机采集软件中进行数据包识别和检测,以便在保证良好实时性的前提下适当进行数据容错处理。
不同于TCP的数据流模式,UDP采用的是数据报模式,因此需要对数据包的格式进行约定,从而实现上位机和下位机之间的可靠数据传输。根据采集通道数和A/D分辨率,定义数据包格式如下:
typedef struct _monitor_data
{
UCHAR framflag; /*起始字符*/
UCHAR devID; /*下位机编号*/
UINT16 dlenleft; /*数据包后继长度字节数*/
UINT32 Sample_time; /*采样时间*/
INT16 Ain[4]; /*四路模拟信号*/
INT16 Din[2]; /*两路数字信号*/
UCHAR status; /*状态码*/
UCHAR crc; /*校验码*/
}monitor_data;
每个数据包中包含一次采样的A/D数据。上位机收到数据包后,可根据采样时间调整收到的数据,按顺序显示和记录采集到的数据。另外需要注意的是,数据包中的16位、32位数据要在传输前后进行网络字节顺序转化。在上位机程序中可采用htonl()和ntohl()、htons()和ntohs()这些函数来实现。在下位机中也需要根据开发环境的设置进行移位处理。
3.2 下位机软件
下位机ARM系统的软件编程利用STM32库函数实现。软件流程图如图6所示。在初始化时需对相应的GPIO口进行设置,以实现A/D采集和指示灯、按键等功能。另外要对定时器进行初始化,从而在指定时间引发中断开始数据采集与发送。
图6 下位机软件流程图
下位机软件中通过判断UART传来数据的时间间隔区分不同的数据帧。若时间间隔大于20 ms则认为一帧结束,否则一直接收数据到上限值2 KB。因此上位机发送指令的间隔应大于20 ms,以方便下位机识别指令。指令格式可以自定义,但需要以“\r\n\r\n”结束。例如指令“ON,1 000”表示开始采集,采样间隔1 000 ms;指令“OFF”表示停止采集。这样就可以通过软件来控制数据采集的启停。
3.3 上位机软件
由于采用了标准的WiFi通信协议,上位机的软件可以很方便实现,而且也可以整合到现有的CT系统扫描及加载控制软件中。图7给出了单独采集软件的流程图。
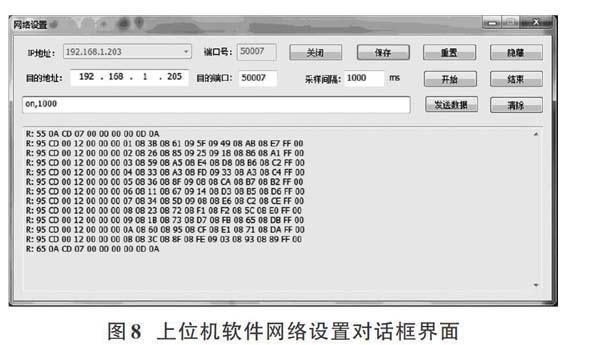
启动软件之后,首先需要设置网络参数(如图8所示),启动UDP连接。根据网络连接情况,选择相应的网卡和IP地址,填写下位机的IP地址以及端口号,填写采样间隔时间,然后点击“开始”按钮就可以发送指令到下位机开始采集数据。采集过程中可随时点击“结束”按钮发送指令到下位机停止采集数据。图中所示包括了收到的原始数据,其格式如3.1节所述。
经过联机测试,该系统可以稳定地采集到工业CT原位加载扫描过程中加载装置的压力信号见图9。
在实际使用中,WiFi信号传输稳定,没有观测到受X射线以及旋转运动的影响,上位机收到的UDP数据包没有发生丢包、错序等问题。而且实测100 ms采样间隔下也可正常运行,这就可以每秒采集10组数据,完全满足静态加载测试的需求。
4 结 论
针对工业CT原位加载扫描实验中加载装置压力信号的采集问题,本文基于ARM技术和WiFi技术给出了一种无线数据采集方案,避免了旋转扫描过程中传感器外接连线带来的缠绕和遮挡问题,实现了多路数据的实时可靠采集。整个采集系统由安装在加载装置上的下位机、放置于CT屏蔽室的无线路由器、放置于CT監控室的PC上位机三部分组成。下位机与路由器通过无线连接,路由器与上位机通过网线连接,从而实现下位机与上位机的网络连接。下位机采用ARM+WiFi模式,电池供电,可以实现压力变送器信号的高精度采集,并采用UDP协议将数据实时传输给上位机。上位机接收网络UDP数据包,解析数据后实时显示数据和绘制图形,并可在实验结束后保存数据到文件中。经过实验测试,该系统性能稳定可靠,完全满足静态加载的数据采集需求。可以预期,通过选择更高主频的ARM系统以及更大带宽的WiFi模块,还可进一步提高采样速度,以满足未来可能的动态加载测试试验。
参考文献
[1] 高丽娜,陈文革.CT技术的应用发展及前景[J].CT理论与应用研究,2009,18(1):99?109.
[2] 张朝宗.工业CT的系统结构与性能指标[J].CT理论与应用研究,2014,23(3):443?452.
[3] 傅健,邢春香,满庆丰.计算机层析成像一体化实践教学平台[J].实验技术与管理,2011,28(3):289?291.
[4] 王龙,冯国林,李志强,等.X射线断层扫描在材料力学行为研究中的应用[J].强度与环境,2017,44(6):43?56.
[5] 李晓宁,向铭铭,朱宝龙.CT技术在岩土工程研究中的应用[J].实验技术与管理,2016,33(11):80?83.
[6] 葛修润,任建喜,蒲毅彬,等.岩石细观损伤扩展规律的CT实时试验[J].中国科学E辑,2000,30(2):104?111.
[7] 赵阳升,孟巧荣,康天合,等.显微CT试验技术与花岗岩热破裂特征的细观研究[J].岩石力学与工程学报,2008,27(1):28?34.
[8] 杨永明,宋振铎,鞠杨,等.压缩载荷下孔隙结构变化的CT实验研究[J].力学与实践,2009(5):15?20.
[9] 田威,党发宁,丁卫华,等.适于CT试验的动态加载设备研制及其应用[J].岩土力学,2010,31(1):309?313.
[10] 彭瑞东,杨彦从,鞠杨,等.基于灰度CT图像的岩石孔隙分形维数计算[J].科学通报,2011,56(26):2256?2266.
[11] 毛灵涛,刘海洲,牛慧雅,等.基于工业CT力学实验平台的建立及应用[J].CT理论与应用研究,2015,24(2):271?282.
[12] 李炜.CT技术及混凝土CT试验加载设备[J].工程建设,2010,42(3):5?8.
[13] 李小春,曾志姣,石露,等.岩石微焦CT扫描的三轴仪及其初步应用[J].岩石力学与工程学报,2015,34(6):1128?1134.
[14] 赵弘,杨立豪,李琨,等.基于工业CT的多功能加载控制系统设计及实验研究[J].机床与液压,2018,46(4):109?115.
[15] 李大应,胡小方,夏源明.材料拉压加载试验实时同步辐射CT分析系统[J].实验力学,2006,21(3):292?298.
[16] 齐俊艳,王磊,乔莉.矿用透水事故水声通信救援系统研究[J].现代电子技术,2018,41(17):25?29.
[17] 周鹏,章伟,张小强.基于无线传感器网络的房屋健康监测系统设计[J].现代电子技术,2018,41(10):5?9.
[18] 王伟峰,侯媛彬,邓军,等.矿井采空区气体?温度?压差无线传感器的设计及应用[J].现代电子技术,2017,40(18):117?119.
[19] 张希洋,曹国强,梁峰,等.基于单片机控制的嵌入式智能无线传感器设计[J].现代电子技术,2017,40(13):80?82.
[20] 金开军,李疆.基于无线传感器网络的数据采集系统研究[J].现代电子技术,2017,40(10):72?74.
[21] 赵弘,赵毅鑫.基于虚拟仪器的工业CT无线自动加载测试系统[J].仪器仪表学报,2012,33(8):1753?1757.
[22] 张玉良,刘强,刘启通.基于网络的数控机床能耗监测系统[J].现代电子技术,2017,40(21):124?127.
[23] 文小冬,裴以建,王群立,等.基于APP操控平台的手势识别机械臂控制系统[J].现代电子技术,2018,41(22):72?74.
[24] 杨俊.基于ARM+WiFi技术的远程抄表系统设计[J].自动化与仪器仪表,2017(9):87?89.
[25] 罗瑞雪.基于WiFi的温室环境检测与控制系统[J].自动化与仪器仪表,2017(6):86?88.
