CM OS图像传感器在太阳磁场观测中的应用研究∗
2020-08-03白先勇郭晶晶冯志伟邓元勇林佳本张建立
段 帷 宋 谦 白先勇 郭晶晶 冯志伟邓元勇 林佳本 张建立
(1中国科学院国家天文台北京100101)
(2中国科学院大学北京100049)
1 引言
19世纪50年代,Bobcock父子利用机械扫描的方法,将狭缝光谱仪测量的线源(一维)目标的磁场通过机械扫描获得日面二维磁图,该磁图具备多波长、非实时的特点(光谱型磁像仪).到了70年代发明了视频磁像仪,从而能够获得某一波长的实时二维磁图(滤光器型磁像仪)[1].我国太阳磁场的观测研究始于上世纪80年代,中国科学院国家天文台怀柔太阳观测基地研制的35 cm太阳磁场望远镜[2]、60 cm多通道望远镜[3]以及全日面太阳望远镜[4]均进行太阳磁场的观测,都属于滤光器型磁像仪.
早期的太阳磁场观测采用胶片作为数据采集设备,中国科学院国家天文台怀柔太阳观测基地在1987年之前采用胶片相机作为数据采集器件.1987年之后电荷耦合元件(Charge-coupled Device,CCD)图像传感器作为数据采集设备应用到太阳磁场观测中,从此CCD图像传感器替代胶片成为主要的数据采集器件.近年,随着望远镜技术的不断发展以及空间天文观测的蓬勃发展,太阳物理研究对太阳磁图观测视场、空间分辨率和时间分辨率等提出了更高的要求,因此在同样的时间分辨率下对探测器的像素规模要求更大.而现在采用的高速CCD图像传感器面阵规模通常小于2 k×2 k,很难同时满足高时空分辨率的需求.而互补金属氧化物半导体(Complementary Metal Oxide Semiconductor,CMOS)图像传感器能够同时满足大面阵和高速读出帧频的要求,所以近年来,太阳磁场观测设备中开始使用CMOS图像传感器.
表1中列举了国内外正在运行和即将发射的太阳磁场测量设备的图像传感器使用情况.全日面矢量磁像仪(FMG)为先进天基太阳天文台(ASO-S)上的载荷.位于Solar Dynamics Observatory(SDO)空间设备上的HMI(Helioseismic and Magnetic Imager)[5]以及今年发射的位于Solar Orbiter(SO)上的PHI(Polarimetric and Helioseismic Imager)[6]分别采用全帧CCD图像传感器和CMOS图像传感器.地基设备如怀柔太阳观测基地(HSOS)的SMCT(Solar Multi-Channel Telescope)1Bobcat 2.0 CCD CAMERAS Specif ication与德国Teide Observatories(TO)的1.5 m太阳望远镜GREGOR Solar Telescope上的GFPI(GREGOR Fabry-Perot Interferometer)[7]均采用InterlineCCD图像传感器.中国科学院云南天文台抚仙湖太阳观测基地(FSO)的NVST(New Vacuum Solar Telescope)同时采用了InterlineCCD图像传感器与sCMOS图像传感器[8],2010年出光的Big Bear Solar Observatory(BBSO)的1.6 m GST(Goode Solar Telescope)[9]和美国4 m Daniel K.Inouye Solar Telescope(DKIST)上的ViSP(Visible Spectro-Polarimeter)采用的是sCMOS图像传感器2Andor Zyla for Physical Sciences Specif ications,Andor Technology.以上设备中,ViSP是光谱型太阳磁场测量仪,NVST既有光谱型也具有成像型太阳磁场测量仪,其余均为成像型.
从表1中可以看到,CCD图像传感器在约10 yr前建造的设备中被广泛运用,而随着CMOS图像传感器的出现以及其性能的不断提高,近年的太阳磁场望远镜中开始使用CMOS图像传感器作为成像器件.CMOS图像传感器(后简称CIS)具有集成度高的特点,因此在具有较大的面阵规模的同时能够具备较高的帧频,特别适合太阳磁场高时间分辨率的观测要求.
FMG载荷的科学指标要求观测视场34′,像元分辨率0.5′′,要求探测器面阵大小满足4 k×4 k.为降低太阳同步轨道对日速度的影响并获得足够的磁场灵敏度,FMG采用快速偏振调制(每秒完成10个观测周期,100 ms内完成曝光、读出、偏振分析器状态切换,因此对探测器的帧频要求至少要大于10 fps,fps为帧每秒)和星上多帧叠加(约256帧)的策略.通过上述策略,实现磁图空间分辨率和HMI相当,时间分辨率比HMI更高的目标.从表1中看到针对FMG载荷探测器的选型目前没有成熟项目可借鉴,需要自主探索探测器方案.
表2列举了根据上述指标筛选出来的部分市面上高速大面阵图像传感器,调研同时考虑到探测器是否具有空间环境条件的适应性要求,以满足FMG载荷的要求.
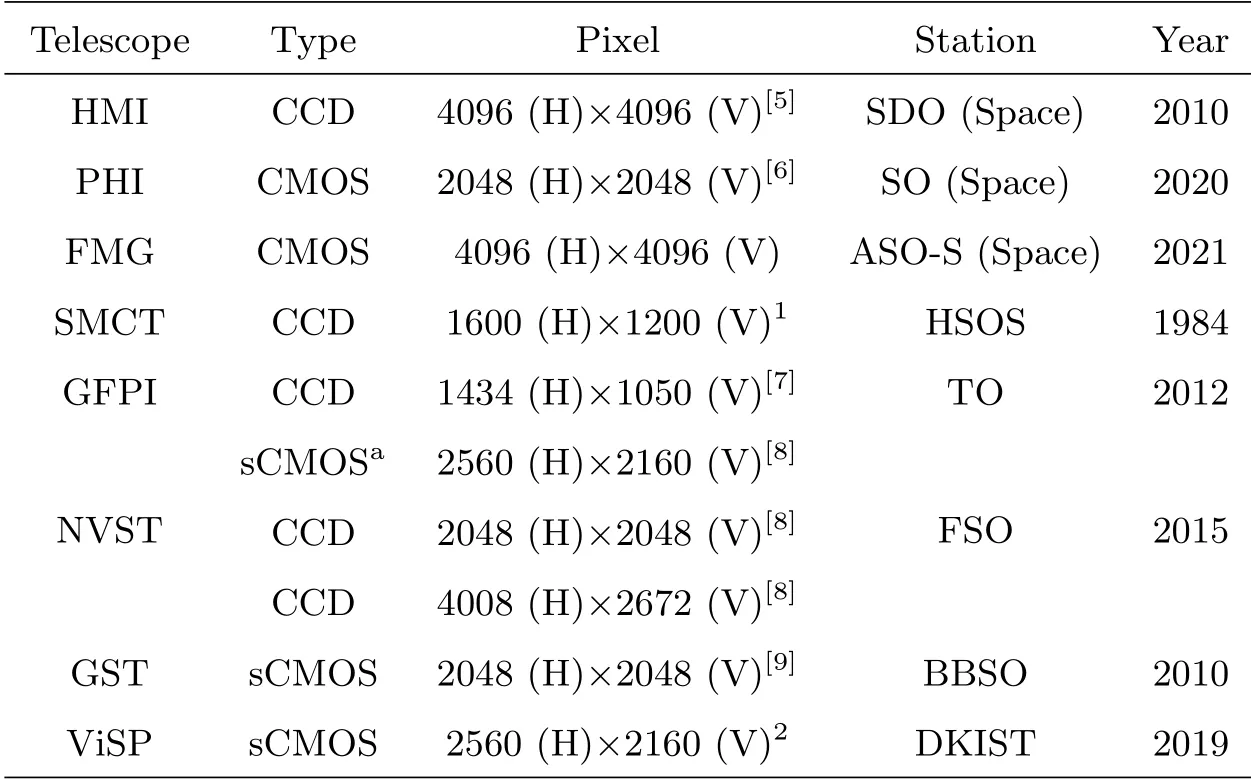
表1 太阳磁场望远镜中图像传感器的使用情况Table 1 Application of image sensors in solar magnetic field telescop es
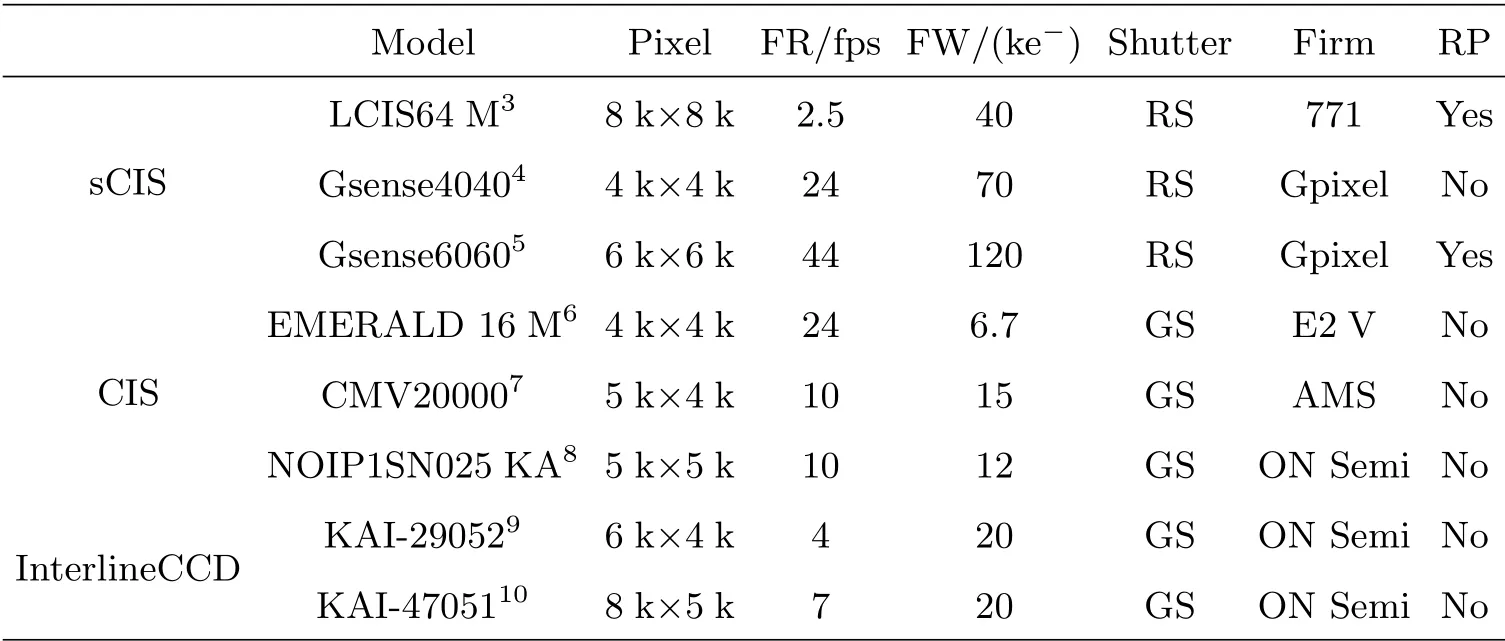
表2 大面阵高帧频图像传感器aTable 2 Large ar ea high fr ame r ate image sensors a
表2所示帧频较高的CCD图像传感器以interlineCCD图像传感器为主,InterlineCCD具备了电子快门的功能,4k×4 k的InterlineCCD图像传感器读出帧频最大为7fps,不满足FMG至少10 fps的帧频要求.
CIS芯片像素规模为4 k×4 k的情况下大部分帧频都大于10 fps,部分甚至能够达到40 fps,科学级的CIS芯片读出噪声大都低于10e−(10个电子),而且国内外的可选择的CIS型号也较多,包括一些能用于空间环境下的器件,因此更有可能成为新一代太阳磁场观测采用的探测器.
表2中列举的CIS芯片具有两种电子快门模式,即全局快门(GS)与卷帘快门(RS).由于太阳磁场观测流程中需要探测器与偏振分析器协作,因此不同的快门模式应用到流程中会有所差异.本文的目的就是根据CMOS图像传感器的特点,开展其在滤光器型磁像仪上的应用研究.文章安排如下:首先简要介绍FMG载荷太阳磁场的观测流程,然后分别对两种快门模式的CIS芯片进行分析,这两种工作模式的CIS芯片与太阳磁场观测流程需要进行流程的匹配.选择适合太阳磁场观测的CIS芯片的快门模式,并对此类CIS芯片进行实验室测试以及外场观测,根据测试结果得到针对FMG载荷的探测器选型依据.
2 两种快门在太阳磁场观测中的工作流程
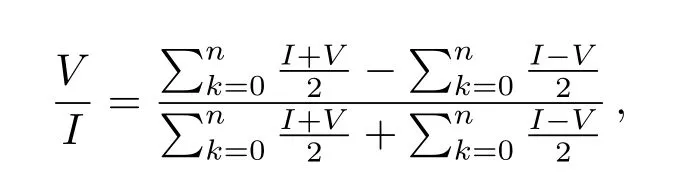
太阳磁场测量实际上是偏振测量,以滤光器型磁像仪观测的斯托克斯参数V/I(Stokes V/I)观测为例,FMG载荷太阳磁场观测通过交替采集左右旋偏振像,利用如下公式[10]解调V/I分量:其中,n为左右旋偏振像的叠加帧数,k表示第k帧左旋、右旋偏振像,(I+V)/2为左旋偏振像,(I−V)/2为右旋偏振像.测量时左右旋偏振像通过切换偏振分析器进行交替成像,流程如图1所示(为了得到足够的信噪比(SNR)需要得到多帧左右旋偏振像进行叠加.这样既能使左右旋偏振图具有足够的等效曝光时间,同时也避免了日面特征演化等因素的影响).

图1 太阳磁场观测流程Fig.1 Solar magnetic field observation process
从太阳磁场观测流程中可以看到对探测器的特殊要求:(1)帧频要求较高,因为在等效的曝光时间内需要进行n次成像;(2)探测器的工作要与偏振分析器同步.所以,CIS芯片的工作模式会影响观测流程,进一步会影响到观测效率和时间分辨率等.
以下分别梳理GS与RS两种快门模式在FMG载荷的太阳磁场观测流程中的具体工作方式.
在针对FMG载荷太阳磁场观测的探测器选择时需要注意,在确定一个观测周期时间时(包含一次偏振调整、曝光时间和读出时间参见图1),虽然一个观测周期时间相同,但对应到不同快门的流程上就涉及到很多指标的变化.
卷帘快门模式CIS芯片采用卷帘读出模式,每一行像素的曝光与读出都是独立的.如图2左图所示为卷帘快门模式的工作流程,虽然每一列的曝光时长相同,但是其曝光起始时间不同,所以每一列捕捉到的图像有时间差,如果被测物体变化较快,如图2右图所示,由于每一行的起始时间不同会形成形变.因此,采用卷帘快门模式的CIS芯片对太阳磁场观测时,在图像的读出时间内,不能进行偏振分析器的调节,结合图1所示的观测流程,卷帘快门模式与太阳磁场观测流程结合后得到的工作流程如图3所示.
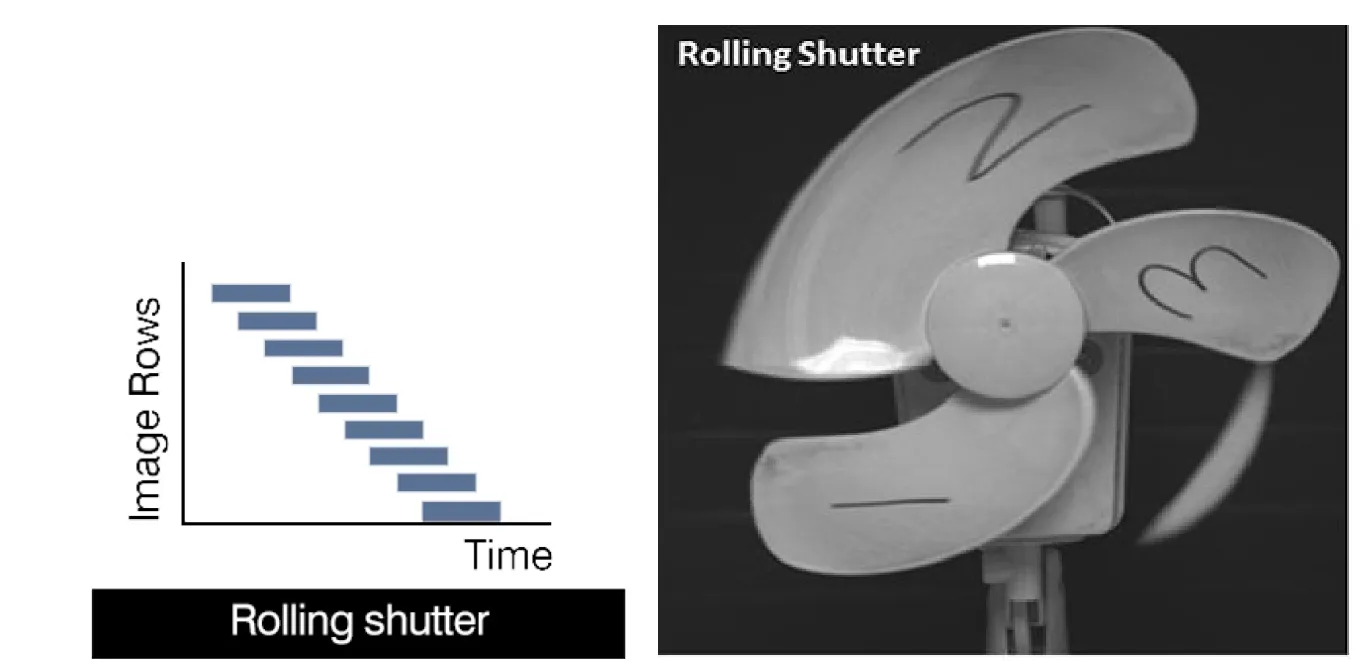
图2 卷帘快门11−12Fig.2 Rolling shutter 11−12

图3 采用卷帘快门的太阳磁场观测流程图Fig.3 Flow chart of solar magnetic field observation with rolling shutter
由于在整个CIS芯片读出时间中,不能改变光路的状态,因此该流程是一个串行观测流程,即使CIS芯片的读出帧频很高,而在实际使用中,观测频率(一帧左旋或者右旋偏振像获得的整个时间)要远远低于CIS芯片的最高帧频.
全局快门工作流程如图4左图所示,从工作模式看,所有的像素同时曝光,在曝光结束时将所有电子转移到存储区,再依次读出.因此采用全局快门的CIS芯片每个像素具有相同的曝光时间和相同的曝光起始时间,因此捕捉到的风扇像中每个像素发生的时间一致,没有形变,如图4右图所示.
采用全局快门的太阳磁场观测流程如图5所示,由于在读出前,当前帧的图像已经被锁定,光路的改变不影响前一帧读出,因此只要偏振状态调整时间和曝光时间的和小于读出时间,其整个观测的帧频就等于CIS芯片的读出帧频.
通过以上介绍,如果采用全局快门,只要偏振调整时间加曝光时间的和(参看图5)小于观测周期,那么CIS芯片的读出周期就只需要小于等于FMG的观测周期即可,能够使用的最大曝光时间为观测周期减去偏振调整时间.
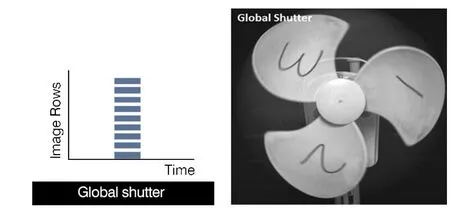
图4 全局快门11−12Fig.4 Global Shutter 11−12

图5 采用全局快门的太阳磁场观测流程图Fig.5 Flow chart of solar magnetic field observation with global shutter
如果采用卷帘快门,由于其快门特点观测流程为串行模式,CIS芯片的曝光时间要等于观测周期减去偏振调整的时间以及图像读出时间,因此实际的曝光时间就小于采用全局快门的CIS芯片,同时CIS芯片的读出帧频还需要远远大于观测频率.
FMG载荷的观测周期100 ms(每秒10个观测周期),偏振调整时间为50 ms,两种快门CIS芯片的最高读出帧频与每一帧图像得到曝光时间之间的关系如图6所示.采用全局快门时,只要读出帧频大于10 fps时(单帧读出时间小于100 ms),曝光时间就能够达到50 ms.而采用卷帘快门模式时,当帧频小于20 fps(读出时间50 ms),无法保证100 ms的观测周期;当帧频等于20 fps时,每一帧图像的读出时间等于50 ms,此时留给观测周期内的曝光时间为0 ms;当帧频达到40 fps时(读出时间25 ms),此时观测周期的最大曝光时间为25 ms,卷帘快门模式下CIS芯片帧频越高,能使用的曝光时间越接近50 ms.
在同等条件下,曝光时间长短决定了CIS芯片能够接收到的光子数,因此同等条件下每一个观测周期的曝光时间越长(满阱内),能够得到图像的信噪比也越高,因此从信噪比上来看全局快门的CIS芯片更适合于太阳磁场的观测.同时虽然具有卷帘快门的CIS芯片最高帧频能够达到40 fps,但是实际稳定工作帧频在20 fps左右,因此目前的卷帘快门的CIS芯片并不适合FMG载荷需要的每秒10个观测周期的需求.针对FMG载荷的指标需求,具有全局快门的CIS芯片是最好的选择.
3 全局快门模式CIS芯片实验室性能测试
本次测试采用PM20000相机,该相机使用具有全局快门的CMV20000芯片,相机帧频能够达到15 fps,面阵规模约5 k×4 k,像元尺寸6.4µm.
首先在实验室进行测试,由于CIS芯片中每个像素都具有独立的放大器,导致每个像素的增益各不相同,因此在对其增益进行测试时,要对每个像素单独进行增益测试,获得各个像素的光子转移曲线,计算出每个像素的增益.
如图7所示为像素点(60,60)和像素点(500,500)的增益,图中直线的斜率即是该点的增益,分别是1.97e−/ADU(Analog to Digital Unit)与2.16e−/ADU.图8是对(1000×992)区域的约1000000个点进行的增益统计得到的分布图,增益在1.5e−/ADU到3e−/ADU之间基本符合正态分布的特点,增益中心位置为2.1e−/ADU.可见CIS芯片的每个像素的增益不同,这与以往使用CCD的观测系统是不同的.通过对该区域0曝光时间暗场的统计计算,得到读出噪声为8.96e−.此外测得的均匀性指标显示在ADC(Analog to Digital Convert)半量程状态下非均匀性指标≼3%,非线性指标<1%.
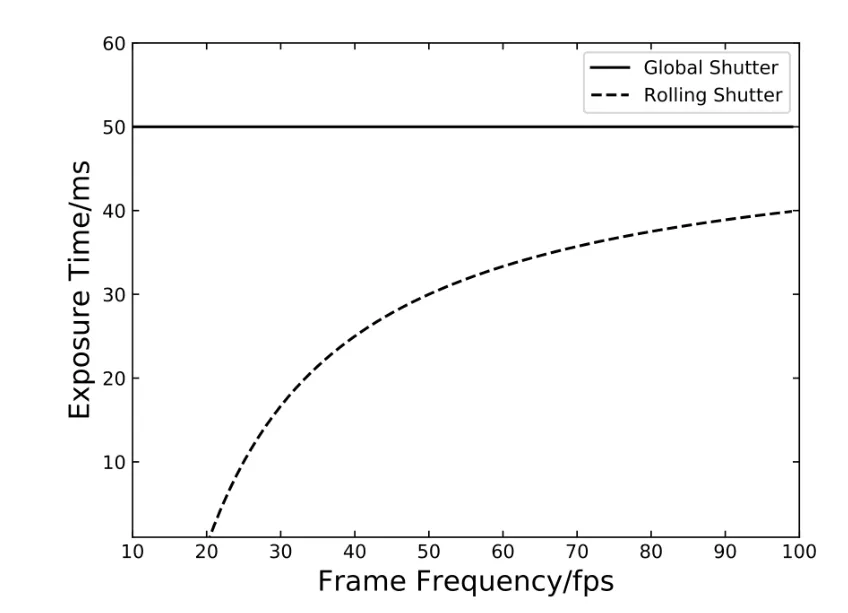
图6 卷帘快门与全局快门的曝光时间Fig.6 Exp osure time of rolling shutter and global shutter
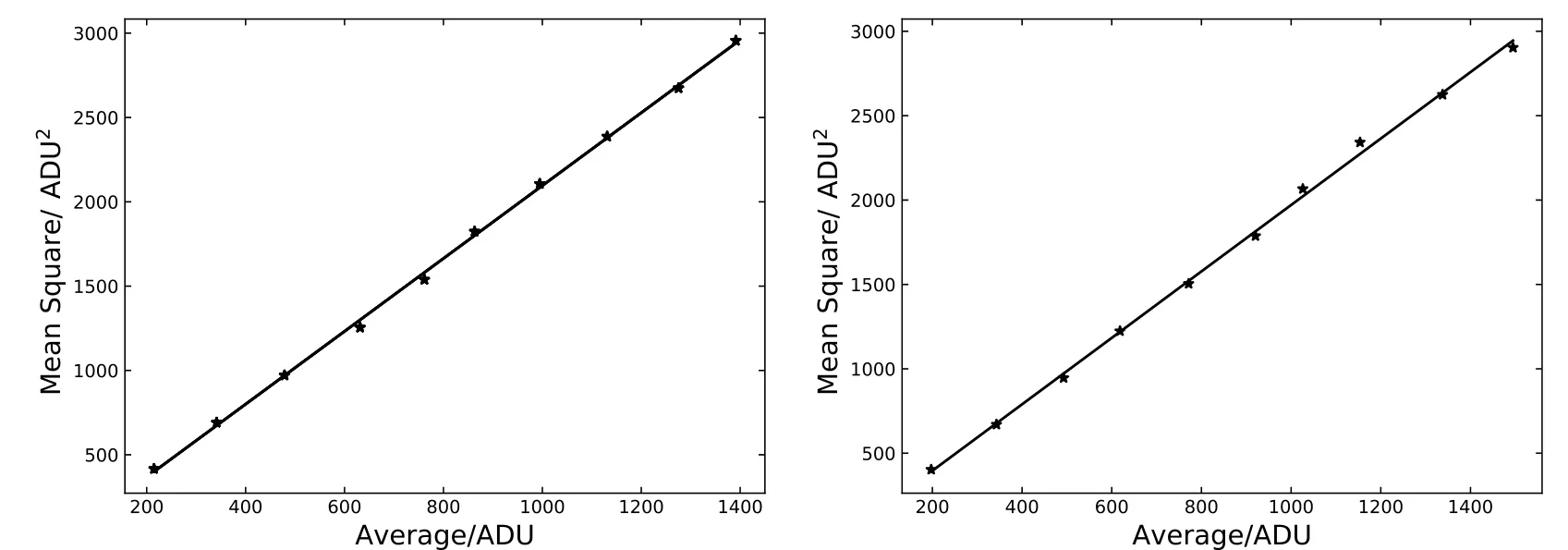
图7 单个像素光子转移曲线Fig.7 Photon transfer curve for single pixel
除了常规指标测试,考虑到与太阳磁场观测的信噪比指标要求,因此在实验室环境下进行了观测流程的信噪比测量,实验室信噪比随叠加帧数的曲线如图9所示.实测结果达到6600的信噪比需要左旋3200帧叠加、右旋3200帧叠加,与计算的理论信噪比增加曲线比较吻合(假设增益为2.5e−/ADU,实验室测试的增益也在这个范围内).实际观测中,由于其他设备也会引入噪声,因此要达到同样的信噪比需要更多的叠加帧数.
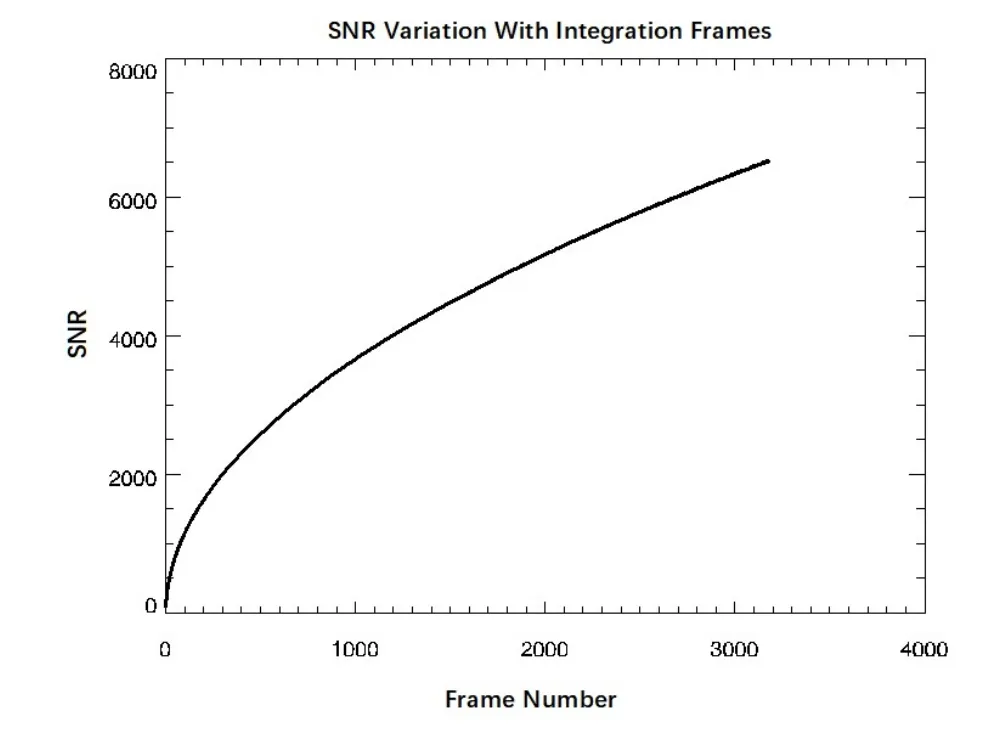
图9 叠加帧数与信噪比的关系Fig.9 The relationship between the number of adding frames and SNR
4 全局快门模式CIS芯片外场测试
外场试验在位于怀柔太阳观测基地的全日面太阳望远镜上进行,全日面像尺寸为1200像素×1200像素,相机帧频16 fps,如图10左图所示为512帧叠加太阳单色像,重复40次,共采集了左旋20480帧、右旋20480帧图像.在偏离线心−0.08˚A波长位置计算的Stokes V/I偏振像(未改正暗场)如图10右图所示,显示灰度[−0.001,0.001].
选择图中黑色矩形A区域(100像素×100像素,几乎无偏振信号且选择日面边缘附近信号更弱,5 Gs磁场灵敏度更难达到,更有利于评价CMOS性能[11]),乘以10000的定标系数得到纵向磁场,并根据3倍标准差判据计算的磁场灵敏度为3 Gs,暗场改正后同一区域纵向磁场灵敏度(3倍标准差)为4 Gs.达到5 Gs纵向磁场灵敏度(3倍标准差)需要的帧数为左旋7168帧、右旋7168帧.通过实测,使用CMV20000芯片,在怀柔的全日面太阳磁场望远镜上进行观测能够满足FMG载荷的性能要求,但是由于商业芯片没有进行空间抗辐照设计,因此不符合FMG载荷的使用环境要求.
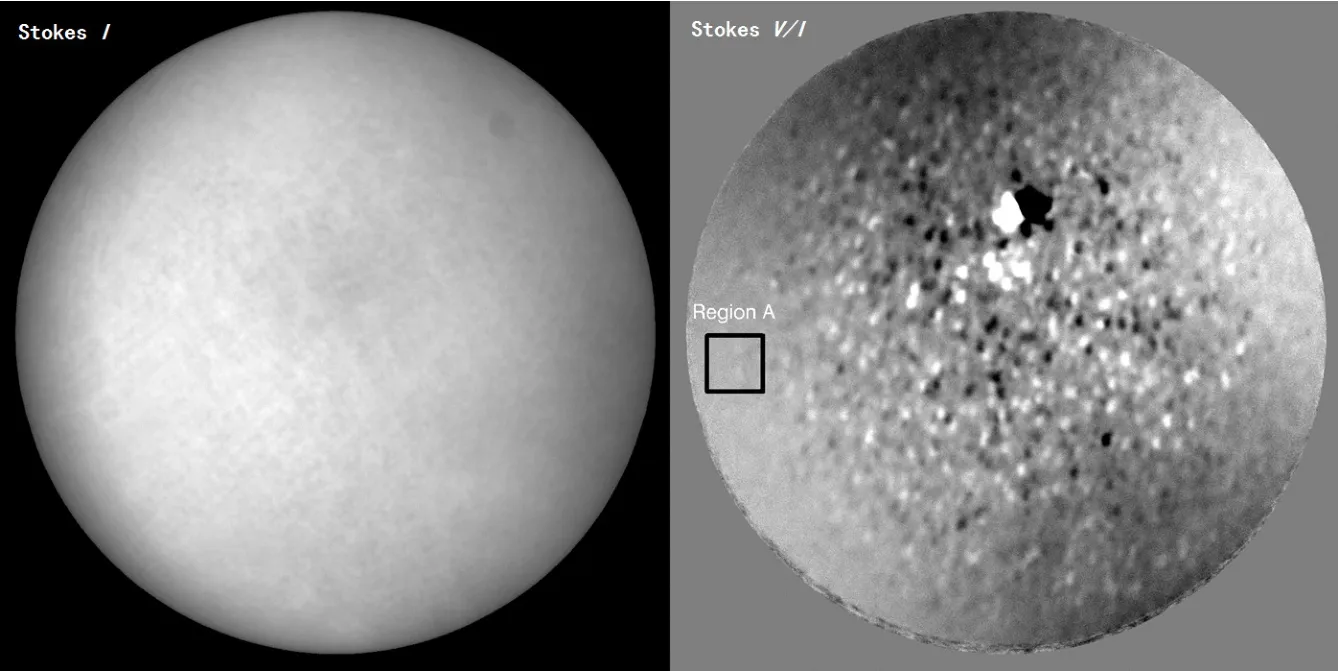
图10 观测图像Fig.10 Observation image
根据FMG载荷时间分辨率要求达到每秒10个观测周期,而偏振分析器的转换时间为50 ms,因此每一帧图像能够使用的曝光时间上限为50 ms,商业级CIS芯片的满阱小于1.5ke−(一般情况下还只能使用低于半满阱),能够使用的曝光时间低于30 ms,曝光效率较低,因此在选型时同等条件下可以选择满阱较大的CIS芯片以增强光子的收集能力.
5 总结与展望
CIS芯片由于其高时空分辨率的特点,适合在太阳磁场观测中运用,其中全局快门在观测效率上同卷帘快门相比具有很大的优势.通过对全局快门CIS芯片的实验室测试,具有全局快门的商业级大面阵CIS芯片的实验室性能测试证明其非线性度(优于1%)与均匀性(优于3%)可以满足FMG载荷对探测器的要求(增益为2.1e−/ADU时,读出噪声为8.96e−左右).在怀柔太阳观测基地的全日面太阳望远镜上进行的外场观测中获得优于5 Gs磁场灵敏度的全日面纵向磁图.需要指出的是,CIS芯片每个像素的增益不同(CCD同一读出通道的增益相同),如图8所示,在后期的磁图或单色像处理中要考虑不同像素增益带来的影响.
具有全局快门的CIS商业芯片性能指标上能达到FMG载荷的需求,但是由于FMG载荷有抗空间辐照特殊要求,具有全局快门的航天级大面阵探测器才能满足FMG载荷的时间分辨率、空间分辨率和空间工作环境的需求.调研结果显示,国内研究所正在进行大面阵的全局快门CIS芯片的研制,大部分为针对空间的应用,有的已经进入到实用阶段,因此FMG的探测器选型上应该以该类产品为目标.
致谢感谢怀柔太阳观测基地工作人员在外场调试期间给予的支持和配合.感谢审稿人对文章提出的宝贵建议,使得文章质量有了显著提高.