基于SINS 的采煤机动态定姿技术的应用研究
2020-07-31王娟
王 娟
(山西省阳泉市大阳泉煤炭有限公司, 山西 阳泉 045000)
引言
作为煤矿井下“三机”设备的核心,采煤机不仅需要完成割煤和落煤作业,而且需要作为综采设备联动的关键点,为实现井下综采设备的自动化联动提供定位参考。传统的采用红外线定位方案只能根据所接受到的红外线信号的强度来判断采煤机的位置,但由于井下工作环境恶劣、粉尘量大,对红外线的传输存在着较大的干扰,因此导致传输中存在一定的偏位和干扰,定位误差较大,无法满足联合控制的精度需要。齿轮计数法虽然受外界干扰较小,但通过行走齿轮计数累积误差较大,采煤机运行时间越长其定位误差就越大,需要频繁地修正,将严重降低井下的综采作业的效率[1]。因此本文提出了利用SINS(捷联惯性导航)的定位方案,在采煤机的本体上设置一个三轴陀螺仪机、一个加速度传感器,通过对采煤机运行时的角速度和加速度的监测,并结合采煤机的初始位置信息即可实现对采煤机动态位置姿态的精确跟踪测量,为实现井下综采作业的自动化无人化奠定了坚实的基础。
1 SINS 定位原理
采煤机在井下进行工作时,一方面进行进给运动,一方面由摇臂控制截割机构进行截割运动,因此采煤机在煤矿井下巷道内的运动是空间三维运动,其定位也需要进行三维空间定位,在实际应用中将三轴陀螺仪及一个加速度传感器设置到采煤机的机身上,当采煤机运行时该陀螺仪和加速度传感器直接对采煤机在运行方向上的加速度和角速度进行动态监测。为了适应采煤机在井下工作时的震荡、冲击及井下温度、湿度、粉尘浓度的变化,所使用的测量传感器必须将所测量的数据信息快速、稳定地传输给控制中心,由控制中心根据所设定的逻辑定位算法对采煤机工作时的位置数据和姿态数据进行分析,再结合采煤机工作初期的定位和姿态信息即可分析出采煤机现在的位置和姿态信息状态,基于SINS 的采煤机的动态位姿定位系统的工作原理如图1 所示。
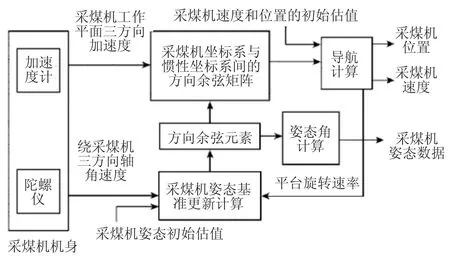
图1 基于SINS 的采煤机定位原理
2 SINS 定位姿态解算原理
由于在该系统中所测量的是采煤机的运动坐标系,而SINS 定位是以地图的空间地理坐标区域来定位采煤机的位置和姿态的,因此需要对采煤机监测信息进行定位坐标和数据的解算。由于SINS 定位所采用的惯性坐标系一般为i系,首先需要进行采煤机相对于地球转速vei的计算,因此由哥氏方程可将采煤机的惯性速度转换为地速表示[2]。

对式(1)求导可采煤机工作时的加速度可表示为[3]:

同时由采煤机的3 个方向上的加速度传感器可求得采煤机惯性导航定位系统中的装置比力的测量值:

式中:g 为采煤机的引力矢量;
将式(2)(3)联立可得:

式中:ωie×ve为采煤机在地球自转速度作用下引起的加速度;ωie[ωie×r]为采煤机质量引力和向心加速度构成的实际重力矢量。
3 基于SINS 的采煤机定姿测量系统的仿真分析
根据采煤机在煤矿井下工作时的实际截割路径,设采煤机工作时首先沿着x轴的方向推进20 m,并在从第9 m 开始到第13 m 的区段内进行斜切作用,然后再沿着y轴的方向推进1 m,利用基于SINS的采煤机动态定姿技术进行测量,解算后的采煤机在井下综采作业时的三维空间轨迹如图2 所示。

图2 采煤机SINS 定位的仿真轨迹
由图2 可知,利用基于SINS 的采煤机动态定姿技术,能够准确地追踪采煤机工作时的运行轨迹,其运行时的位置偏差信息和姿态偏差信息如图3 所示。
由仿真分析结果可知,在该动态定姿技术中当采煤机开始进行斜切进刀及结束时其定位精度会有一个比较显著的波动,这主要是因为当采煤机开始进行斜切进刀时使航向角发生了瞬间的变化导致。该定位方案在x轴方向上的误差精度约为0.4 m,在y轴方向上的误差精度约为0.29 m,在z轴方向上的误差约为0.25 m,不同的方向上具有不同的误差主要是由于采煤机工作时在不同方向上具有不同的加速度误差所致。通过该仿真分析,在对采煤机运行时的两千余个采样点分析可知,其在运行时的定位精度约为0.43 m,其姿态定位精度约为0.6°,完全能够满足对采煤机自动化控制定位精度的要求。

图3 采煤机三轴姿态和位置误差误差曲线
4 基于SINS 的采煤机定姿技术试验验证
在仿真分析的基础上,为了进一步验证该定姿定位技术的可靠性,本文搭建了基于“三机”平台的采煤机SINS 定位验证试验平台[4],其平台上包括了采煤机、液压支架、刮板输送机及定位控制系统等,在进行验证时启动采煤机并调节采煤机模拟进行截割作业,并实现与液压支架、刮板输送机的配合联动,试验平台的结构如图4 所示。

图4 采煤机SINS 定位系统试验平台
在试验时同样选择两千个采样点,其实际测量的采煤机工作时的三轴的加速度变化情况和三轴的位置姿态信息的变化如图5 所示。
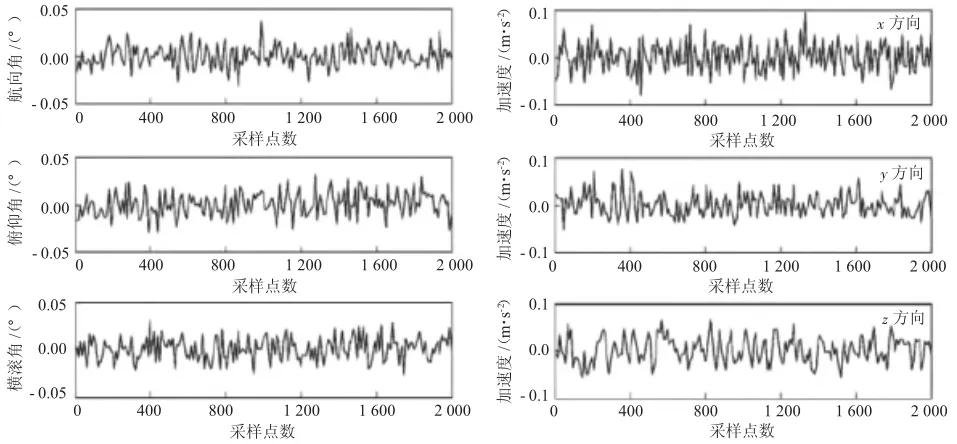
图5 采煤机三轴姿态和加速度变化曲线
由试验验证结果可知,该定位方案在x轴方向上的误差精度约为0.28 m,在y轴方向上的误差精度约为0.41 m,在z轴方向上的误差约为0.31 m,其在各轴上的误差变化与仿真分析结果基本相符,表明了仿真分析结果的准确性,同时也表明了该基于SINS 的采煤机的动态定姿技术对采煤机井下位置、姿态定位的适用性。
5 结轮
1)在该定位方案下,其运行时的定位精度约为0.43 m,其姿态定位精度约为0.6°,完全能够满足对采煤机自动化控制定位精度的要求。
2)该定位方案在x轴方向上的误差精度约为0.28 m,在y轴方向上的误差精度约为0.41 m,在z轴方向上的误差约为0.31 m,定位精度好,姿态追踪稳定性高。
3)仿真分析结果和试验验证结果吻合度高,表明了该基于SINS 的采煤机的动态定姿技术对采煤机井下位置、姿态定位的适用性。