基于Arduino 板控制的蚕蛹切割机的设计
2020-07-31穆德敏郭庆善戴诚霖周绍驰徐志好崔俊琰袁禛嶽
穆德敏,郭庆善,戴诚霖,周绍驰,徐志好,崔俊琰,袁禛嶽
(1.沈阳工学院辽宁省数控机床信息物理融合与智能制造重点实验室,辽宁 抚顺113122;2.沈阳工学院机械工程与自动化学院,辽宁 抚顺113122)
辽宁省丹东市是全国的柞蚕生产基地和丝绸工业基地,放养规模和蚕茧产量分别占全国的25%和全省的40%。近年来科学养蚕水平进一步提高,农民收入显著增加,主要部分来源于蚕蛹,因其营养价值高[1],深受市场的喜爱。但是目前蚕蛹脱壳环节主要采用手工作业,去壳效率不高,严重制约着当地蚕蛹市场的快速发展,为了提高加工效率,解决劳动力低下的问题,有必要研究去壳设备,并采用自动切割方式实现全自动加工[2,3]。同时也是为了更好的建设社会主义和谐社会,使蚕蛹的美食走进千家万户,从而进一步的提高蚕农的收入。
为了提高蚕蛹的利用率和蚕蛹食用的适口性,可以在蚕蛹食用之前把蚕蛹和外壳分离,这样不但提高了蚕蛹食用时的风味[4],而且提高了利用价值。本设计采用机械的方式使蛹皮和蛹体分离,重点从蚕蛹切割机的结构、夹持机构以及操作控制三方面进行说明。
1 蚕蛹切割机的结构
首先运用SolidWorks 三维软件进行结构设计,结构设计的方案如下:蚕蛹统一存放在一个储物桶内,出料采用震动盘结构,利用震动的原理,使蚕蛹按一定顺序留出,通过皮带传送将蚕蛹送至切割机构,蚕蛹的切割过程模仿人手的动作,利用机械手机构来实现,切割完成之后,机械手增加一个抖动的动作,实现蛹与壳的分离,在设备的下方增加收集蛹与壳的回收装置,通过上述动作实现蚕蛹的全自动加工,机构的效果图如图1 所示。
根据蚕蛹的重量轻,体积大的特点,配备了大型的储物桶,每桶可以容纳100kg 的蚕蛹,另外,可以通过传送线的形式,将蚕蛹源源不断送至储物桶,便于实现自动化切割。本次设计配备了一套切割机构,可以根据实际产量的需要,增加多个切割机构,实现更快的加工效率。

图1 蚕蛹切割机外观效果图
2 蚕蛹切割机的夹持机构
蚕蛹壳的特点是大小不一致,壳比较薄,与内部的蛹距离较近,因此,在切壳的过程中,为了保证蚕蛹不被切破,需要采用专用夹持机构,即可以保证蛹不被切破,又可以实现蛹和壳成功分离,所以设计了此套结构,在电机的带动下,利用杠杆原理,模仿人手方便灵活动的特点,实现一系列动作。
加工过程如下所述。传送到机械手切割部分时,超声波传感器检测到有蚕蛹送到,机械手抓取蚕蛹并移动至刀头位置,用特制刀头切割,切完后使用机械手实现“倒水”动作,将蚕蛹倒出,机械手松开外壳。工序完毕,机械手采用海绵材料,防止对蚕蛹的损伤。刀头为特制刀头,切割蚕蛹的前1/3处,快速且不伤蚕蛹。
3 Arduino 板控制
在全自动蚕蛹切割机的电气控制系统中,通过Arduino 板来控制整个系统及用于控制继电器、直流电机、机械手等,包括继电器起到弱电控制强电的作用下,用于连接Arduino 与电机和振动器,并使Arduino 输出的5V 电压能够控制振动器和电机。Arduino 能通过各种各样的传感器来感知环境,通过控制灯光、马达和其他的装置来反馈、影响环境。板子上的微控制器可以通过Arduino 的编程语言来编写程序,编译成二进制文件,烧录进微控制器,因此可以实现控制继电机、直流电机、振动机的具体动作过程。
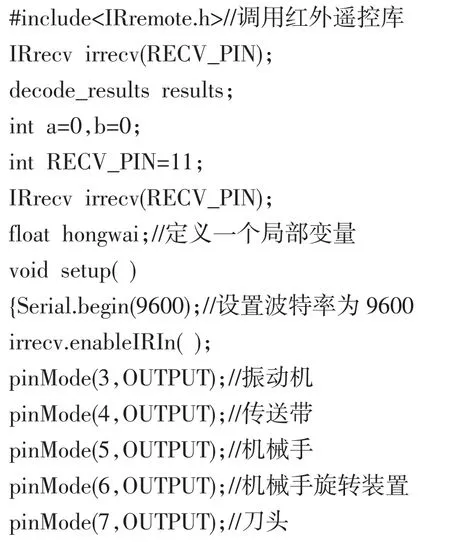
其中红外遥控模块负责给Arduino 板子发送指令执行所有程序,超声波检测模块用来检测蚕蛹,实现过程控制的主要程序如下:

4 结 语
本机构经过三维设计,并模拟动作过程,解决了装配过程中干涉问题,进一步优化结构提供依据。
采用电动机械手实现蚕蛹的切割,运用Arduino 板控制各动作,操作简单可靠,性价比高。
通过此结构设计,可替代人工,不仅可以降低工人的劳动强度,而且还可以提高生产效率,助力振兴当地经济。
