联网无人机事故多风险耦合研究
2020-07-30李晓晗王慧莹程旭付帅佀庆民
李晓晗 王慧莹 程旭 付帅 佀庆民


摘 要
运用 STAMP模型对无人机事故分析,挖掘关键事故致因,研究低空联网无人机飞行事故多风险因素耦合关系,从而促进无人机监管的完善,加速无人机应用的创新和发展。以及提高行业安全管理水平。
关键词
无人机;安全分析方法;STAMP;风险矩阵法
中图分类号: V279;V328 文献标识码: A
DOI:10.19694/j.cnki.issn2095-2457 . 2020 . 17 . 24
0 引言
无人机(Unmanned Aircraft,UA)是由控制站管理(包括远程操纵或自主飞行)的航空器,也称远程驾驶航空器[1]。近年来,无人机产业发展不断加快,并逐渐从军用领域延伸到了民用领域。中国无人机近五年市场规模增长迅速,如图1所示[2]。
随着无人机市场规模不断扩大,无人机安全事故也不断发生并有所升级。2017年1-4月,杭州萧山机场、重庆江北机场、成都双流机场等多次遭遇民用无人机的干扰,导致多个航班取消、延误或者迫降其他相邻机场,严重影响了社会安全,造成重大经济损失;2018年4月,山东某地出现违规使用民用无人机发生故障坠落引起了山区森林火灾。
运用系统理论事故模型与过程(STAMP)、风险矩阵(RM量化模型)等方法,可以分析无人机在运行中的事故发生率,从而促进无人机监管的完善,因此对无人机安全飞行风险的研究和评估是十分必要的。
1 无人机事故耦合研究机理
1.1 层级控制结构模型
依据STAMP模型工作原理,将系统作为一种层级控制结构进行分析。其中高层次系统对低层次系统的行为进行安全约束,低层次将其运行的结果反馈给高层次,使高层次系统对决策进行调整。在无人机事故研究中,将操纵者作为控制层,无人机作为执行层,系统通过各个层次处于一种受控的平衡状态[3]。
1.2 STAMP工作机理
STAMP是以系统理论的过程分析方法为基础,所提出的安全性分析方法。STAMP的工作机理主要分为三个部分:安全约束、分层安全控制结构和过程模型。该方法认为事故的发生是由于缺少安全约束或控制执行不充分。在STAMP中,系统是一个动态过程,随变化持续运作。因此,依据STAMP模型分析事故的主要包括以下几个环节:识别系统危险以及安全约束;构建系统分层安全控制结构;找出控制结构中的控制缺陷及违反安全约束的控制动作。
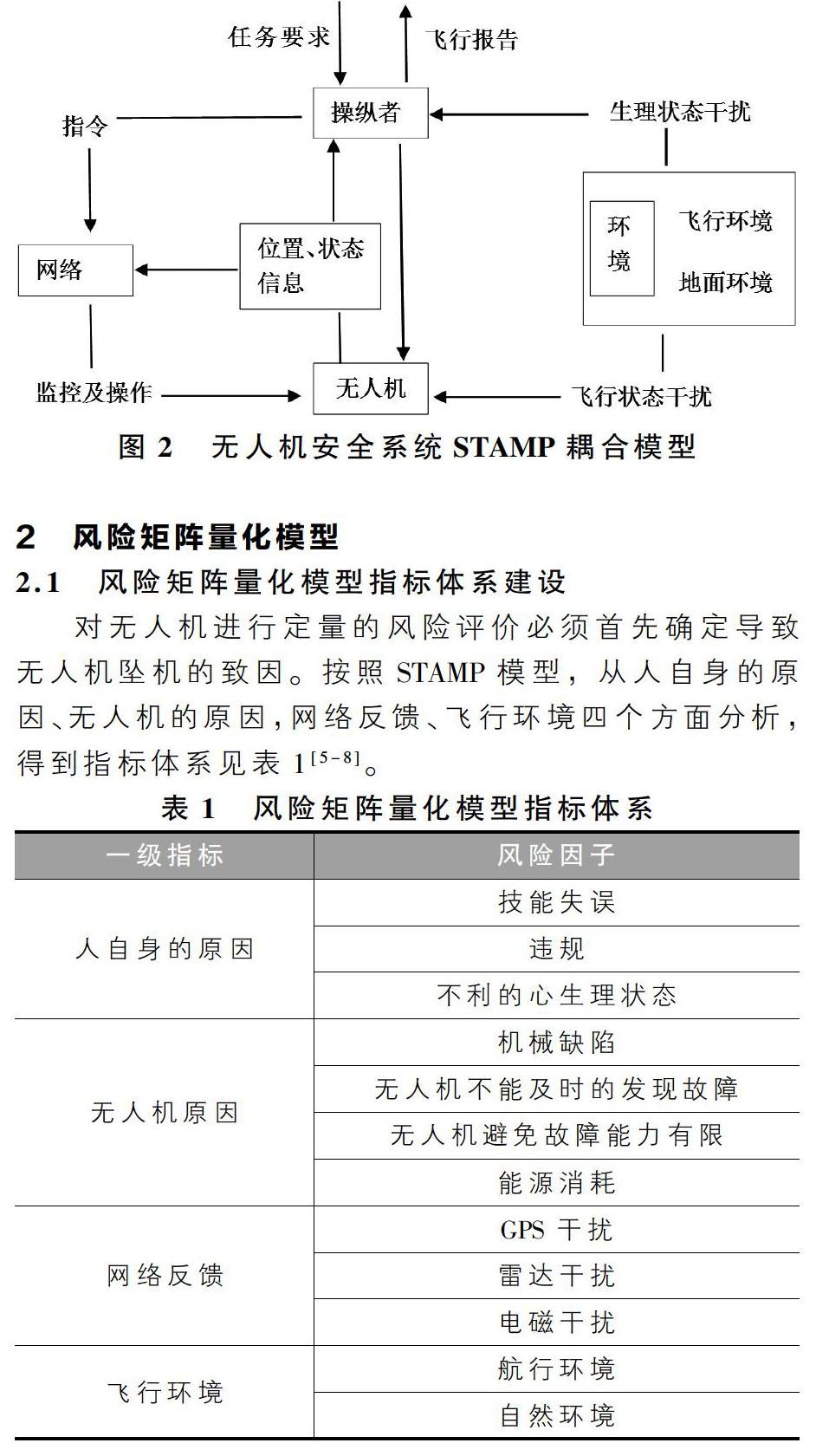
1.3 无人机安全系统STAMP模型
基于历史数据获得无人机飞行中存在的风险, 提取出主要安全风险因子包括操纵者、无人机、网络和环境。这些风险相互影响,相互作用, 形成耦合关系,建立无人机系统的STAMP模型[4]如图2。
2 风险矩阵量化模型
2.1 风险矩阵量化模型指標体系建设
对无人机进行定量的风险评价必须首先确定导致无人机坠机的致因。按照STAMP模型,从人自身的原因、无人机的原因,网络反馈、飞行环境四个方面分析,得到指标体系见表1[5-8]。
2.2 风险矩阵量化模型
风险矩阵法是一种定性的风险评估分析方法,综合评估危险发生的可能性和伤害的严重程度的风险大小,是一种将风险可视化的工具,主要用于风险评估领域。对事故场景风险,可根据场景频率计算结果和后果等级,使用定量数值风险标准、风险矩阵等形式进行风险等级评估。风险矩阵量化是通过风险的两个维度来分析:发生频率与一旦发生所造成后果的严重程度[9]。
风险因子是矩阵分析的基础,通过定性分析将风险因子分为12个因素,按照每个因素的重要程度刻画事故发生的可能性和严重度,作为风险矩阵中行和列的指标,得到风险评价表见表2。
3 结论
随着无人机技术的发展进步,对无人机总体参数性能要求将会越来越高,其中如何有效运用安全系统的思想,降低无人机事故率,有效预防各种不安全因素已成为当前不容忽视的重大课题。
本文通过对无人机在5G低空联网背景下事故多风险耦合关系进行研究,提出使用STAMP模型构建无人机安全系统指标体系,并对无人机事故进行安全性定性分析,可以更加全面地识别无人机飞行过程中不安全因素及其原因,逻辑清晰、定位精准。并综合危险发生的可能性和伤害的严重程度,通过风险矩阵直观的反映了各个风险因素导致事故发生的权重。上述无人机事故多风险耦合研究可为今后无人机研制及试飞过程提供相应的参考。
参考文献
[1]中国民用航空局飞行标准司.《轻小无人机运行规定》(试行).AC-91-FS-2015-31[R].北京:中国民用航空局飞行标准司,2015.3-5.
[2]前瞻产业研究院.《中国无人机行业市场需求预测与投资战略规划分析报告》[R].2010,2-20.
[3]胡剑波,郑磊.航空维修安全监察的安全性分层监督控制模型与分析[J].安全与环境工程,2016,23(6),0135-08.
[4]陈浩然,崔利杰,任博,等.基于STAMP的试飞安全指标体系构建方法[J].火力与指挥控制,2019,44(02):54-59.
[5]高俊杰.无人机安全飞行风险评估研究[D].中国民用航空飞行学院,2018,13-14.
[6]林晓烘,张春雷,王琳琦,等.掩护突防中雷达干扰无人机最优配置方法[A].2018.11-0033-05.
[7]何磊,罗兵,吴文启.基于DGPS航迹偏差的多旋翼无人机磁干扰检测技术研究[A].2017.25(10),39-42.
[8]何丽莎,郑耀,解利军,等.环境风对特定无人机零长发射安全性的影响[J].哈尔滨工程大学学报,2019,40(07):1201-1207.
[9]胡洁,方书昊,齐涵,等.事故树-风险矩阵评估高校实验室火灾风险[J].安全,2019,40(5),24-29.
