400 000 DWT智能矿砂船冗余导航系统设计方案
2020-07-30陈立朱兵
陈立,朱兵
(上海船舶研究设计院,上海 201203)
近几年,随着我国智能船舶的发展步伐不断加快,国内多家科研院所及企事业单位突破多项关键技术,实现了智能船舶核心设备国产化。对于新研发的智能系统,船东公司既希望通过新技术提升船舶运作能力和营运效率,降低营运成本;又担心新系统新设备带来的不确定安全风险,对船舶营运管理带来诸多不便。智能导航系统作为智能船舶的核心系统,是影响船舶安全的重要一环。为了权衡上述利弊,上海船舶研究设计院联合国内外知名导航系统集成商,依托“智能船舶1.0研发专项——超大型智能矿砂船示范应用”项目,对冗余导航系统进行可行性论证和专项研发,解决了其中多项关键技术,实现了主要导航设备“互为备用”的能力,保证智能船舶导航系统的可靠性和安全性,在实船上实现两个不同架构的导航系统共存共用。
1 导航系统冗余设计思路与流程
1.1 导航系统冗余设计思路
根据船东营运需求及公约、规范对船舶的航行安全要求,梳理需要冗余设计的导航设备清单。如遇旧船改造或船舶需要保留原有导航系统的情况,需从系统架构、实船布置等角度分析新增冗余导航设备可能会对原有导航系统产生的影响。对分析后的冗余设计方案进行可靠性、安全性评估。对于需要升级更换的产品应重新由船级社审核认证。导航系统冗余设计思路见图1。
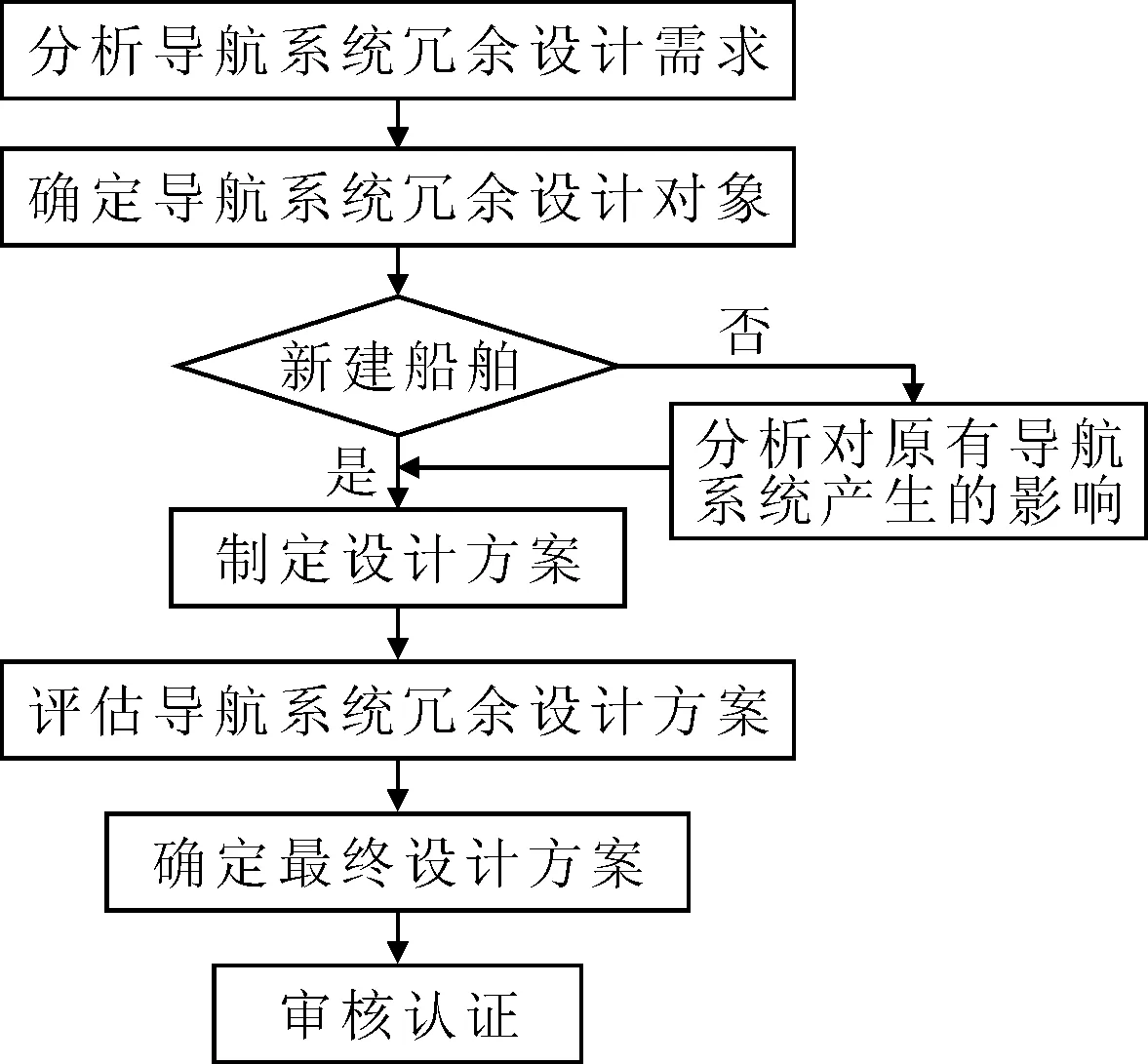
图1 导航系统冗余设计思路
智能400 000 DWT VLOC在第二代常规400 000 DWT VLOC的基础上通过智能化升级而成,入级挪威船级社(DNV GL)和中国船级社(CCS),满足双船级社一人桥楼规范要求[1-2],并同时获得CCS智能船符号i-Ship(N,M,E,I)和DNV GL智能船符号SmartShip(OE,PE,CME)。
经对实船情况充分论证,并考虑到船东营运需求,认为导航系统中的雷达、电子海图、舵控系统进行冗余化最为必要,也最有价值。主要导航设备变化对比见表1。
由表1可见,导航系统配置的变化、控制台布置的设计,以及冗余导航设备的切换设计是整个冗余导航系统设计成功的关键。为满足一人桥楼所配置的航迹规划站及综合显示单元则是简单的品牌变换,下文不再赘述。

表1 常规400 000 DWT VLOC与智能400 000 DWT VLOC主要导航设备对比
1.2 导航系统冗余设计流程与要素
导航系统的冗余设计并不会破坏2套导航系统各自的连接方式和功能,只是在同类设备的共用共存上进行设计研究,保证冗余设备各自的正常运行与操作,因此,该系统内的导航设备本身无需重新认证,减轻了整个方案认可的工作量。
在制定导航系统冗余设计方案时,在分系统考虑导航设备内部设计的基础上,结合全船情况综合考虑驾驶室布置与天线布置等设计,并形成完整的导航系统冗余设计方案,导航系统冗余设计流程与要素见图2。

图2 导航系统冗余设计流程与要素
1.2.1 切换逻辑设计
冗余导航系统主、备用系统之间的切换逻辑及操作流程,包括切换条件、切换方式、切换顺序、应急措施等。
1.2.2 切换装置设计
完成冗余导航系统主、备用系统切换的关键部件,包含系统与布置设计,其设计应以安全、可靠为基本原则。
1)简化内部连结机构。
2)缩短切换单元与控制单元的距离。
3)减少可能的故障点。
4)优先考虑机械式的切换装置。
1.2.3 通信接口设计
统一冗余导航系统之间的通信方式,实现信息共享。传输实现系统功能所需信息、互锁信息、状态及报警信息等。通信接口设计应保证通信的完整性、实时性、可靠性。
1.2.4 人机交互设计
提供安全、便捷的操作方式,在合适的位置通过有效的报警方式提醒操作人员,并且通过适当的交互方式降低人员误操作的可能性。
1.2.5 天线布置设计
综合布置全船导航设备的天线,避免因信号干扰、遮挡导致功能缺失或性能降低,保证导航系统的正常运行。天线布置设计的方法及流程如下。
1)分别确定各天线的性能参数,包括通信频率、发射功率、外形尺寸等。
2)根据干扰的强弱程度,确定天线布置位置的相互间距。
3)为防止对人体产生辐射影响,对于大功率发射设备需标示出安全区域。
4)为避免交叉造成盲区和干扰,需根据雷达发射波束的形式、角度确定其位置。
5)通过分析天线增益阻抗确定电缆敷设长度限制。
6)结合实船雷达桅结构和天线布置,综合考虑大重量设备对结构振动及对航行信号灯遮挡等影响,并形成天线布置设计方案[3]。
1.2.6 驾驶室布置设计
将导航系统及其他桥楼设备合理的布置在驾驶室内,满足船级社对于航行安全及一人桥楼等要求。
在确定驾驶室布置及工作站设置的基础上,结合工作场所环境要求,确定工作站的设备配置及桥楼设备的配备要求(包括位置、电源、设备接口等要求),形成驾驶室布置设计方案[4]。
2 冗余算法设计及实现
2.1 冗余舵控系统
2.1.1 冗余舵控系统的逻辑设计
冗余舵控系统逻辑设计思路见图3。在设计过程中需注意以下两点。

图3 冗余舵控系统逻辑设计思路
1)完整切换,权限变更。当某套舵控系统中的任一控制单元出现故障时,只有将所有控制单元的权限都切换至另一套舵控系统,才能真正实现双套舵控系统的切换。
2)切换失败,权限不变。在切换过程中,如发生控制单元权限未完全切换至另一套舵控系统的情况,此时船舶舵控权限不发生变动,并且在操舵位置发出报警,提醒船员检查,直至符合系统切换要求。
2.1.2 冗余舵控系统的工程实现
400 000 DWT智能矿砂船设有4套舵机,船舶正常航行时,通过海兰信提供的主用自动舵控制系统实现操舵;当海兰信设备发生故障时,船员通过TKC提供的备用自动舵控制系统实现操舵。
1)冗余舵控系统的通信接口设计。本船双套舵控系统的切换由报警控制单元、报警显示单元及4个操舵切换单元组成。同时,为了保证操作切换单元时船员能实时观察舵机泵组及2家舵控系统控制箱的工作状态,4个操舵切换单元选择在舵机舱就地布置。系统架构见图4,通过操舵切换单元,舵机与在用的舵控系统完成包括电源、运行信号、限位信号、液压闭锁信号在内的通信。

图4 双套自动舵切换系统架构
2)冗余舵控系统的切换装置设计。操舵切换单元通过旋钮选择一套在用舵控系统,为防止误操作,当且仅当4个操舵切换单元同时切换至备用舵控系统时,控制权限才得以完成切换,操舵切换单元外形见图5。

图5 操舵切换单元外形
3)冗余舵控系统的人机交互设计。报警控制单元与显示单元布置在驾控台。当发生泵组相关报警或内部故障报警时,报警指示灯将闪烁,同时伴有报警声音。
4)冗余舵控系统的舵机连杆设计。为了将舵角信号分别送至海兰信及TKC舵控系统,400 000 DWT智能矿砂船的舵杆分别通过5根舵杆连接至2个海兰信舵角反馈单元、2个TKC舵角反馈单元,以及1个舵角指示器反馈单元,相比于常规400 000 DWT矿砂船多出2个连杆及2个舵角反馈单元。舵机连杆安装示意见图6。

图6 舵机连杆安装示意
2.2 冗余雷达系统
2.2.1 冗余雷达系统的逻辑设计
为避免因主、备雷达系统的天线同时工作而产生的波束干扰,需要设计冗余雷达系统的切换逻辑。
当主雷达系统发生故障或因船舶航行需要切换至备用雷达系统时,船员先按关机流程关闭故障雷达系统,随后旋转切换装置,通过继电器断开主雷达系统的电源,同时闭合备用雷达系统电源,并由船员按照开机流程打开备用雷达系统,实现冗余雷达系统之间的切换。见图7。

图7 冗余雷达系统的逻辑设计
2.2.2 冗余雷达系统的工程实现
1)天线布置设计。根据雷达天线的安装要求,应上下错开安装,避免天线波束互相影响。同时,根据IMO法规要求,在雷达波束范围内应避免障碍物遮挡,总盲区总和不大于20°,被阻挡单个盲区不得超出5°;并且船艏盲区不大于2倍船长和500 m中较小者。
400 000 DWT智能矿砂船共配备双套X波段雷达及双套S波段雷达。本船长约300 m,由于受到艏部视线限制、雷达桅结构造成的视线限制、雷达天线波束干扰角的限制及船舶其他天线干扰范围限制,本船在艏部桅杆布置1台海兰信X波段雷达,在艉部雷达桅布置1台海兰信S波段雷达及JRC的2台雷达。通过电源互锁的方式,确保同一时刻下单台S波段雷达处于运行状态,避免2台S波段雷达因同时运行而造成的波束干扰。艉部雷达布置见图8。

图8 智能400 000 DWT VLOC雷达桅雷达布置
2)切换装置设计。400 000 DWT智能矿砂船在主驾控台内设有1套S 波段雷达电源切换装置,用于互锁2台S波段雷达电源,系统架构图见图9。船用分电箱分别向海兰信及JRC的S波段雷达供电,通过位于驾控台的旋转开关触发互锁信号,当旋转开关调至海兰信S波段雷达,则自动切断JRC的S波段雷达电源供电,反之亦然。

图9 S波段雷达互锁系统架构
2.3 冗余电子海图系统
冗余电子海图通信设计的关键在于统一通信协议和共享航线数据。受限于对数据安全的保护,TKC电子海图的航线数据尚未对外部系统开放。因此,在400 000 DWT智能矿砂船上采用的是通过移动存储介质拷贝航线数据的方式实现信息共享。
2.4 航行数据记录仪
航行数据记录仪(VDR)的设计关键在于通信接口的数量、存储容量及图像数据清晰无失真。根据船级社规范要求,船上所有雷达及电子海图的图像信号都应传输至VDR。由于冗余导航系统配置的雷达、电子海图等设备数量比常规船舶的配置多1倍,因此,VDR的图像采集接口数量也需要翻倍,并且所有存储器容量需要相应加大。而对于设备认证、由于没有改变原有VDR的功能,仅需要进行硬件升级认证即可。
2.5 驾驶室布置设计
考虑到主用的海兰信导航系统需要满足DNV船级社一人桥楼的相关要求,尤其是工作站布置要求对驾控台布置的影响,且雷达、电子海图、舵控系统等均是大尺寸导航设备,常规的单驾控台难以全部承载,因此,特别在主驾控台后方增设一个新的驾控台作为备用驾控台来专门承载备用的JRC和TKC导航设备,这些备用导航系统及控制台仅须满足SOLAS第五章关于航行安全的基本要求。
当主导航系统发生故障时,船员可按操作程序切换至位于备用驾控台的备用导航系统。待主导航系统修复后,可再次切换至前方主驾控台,恢复一人桥楼以及智能航行功能。
主要导航设备布置见表2,驾驶室布置见图10。

表2 400 000 DWT智能矿砂船主要导航设备布置位置

图10 400 000 DWT智能矿砂船驾驶室布置
3 结论
400 000 DWT智能矿砂船自2018年11月正式交付营运起,其安装的冗余导航系统运行稳定,获得船东高度评价。通过互为备用的设计更好地
保障船舶的航行安全;同时,也为船舶营运管理提供便利,提升船舶营运效率,有效平衡智能系统实船应用带来的利弊。
随着智能化技术在航运领域的应用,将会有更多的船东公司有意向将旧船改造成智能船舶。通常会采用保留原有的基础导航系统,并在此基础上新增1套智能导航系统的新模式。本文提供了2个不同架构的导航系统的设计方法,可以为智能船舶设计及改建提供参考,具有一定通用指导性。
