飞马V100无人机航测在党河水库除险加固工程中的应用
2020-07-27曹晏维
曹晏维
(甘肃省水利水电勘测设计研究院有限责任公司,甘肃 兰州 730000)
0.概述
2019 年9 月受敦煌市水务局委托,甘肃省水利水电勘测设计研究院有限责任公司开展党河水库除险加固工程初步设计阶段的勘测设计工作。党河水库位于甘肃省敦煌市区西南36km 处的党河峡口内,是一座以防洪、灌溉、排沙为主兼顾发电的中型水库,总库容4.64×107m3,坝址以上控制流域面积16600km2,多年平均径流量2.927×108m3。测区左岸有敦煌至阿克塞G215 道路通过,右岸无道路。
水库大坝1∶500 地形图测图范围按主副坝左右岸两侧各100m,坝轴线上游100m,下游至溢洪道与党河交汇口截止,测图面积约1.3km2。地形图中需标注主坝、副坝、输水发电洞、泄洪排沙洞、溢洪道、电站引水发电系统控制点、线路、主要建筑物纵横断面图的平面位置。同时需标明各建筑物轮廓尺寸、位置关系,现状坝轴线位置。库区1∶2000 地形图测绘面积约7km2,地形图中需标明各建筑物轮廓尺寸、位置关系,现状轴线位置。
1.像控点布测技术路线
本次使用无人机型号为飞马V100,低空无人机作业外业主要包括像控点布设及施测、航飞、飞行质检及外业调绘4 部分组成。
1.1 像控点布设方法
考虑到测区地形实际,采用不规则区域网布像控点,主要以红白相间1.1m 见方的靶标为主,明显地物为辅布设。1∶500 地形图按每平方千米6 个像控点布设,需布设10 个。1∶2000 地形图按每平方千米2 个像控点布设,需布设14 个。在Google Earth 软件中,像控点在上下库范围布设为均匀网状,两点间隔为600-800m,在无人机两个架次相接的重叠地带应针对性布设不少于4 个像控点,以保证不同航高的相片处理时有足够控制点[2]。以布设的Google Earth 图上像控点为基准,根据点位的经纬度放样到实地位置,根据实地情况选取易保存位置埋设靶标。像控点采用两像片控制点的编号大写英文字母加阿拉伯数字组成,像控点编号不得重复,编为XK01、XK02、XK03……XKnn,如XK29,为像控点29 号。
1.2 像控点采用RTK 作业模式
用RTK 作业模式进行施测,按《全球定位系统实时动态测量(RTK)技术规范》中有关要求测定像控点的平面坐标和高程, 采集像控点三维坐标时移动站距基准站距离不大于5km,观测采用平滑10s 采集。在测绘像控点时应在路途中采集特征碎部点以备检查地形图质量时使用。
1.3 像控点精度要求
根据航摄外业规范要求,平面控制点相对邻近基础控制点的平面位置中误差不应超过地物点平面位置中误差的1/5;高程控制点相对邻近基础控制点的高程中误差不应超过基本等高距的1/10。
2.飞马V100 及航测流程
2.1 飞马V100 硬件设施和性能
V100 无人机是飞马推出的基于高性能垂直起降固定翼平台的一站式行业解决方案;无人机航测系统主要包括飞机平台系统、定位定姿系统、信息采集系统、地面控制系统、电源系统等[1]。可“高精度成图”、“专业遥感”、“视频侦察”。起飞重量8.5kg,标准载荷1kg,续航时间90min;可搭载航测模块、倾斜摄影模块、热红外遥感模块、多光谱模块、可见光视频模块、热红外视频模块、双光视频模块;所有载荷均可无工具快速拆装,实现一机多用,具备多元化数据获取能力,并提供系统级解决方案。配备高精度差分GNSS 板卡,支持PPK、RTK 及其融合作业模式,支持POS 辅助空三,可实现免像控1∶500 成图。
2.2 飞马V100 作业流程
建立测区,导入原始数据(POS 文件、相片等);导入控制点文件,根据绘图比例尺、航高等因素,填写相关参数;全自动空三加密,生成并输出DSM/DOM/DLG成果[3]。
2.3 航线规划与参数调整
本次航测任务航线规划在飞马公司无人机管家的智航线中进行,首先导入测区范围,然后根据成图比例尺和现场地形条件限制设置适当的地面分辨率和飞行高度,相关参数(如表1、表2 所示):

表1 航飞相关参数

表2 飞行相关参数
2.4 任务飞行与现场调绘
在航线规划完成后进行了天气查询和空域申请的相关流程,飞行前进行设备检查,确保设备安装和设置正确无误。严格把握天气标准和准确的曝光量。先试照,确定参考曝光量,实际工作中再根据天气实况、地物、地形情况以及参考曝光量,确定实际的曝光量,确保曝光量的准确[4]。
准备工作完成后,即可智飞行中选择区块进行飞行作业。V100 采用垂直起降的方式,飞机全程自主飞行,并进行飞行状态的实时监控。飞行过程监控各飞行参数均正常,巡航时速度基本稳定在18m/s,飞行姿态平稳,滚转、俯仰角度偏差大部分在5°以内,个别影像由于风的影响,在10°左右,也可满足正射影像的成果需求。飞行完成后,进行原始影像、机载POS 数据下载,并完成每个架次的飞行日志的信息填写,为后续的数据整理或问题查找提供依据[5]。
2.5 内业处理与成果输出
飞行完成后进行的机载POS、基站POS 和飞行影像的下载,并现场在无人机管家智检图模块中进行飞行质检,质检结论均满足工程要求。V100 无人机采用先进的后差分处理系统,在无人机管家智理图模块中进行了POS 解算和坐标转化,从而得到了高精度的飞行POS 数据。
然后进入无人机管家智拼图模块导入照片和高精度POS,在空三计算精度满足要求后进行了DSM、DOM、DEM 以及点云数据的输出和编辑,然后在Global mapper 中进行了模型的裁剪和等高线的输出。为保证本次航测任务的精度和可靠性,在使用无人机管家进行空中三角测量加密的同时使用PIX4D 软件进行加密计算,经过比对得到了更加可靠精度高的空三成果,并为后面的4D 产品的输出提供的可靠的基础数据。最后将得到的DLG 在南方公司的CASS 软件中进行地物的绘制和等高线的修整分幅等工作。
3.精度评定
像控点采集的准确性关系到后续空三加密和4D产品的精度,本次像控点采用对中杆整平对中的方式,进行平滑20 次坐标采集,同时拍摄现场测量照片。在完成空三计算后,利用合格的空三成果进行DSM 和DEM 以及DOM 的生产,现场采集了部分碎步点作为检查点,同时对影像上没法判别的输电线和通讯线进行了现场采集,对于坝址区溢洪道、排沙洞等重要水工建筑物的高程进行了现场采集,像控点精度评定(如表3 所示)[6,7]。
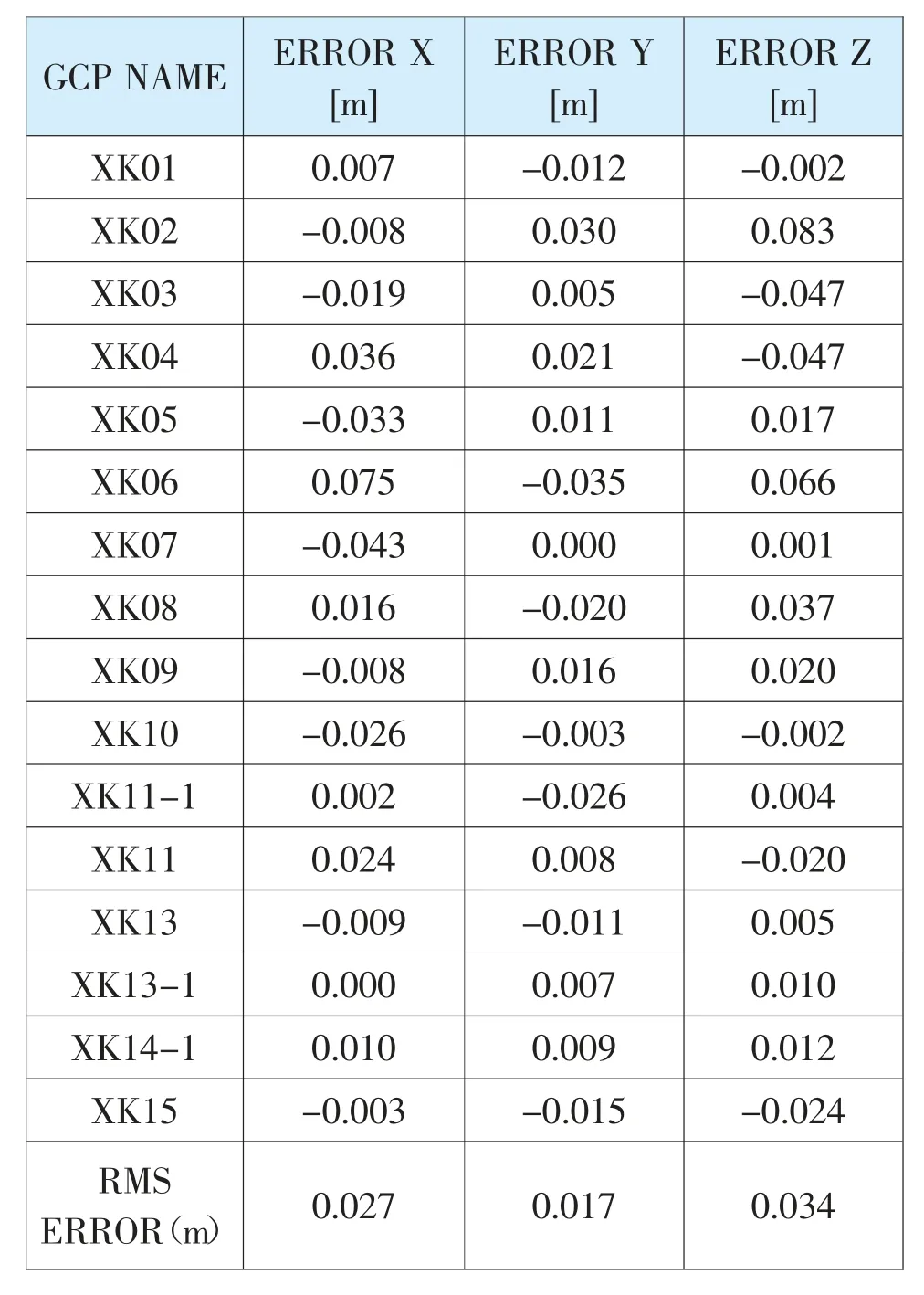
表3 像控点精度评定
经空三计算得到相控点的平面精度X 方向为0.027m,Y 方向为0.017m,高程精度为0.034m,满足技术设计的相关要求,现场选取了部分房角和道路拐点作为DOM 平面精度的检查数据,均达到了技术设计书的设计要求。
4.创新应用
4.1 多软件交互使用
飞机的外业飞行使用无人机管家的智航线和智飞行模块,然后使用智检图模块进行数据的预处理和重叠度检查,内业加密使用智理图和智拼图,在使用点云数据进行DEM 生成之前采用智点云模块进行点云数据的过滤和地面点的提取,后使用Global mapper 软件进行等高线的生成和滤波,最后使用南方公司的CASS9.0 软件进行数字线划图的提取和修测。
结合每个软件不同的特点和优势,将数据分别导入不同的数据处理软件可以最大程度的发挥软件的功能,同时能够提高作业的效率。
4.2 大面积长航程
本次作业面积大,飞行时间长是本次作业的特点,且本次库区测量需要多期测量进行库区淤积量的计算,所以靶标的埋设都选择在易于保存的地方,在保证飞行安全的前提下本次飞行采用V100 系列飞机的“断点续飞”功能,能够在保证飞机电量充足的前提下多次飞行进行测区影像的采集。
5.结束语
结合项目实际情况发现本次航测任务中存在一些问题需要解决,例如水面匹配点较少在后续的建模过程中容易产生数据空洞;对于重要建筑物如泄水闸的建模仍然需要地面补拍部分照片来进行精细建模;由于物理带宽网速的限制使数据的集群处理难以达到理想的工作效率,拟建立万兆网和磁盘资源共享的方法提高航测数据处理的效率,真正使无人机航测成为测绘行业的主流作业方法。我们有理由相信,采用无人机测绘新技术会在科技发展的浪潮中不断创造新的更大价值。