机载激光雷达技术在林业资源调查中的应用
2020-07-27骆生亮
骆生亮
(山西亚太数字遥感新技术有限公司,山西 太原 030006)
0.引言
激光雷达(Light Detection And Ranging,LiDAR)是一项通过由传感器所发出的激光来测定传感器与目标物之间距离的主动遥感技术。机载激光雷达具有高精度、高分辨率、高自动化、高效率的优势,已成为世界各国进行大面积数字地表数据获取的重要手段。目前机载激光雷达在土地利用、工程建设规划、城市规划管理、海洋测量、防灾、矿业、农业等方面应用广泛。20 世纪80 年代中期激光雷达技术开始逐渐用于估测林业数据参数,主要通过识别三维坐标信息来定量对林业数据参数进行估测,特别是在估测林木空间结构和估计林木高度这方面有其独有的优点。经过几十年的发展,激光雷达技术在林业研究方面的技术已逐渐趋于成熟,采用机载激光雷达数据可以获取林区地理环境、估测平均树高、郁闭度、林分密度、生物量和蓄积量等林业参数[1]。
1.机载激光雷达系统组成
机载激光雷达系统由空中测量平台、数字化激光扫描仪、姿态测量和导航系统、数码相机、数据处理软件等组成。
1.1 空中测量平台
空中测量平台是航空激光扫描测量系统进行作业的空间载体和操作平台,主要为直升飞机或其他飞机,用来搭载航空激光扫描测量系统所需要的各种仪器仪表和操作人员。
1.2 数字化激光扫描仪
数字化激光扫描仪是本系统的核心部分,它主要用来测量地物地貌的三维空间坐标信息。
1.3 姿态测量和导航系统
GPS 接收机、IMU 惯性制导仪、导航计算机构成了姿态测量和导航系统。GPS 接收机采用差分定位技术确定平台的坐标。IMU 惯性制导仪测量航飞平台的姿态,用于对发射激光束角度的校正以及地面图像的纠正。
1.4 数码相机
数码相机拍摄的航片宽度应该调节到与激光扫描宽度相匹配。航片经过纠正、镶嵌可形成数字正射影像。
1.5 数据处理软件
激光扫描系统获取的数据量庞大,由专业数据处理软件处理。
2.机载激光雷达系统原理
机载激光雷达的工作方式和原理,即激光测距系统向探测目标主动发射高频率的激光脉冲,直接获取地物表面的距离、坡度、粗糙度和反射率等信息,经过处理生成高密度的三维空间坐标,即点云(如图1 所示)。激光点云数据的每个点不仅具有x、y 平面坐标信息,还具有高程信息,即z 值,同时还可从不同视角对这些点云进行三维显示、量测,计算点云所表达目标的表面积、体积等[2]。
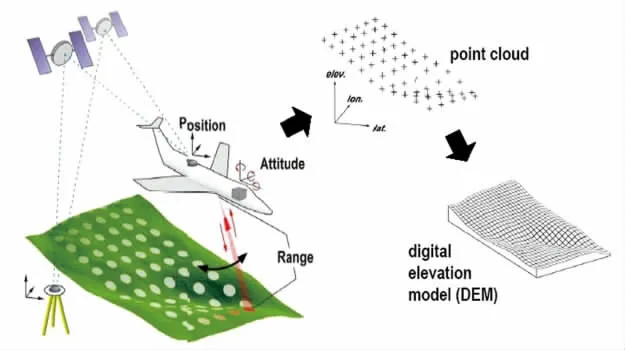
图1 LIDAR 系统原理示意图
3.机载激光雷达技术在林业中的应用
目前遥感技术已大量用于林业资源的管理和普查、动态监测与分析、灾害监测与预报、灾情评估等。但绝大部分遥感传感器只能提供水平分布信息,并不能获得森林垂直结构参数。除此之外,传统遥感技术在森林地区作业时面临着诸多困难:外业控制困难,加密选点困难,影像匹配困难,立体测图困难。而机载激光雷达技术的出现,正好弥补了上述技术领域和区域的缺陷和不足。
3.1 单木分割
当点云密度足以识别单木时,应用不同的单木分割算法对森林回波点进行分割,一旦准确分割后,可以获取树高、树冠尺寸、树冠基部高、断面积、胸径、立木蓄积和生物量等[3]。大部分单木分割算法都是基于冠层高度模型(CHM)。冠层高度模型(CHM)使用分水岭分割算法,自下而上查看,CHM 的高点处可以看成山峰,低点处可以看成山谷,如果用水填充,不同山谷的水将开始汇合,为了避免这种情况,在水汇合的地方建立屏障,这些屏障将决定分割的结果(如图2 所示)。CHM是激光雷达数据在林业中应用的一个重要模型,它是一个表达植被距离地面高度的表面模型,能够提供冠层的水平和垂直分布情况。

图2 CHM 分割示意图
3.2 LiDAR 数据估测平均树高
机载激光雷达估测树高的基本原理是计算激光回波来自树冠顶部和地面的距离差。树高是反映材积和立地质量的重要参数,因此,树高信息的提取具有十分重要的意义[4]。机载激光雷达估测树高分为样地水平和单木水平。单木水平树高估测首先进行单木分割;样地水平树高估测分为直接提取和间接提取,直接提取是测量地面至树顶的高度,间接提取是通过建立冠层高度与机载激光雷达提取的预测变量之间的相关关系来间接估测冠层高度[5]。使用LiDAR360 激光数据处理软件机载林业—高度变量工具,生成林区高度变量统计表(如图3、图4 所示):

图3 LiDAR360 高度变量计算示意图

图4 LiDAR360 高度变量统计示意图
3.3 LiDAR 数据估测叶面积指数(LAI)
叶面积指数是表征植被冠层结构最基本的参量之一,它的定义为单位地表面积上所有叶片表面积的一半。目前利用激光雷达数据进行LAI 反演主要是利用提取的冠层物理参数与实测的LAI 数据构建统计关系模型进行估测。这些物理参数间接地反映了激光点云在冠层中的分布,而LAI 激光在冠层中的穿透和拦截有关。激光穿透指数(地面点数目与所有点数目的比值,LPI)与激光拦截指数(一般指树冠层激光点数目与所有点数目的比值)较多地应用在激光雷达数据反演森林LAI 中。使用LiDAR360 激光数据处理软件机载林业—叶面积指数工具,计算林区叶面积指数(如图5所示):
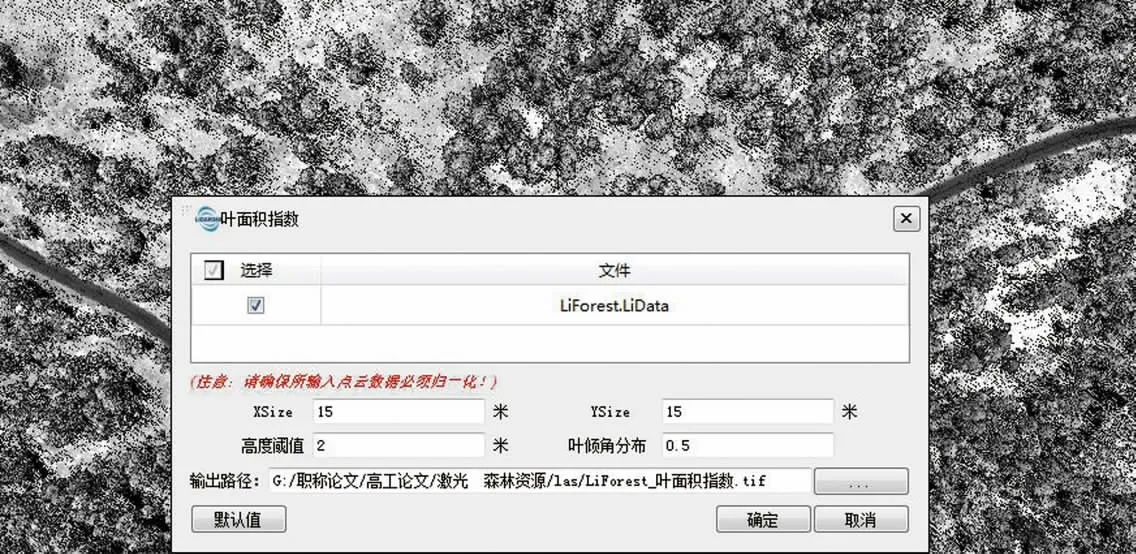
图5 LiDAR360 叶面积指数计算示意图
3.4 LiDAR 数据估测郁闭度
郁闭度是林分冠层的垂直投影占林地面积的百分比,在森林经营管理中,郁闭度是确定抚育采伐强度的重要指标,也是进行森林蓄积量估测不可或缺的因子。郁闭度的估测还可以直接计算林分内植被回波数和地面回波数的百分比,100%则表示林分内树冠密集,没有开阔空间,反之则表示完全是开阔地。理论上通过计算非地面点的回波即可得到一定林分内的树冠郁闭度,要得到地面回波需要进行点密度分析。Dickie 用ARC/INFO 生成地面点/非地面点比值密度栅格图像,通过点密度栅格单元建立地面点密度增加和树冠郁闭度减小之间的联系,从而获取树冠郁闭度信息。使用LiDAR360 激光数据处理软件机载林业—郁闭度计算工具,计算林区郁闭度(如图6 所示):
图6 LiDAR360 郁闭度计算示意图
3.5 LiDAR 数据估测林分密度
经过识别树冠顶部来获取单位面积内的树木棵数就是林分密度。所以,研究的重点就是树冠的分割。首先要用机载激光雷达数据形成树冠高模型,然后,选择变化的窗口在局部进行最大值的搜索,将高程值中最大的激光点作为树冠顶部。圆形状和矩形状是搜索窗口的主要形状,树的高度影响着窗口大小,树高增大冠幅就增大随之搜索窗口就越大,利用变动的窗口来求局部最大值识别树顶用来估计各样板地的树木株数,从而估测各样板地林分密度。
4.LiDAR 数据在林业中应用存在问题
4.1 测量精度不高
用激光雷达调查森林立木蓄积,有两种方法,一种是单株树法,这个方法好比X 光能把人的骨头架子透视出来一样,对主林层的树木预测很精准,但对受到遮蔽的下林层树木,会存在漏测和误测的问题;另一种方法是样地法,这种方法效率高,缺点是对主林层立木蓄积的预测精度不如单株树法。
4.2 布设样地工作量大
为提高估测精度必须在飞行区内设置一些样地,进行人工调查,再据此拟合统计预测模型并编写运算程序。因此,激光雷达调查的精确性,终归还是取决于抽样调查方案以及样地实测。所以,样地调查的质量是关键。样地调查工作量巨大。
4.3 成本高
机载激光雷达的调查成本高,如果是第一次并且小面积地使用激光雷达技术,成本比较昂贵。调查区的规模越大,单位面积的均摊成本越低。
5.结束语
随着LiDAR 传感器的不断进步,采集地表点密度的逐步提高,单束激光可接收回波数目的增多,LiDAR数据将提供更为丰富的地表和地物信息。就光斑大小和间隔而言,脉冲发射频率和分辨率将会继续提高,更加适应不同类型的地形。利用LiDAR 数据构建的三维虚拟现实系统将具有更为理想的现实模拟表达能力,其可靠程度也进一步提高。在此基础之上进行更为精细的林地参数分析,如树高、郁闭度、林分密度、生物量和蓄积量等,并对其做进一步地研究和应用将可获得更为理想的结果[6]。
