一种基于可见光植被指数的高分辨率影像林地提取方法
2020-07-26王树琪朱大明张述清常方敏王涛
王树琪 朱大明 张述清 常方敏 王涛

摘 要:针对高分辨率可见光波段影像植被提取时,因缺少近红外波段引起参考不足的问题,利用植被在可见光方面的光谱特性,实现对可见光波段植被自动化提取与初步分类。在可见光植被指数已有研究的基础上,利用第三次全国土地调查的0.5m正射高分辨率DOM,将不同植被指数带入计算,从一系列可见光植被指数中选取一组最优植被指数。通过筛选,选用RGBVI指数进行实验。检测结果证明,RGBVI-Ostu方法在第三次全国土地调查底图中提取林地植被精度高达91.26%,由此证明该方法使高分辨率可见光植被指数林地识别更精确。
关键词:高分辨率;可见光植被指数;三调底图;RGBVI-Ostu方法
DOI:10. 11907/rjdk. 192334 开放科学(资源服务)标识码(OSID):
中图分类号:TP317.4 文献标识码:A 文章编号:1672-7800(2020)007-0232-04
Forest Extraction Method Based on High-resolution Visile Light Vegetation Index
WANG Shu-qi1,ZHUN Da-ming1, ZHANG Shu-qing1,2, CHANG Fang-min1, WANG Tao3
(1. Faculty of Land Resource Engineering,Kuming University of Science and Technology, Kunming 650093, China; 2. Yunnan Institute of Planning and Design of Land Resources; 3. Yun Jindi Geo-information Technology Co., Ltd,Kunming 650000, China)
Abstract: In the process of vegetation extraction from high-resolution visible band images,the lack of near-infrared band leads to the problem of insufficient parameters. The automatic extraction and preliminary classification of visible band vegetation are realized by using the spectral characteristics of vegetation in visible light. Based on the existing research of visible light vegetation index,we used the 0.5m ortho high resolution DOM of the third nationl land survey. Different vegetation indexes are substituted into the calculation, and a group of optimal vegetation indexes are selected from a series of visible light vegetation indexes. Through screening, the index of RGBVI was selected for the experiment. The results show that the accuracy of this method is 91.26% in the third nationl land survey map, which proves that the method can make the forest identification more accurate with high-resolution visible light.
Key Words: high-resolution; visible light vegetation index; the third nationl land surveymap; RGBVI-Ostu method
0 引言
由于光合作用下葉绿素对蓝紫光与红光波段的吸收作用,以及对绿色波段的强反射作用,所以绿色植被在蓝红光波段具有低反射率的特点;同时,根据植物波谱曲线,植被在近红外波段高反射的特性,用可见光与近红外波段计算结果反映植被盖度等生物物理参数,是目前植被研究的主流方法[1]。目前植被研究主要基于多光谱或高光谱影像的可见光—近红外波段构建植被指数[2]。对于大多数无人机影像来说,无人机遥感影像具有获取时效性强、分辨率高的特点[3]。但是,无人机影像只具有RGB3个波段,缺少了最能表现出植被特征的近红外波段,使普通无人机影像无法通过传统植被指数方法获取植被覆盖区域面积数据。
众多学者对可见光波段植被遥感进行了大量研究。例如,Torres-Snchez等[4]和Rasmussen 等[5]利用可见光高分辨率影像计算可见光植被指数,对作物盖度进行了研究,最高精度达到83.7%,表明可见光植被指数在农作物管理上具有极大应用潜力;Demetrios等[6] 提出基于手机拍摄的照片,利用ExG-ExR 指数,以零为阈值提取照片中含有植物的区域;Suzuki等[7]利用微型无人机可见光传感器,对试验区进行了多次地面植被遥感监测,表明基于微型无人机影像的可见光植被指数可用于地面植被监测;毛智慧等[8]利用HSL空间模型构建一种基于色调亮度的植被指数,将该植被指数及其它常用的可见光植被指数分别与多光谱数据的NDVI进行相关性比较,再利用受试者工作特征曲线ROC的特点确定阈值,并进行植被信息提取与分析。
上述研究使用的图像数据分别是普通电子相机拍摄的照片和分辨率低于10m的影像。由于第三次全国土地调查下发数据需保密,国家有关部门对下发的无人机影像及卫星影像进行了保密处理,如添加了部分噪声、增加了混合像元等,使相关影像相对于普通无人机影像更加模糊,边界识别难度更大。经过试验,本文提及的可见光植被指数计算结果出现全为0值或第三次全国土地调查下发数据为1值的现象。因此,并不是所有可见光植被指数均可在第三次全国土地調查底图上进行计算。本文创新性地引用一种新的可见光植被指数RGBVI[9],首先计算各像元RGBVI值,然后通过分级自动阈值分割的方法选出各种植被覆盖区域。
1 研究区概况与数据选取
1.1 研究区概况
本文研究区位于宜良县匡远街道境内,属于宜良县城郊区。该地地处北纬24°30′ 36″ ~25°17′ 02″ 、东经102°58′ 22″ ~103°28′ 75″ 之间。该区域属于山地丘陵地形,大部分地区海拔在1 500~1 800m之间,气候为亚热带季风气候,冬春干旱少雨,夏秋多雨湿润,冬无严寒,夏无酷暑。灾害性天气主要是春季常有干旱,秋季偶有低温,冬季时有霜冻。土壤以红壤为主,其次是水稻土和黄棕壤、紫色土、冲击土等,水稻土为县内粮食生产的主要土类。匡远街道属云贵高原亚热带植被区,境内森林植被类型为半湿性常绿阔叶林与针叶林。近代自然植被遭到破坏,动植物种群减少。森林类型多为次生云南松和栎类阔叶林组成的混交林。主要植被类型有云南松和华山松林、河谷灌丛和山地灌丛、禾本科为主的荒草地及耕地。
1.2 数据选取
1.2.1 正射影像选取
本文研究正射影像来自于国家有关部门已处理的第三次全国国土调查DOM影像中宜良县试点区域影像。已知影像共包含RGB 3个波段,空间分辨率为0.5m,平面坐标为CGCS2000国家大地坐标系,高程基准为1985国家高程基准。
1.2.2 数据资料
(1)国家内业提取的变化图斑,主要在最新遥感影像的基础上,结合全国土地调查数据,按照第三次全国国土调查土地现状分类标准,提取不一致图斑,并根据数据库地类影像特征判读土地利用类型。
(2)公司第三次全国土地调查项目部提取的部分地类图斑。
(3)宜良县林业调查数据。源于2007年开展的成果,数据为矢量数据,格式为*.MDB。
2 研究方法与结果分析
2.1 可见光植被指数
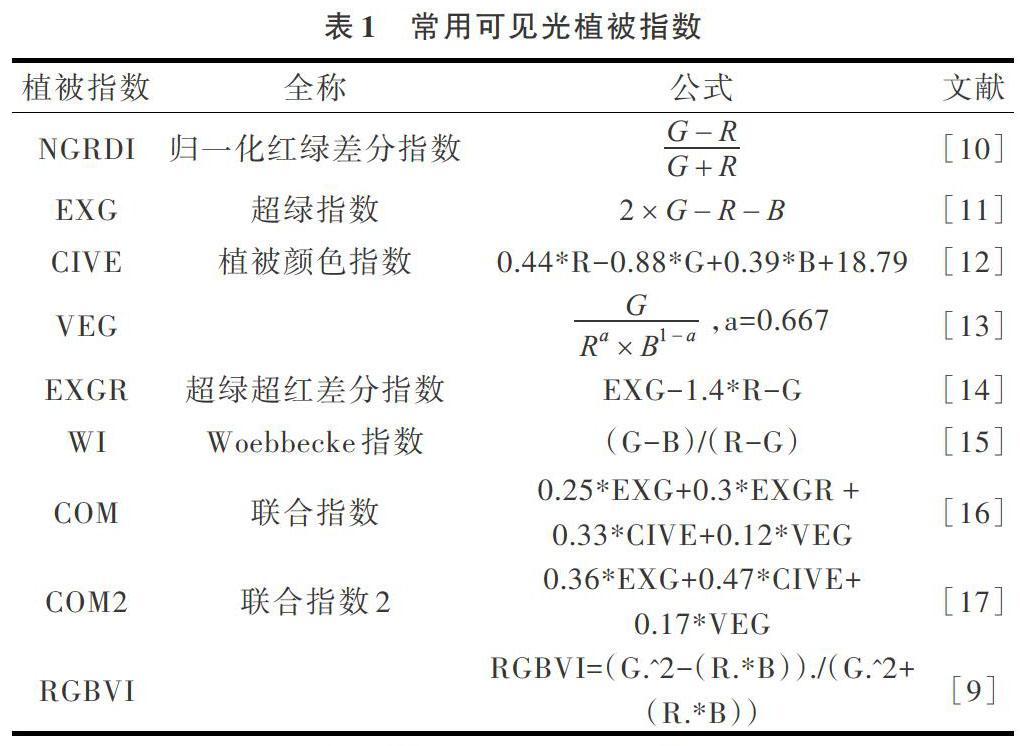
本次实验引入常用的8种可见光植被指数(见表1),利用Matlab R2017a软件的图像处理计算工具,分别计算8种可见光波段图像(见图1)。
其中, R为红光通道,G为绿光通道,B为蓝光通道。
由图1(彩图扫描OSID码可见)可知,前8种可见光植被指数中,对于第三次全国土地调查底图影像,EXGR、COM、COM2这3个植被指数无分类效果;VEG指数分类界限并不明显,主要表现在纯白区域为背景以及植被覆盖区,灰色与黑色区域为房屋区;NGRDI指数图中浅色区域为植被覆盖区,深色区域为非植被区;EXG指数黑色区域为部分非绿色覆盖区;CIVE指数与WI指数计算结果图为二值图像,其中CIVE指数较好地提炼出了植被覆盖区域,WI指数图中白色为原图中浅色部分,黑色部分为原图中深色部分。但是,WI指数图中有一部分中间房屋建筑分为植被区(如图2)。
其中,图2的左图为研究区某一区域原始影像,右图为该区域WI指数掩模处理后的图像,黑色区域为WI指数计算的植被覆盖区。可以发现,两图线框中部分老式民居的黑色屋顶未识别出来。
对比图3与图1中的NGRDI指数图,发现RGBVI计算结果与NGRDI指数计算结果分布类似。但RGBVI计算公式中更综合地考虑了红绿蓝3个波段的影响,而NGRDI只是提到了红色波段的影响(见表1)。运用Otsu法计算阈值分割,实现了二值化处理(见图4),其中白色部分为植被覆盖区域,黑色部分为非植被覆盖区,本文将该方法称为RGBVI-Ostu方法。
2.2 结果分析
上述实验证明,CIVE指数计算结果与RGBVI-Ostu方法计算结果总体效果较好。针对以上两种结果进行像元统计分析,如表2所示。
利用合并后的第三次全国土地调查图斑范围,可将研究区分为3种类型:林地区、水田区、居住区(见图5)。
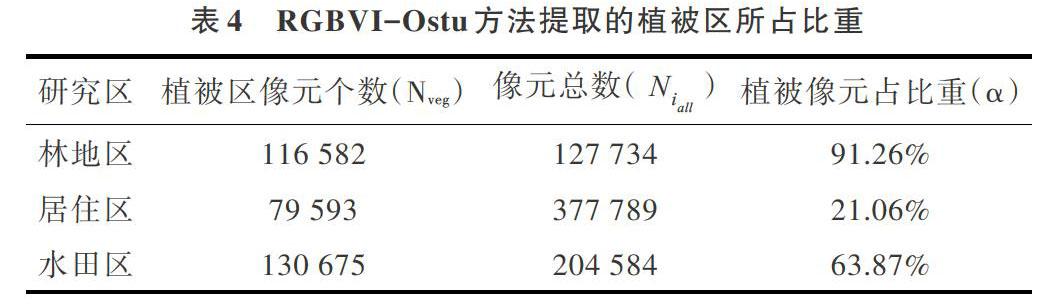
对于上述3个区域,利用植被像元总数比总像元数(见式1),分别求CIVE提取的植被区所占比重(见表3)与RGBVI-Ostu方法提取的植被区精度(见表4)。
其中,Nveg为植被区像元个数,[Niall]为各个区域像元总数,α为植被精度。
由表3、表4可知,RGBVI-Ostu方法提取的林地区域植被精度达91.26%,明显高于CIVE指数计算得到的林地区比例,说明在识别林地覆盖区方面,RGBVI-Ostu方法比CIVE方法提取植被覆盖区精度更高。
在居住区植被覆盖提取方面,RGBVI-Ostu方法提取的植被覆盖像元个数明显高于CIVE指数计算结果。进行RGBVI指数计算并用Ostu提取阈值掩模影像减去CIVE掩模影像(见图6),发现RGBVI-Ostu方法提取的庭院种植植被提取效果优于CIVE指数计算的提取效果。
在水田区植被覆盖提取方面,CIVE方法获得的植被像元比例仅比RGBVI-Ostu方法获得的植被像元比例提高2.34%,说明在水田区提取方面,两者差异相对于山林地区的24.15%与居住区的4.63%来说效果不显著。
由于试验区地处中国云南省,根据云南省的气候特点分析,11月份全省温度在10℃~20℃,植物生长情况较好。由于影像拍摄时间是在10月份,林地区绿色叶片的覆盖较为完整。又由于该时节水田里部分农作物长势良好,水田区域植被绿色叶片覆盖也相对完整,因此基于本文影像提取出来的植被区精确度不会受到季节影响,精度较高。
3 结语
综合以上分析,上述9种植被指数计算原理中只有RGBVI指数计算处植被指数对应亮度图像,而CIVE指数计算结果为有规律的二值图像。其它植被指数在第三次全国土地调查的计算应用上无结果,或计算得出的二值图像准确性较差。
CIVE指数计算方法与RGBVI-Ostu方法在植被覆盖提取效果上相比,在植被像元识别度总体上后者优于前者。因此,在可见光波段,RGBVI-Ostu方法在第三次全国土地调查底图植被覆盖区识别精确度较高。
根据表3和表4得出林地区植被覆盖比例高于水田区植被覆盖比例。這是由于一方面水田地区植物生长高度较低,为了方便农业生产管理便利,在农田区域往往会有一些房屋、沟渠、田间小路等配套设施;另一方面部分水田被闲置或收割后,无植被覆盖。这些因素均会影响水田区域植被覆盖情况。
由于第三次全国土地调查底图影像波段少,缺少用来表现植物特征的近红外波段,由于“异物同谱”的影响,用上述两种方法提取植被时容易把部分非植被的绿色物体归类为植被。因此,提取精度低于利用近红外波段的多光谱影像精度。
虽然RGBVI-Ostu方法对可见光波段植被覆盖区提取效果相对较好,但是对于基于第三次全国土地调查底图的无地类参照数据分类实验来说,RGBVI-Ostu方法并无可直接对植被类型进行有效提取的阈值。
随着无人机遥感技术的广泛应用、遥感影像技术及分类理论的发展,可见光波段植被指数应用前景将更广阔。随着机器学习在遥感图像分类领域的广泛使用,可见光植被指数(如RGBVI-Ostu方法提取的结果)可作为一个新的机器学习特征,进一步提高机器学习识别精度。
参考文献:
[1] 井然, 邓磊, 赵文吉,等. 基于可见光植被指数的面向对象湿地水生植被提取方法[J]. 应用生态学报, 2016, 27(5):1427-1436.
[2] JIU T Q. Advances in study on vegetation indices[J]. Advance in Earth Sciences, 1998(13):323-333.
[3] 黄洁, 唐守锋, 童敏明, 等. 计算机视觉技术在无人机上的应用[J]. 软件导刊, 2019, 18(1):20-22.
[4] TORRES-SáNCHEZ J, LóPEZ-GRANADOS F, ISABEL D C A , et al. Configuration and specifications of an unmanned aerial vehicle (UAV) for early site specific weed management[J]. PLoS ONE, 2013, 8(3):e58210.
[5] RASMUSSEN J,NIELSEN J,GARCIA-RUIZ F,et al. Potential uses of small unmanned aircraft systems (UAS) in weed research[J]. Weed Research, 2013, 53(4):242-248.
[6] DEMETRIOS G,LIENARD J F,ANDRE V,et al. 3D tree dimensionality assessment using photogrammetry and small unmanned aerial vehicles[J]. PLoS ONE, 2015, 10(9):e0137765.
[7] SUZUKI T,AMANO Y,TAKIGUCHI J I,et al. Development of low-cost and flexible vegetation monitoring system using small unmanned aerial vehicle[C].ICCAS-SICE. 2009:4808-4812.
[8] 毛智慧,邓磊,贺英,等. 利用色调—亮度彩色分量的可见光植被指数[J]. 中国图象图形学报, 2017, 22(11):1602-1610.
[9] 李长春,牛庆林,杨贵军. 基于无人机数码影像的大豆育种材料叶面积指数估测[J]. 农业机械学报, 2017, 48(8):147-158.
[10] GITELSON A A,KAUFMAN Y J,STARK R,et al. Novel algorithms for remote estimation of vegetation fraction[J]. Remote Sensing of Environment, 2002, 80(1):76-87.
[11] XUE J,SU B. Significant remote sensing vegetation indices: a review of developments and applications[J]. Journal of Sensors, 2017.
[12] WU Y,ZHAO L,JIANG H,et al. Image segmentation method for green crops using improved mean shift[J]. Transactions of the Chinese Society of Agricultural Engineering, 2014, 30(24):161-167.
[13] HAGUE T,TILLETT N D,WHEELER H. Automated crop and weed monitoring in widely spaced cereals[J]. Precision Agriculture, 2006, 7(1):21-32.
[14] SUN G,WANG X,YAN T,et al. Inversion method of flora growth parameters based on machine vision[J]. Transactions of the Chinese Society of Agricultural Engineering, 2014, 30(20):187-195.
[15] WOEBBECKE D M, MEYER G E, VON BARGEN K, et al. Color indices for weed identification under various soil, residue, and lighting conditions[J]. Transactions of the ASAE,1995,38(1):259-269.
[16] GUIJARRO M, PAJARES G, RIOMOROS I, et al. Automatic segmentation of relevant textures in agricultural images[J]. Computers and Electronics in Agriculture, 2011, 75(1): 75-83.
[17] GUERRERO J M,PAJARES G,MONTALVO M,et al. Support vector machines for crop/weeds identification in maize fields[J]. Expert Systems with Applications, 2012, 39(12):11149-11155.
(责任编辑:江 艳)
