1 ∶1 000地形图测绘技术分析
2020-07-26谢伟杰
谢伟杰
(汕头市潮南区规划测绘大队,广东 汕头 515144)
1 智能无人机测绘的存在意义
现代地形图测绘领域中,由于行业技术的不断发展,无人机航测遥感技术的应用范围正不断扩大,成为土地资源监测等工作中的重要技术手段,该技术具备效率高、成本低等特点,且在各类极端环境也具有适用性[1]。为适应多空间的测绘需求,近年来测绘工作中常采取卫星遥感等技术。从工作原理来看,卫星遥感的实现建立在人造卫星的基础上,实行的是远距离感测地面物的方式,并产生光谱效应,经过信息校正、转换等一系列流程后将生成数字化图形。实际应用效果表明,该技术易受到布点的限制且缺乏灵活性。作为全新的无人机测绘技术,则在很大程度上解决了上述问题,可通过低成本的方式完成地图测绘工作。由于该技术手段集成了数码照相技术、自动控制技术等领域的先进技术,因此,在技术自我适应的过程中也为现代化测绘工作提供了更有力的技术支持,生成的测绘图形品质得到大幅提高。
2 智能无人机测绘的工作流程
测绘前的准备工作要落实到位,应围绕测绘地区做好勘察工作,明确实际测绘范围以便给无人机的测量工作提供指导,确定合适的参数,如测量范围、相对高度等[2]。根据无人机的工作特点确定航空摄影流程,以此指导无人机完成拍摄作业,随后进行外业像控点的布设,航测内业描图并全面检查各步骤,将各项测绘工作落实到位[3]。整个测绘的核心在于智能无人机,作为关键的测绘设备可采集测绘范围内的数据,并及时传输至计算机软件中,在自动化分析技术的支持下完成核查与验证工作。
3 1∶1 000地形图测绘的实证分析
3.1 核心技术优化
1)外业作业时,应确定合适的像控点布设方案,主要考虑的是待测区的地类划分等因素,与该区域大小相适应。引入MAP-AT,利用该软件提供的DE工具实现对图像的自动拼接。同时兼顾地貌、地形等因素,为符合条件的像控点分别增设目标点,获得该点位周边的放大图,在此基础上执行打印、选刺与联测操作。
2)引入mapmatri平台,在其支持下达到无风自动切换模型的效果,最终实现立体测绘。
3.2 测区概况
根据智能测绘无人机的工作特点,为深入分析其在1 ∶1 000大比例地形图中所具备的应用效果,本文共选择了两种测绘环境,即平原与山区丘陵。为给测绘工作创造良好条件,勘察了现场环境,结果如下。
1)平原测区,所处位置为长江中下游,所在区域的气候特点为湿润多雨,年均日照1 700 h,区域内分布有堆积平原与滩涂平原,并建设有多类型道路工程及铁路。
2)山区丘陵测区,气候特点为干旱少雨,年均日照量较高,达到2 500 h,测区外部分布有大量山地,内部以丘陵居多,总体呈自东向西倾斜的特点,是发展水平较高的农业聚集区,路网系统由国道、县道等构成。
3.3 外业航摄与控制测量
选择的是GKGY型无人机双相机系统,其内置了佳能5D MarkⅡ相机,具备的持续巡航能力达到1.5 h,同时提供了弹射起飞等实用性功能,在多类测绘环境中都具有可行性。
分析测区最小外矩形,以该处四角坐标为准展开航线设计工作,以摄区走向为参考确定无人机的航线走向,综合考虑相机的焦距与像幅,经计算后确定航摄参数,如高度、基线长度,在此基础上进一步确定航线规模、长度等,作为正式航摄的基本指导。
若因最小地面分辨率明显偏低而无法满足成图要求时,要求更改地面分辨率,由于此参数的变化,相对航高也要随之调整。利用GPS静态测量的方式布设控制网点,总量为17个,随后实测闭合环线与三角高程网。像片控制点刺点选择的是电子刺点,针对各自的情况使用电子文档做出明确的说明;关于外业实测选择的是GPS-RTK的方法。
3.4 立体测图与调绘补测
内业空三加密选择的是MAP-AT系统,数字线划图(DLG)立体测图选择的是Map Mtrix。关于立体测图遵循的是“所见即所得”的基本原则,以空三加密成果为基准,在此基础上恢复立体模型,达到全要素采集的效果。检验立体模型,若分布有大范围的阴影或是其他异常情况,需使用邻近模型补救。线、面桩要素采集点的设置要确保密度足够合理,以要素几何形状不失真为基本前提,伴随曲率的不断提升,生成的曲线不可出现大幅度的变形现象,亦不可存在明显的折线,平直的区域允许在既有基础上加大采点间距。线状要素若被其他类型的符号所隔断(较典型的有水系遇桥梁),采取不间断连续采集的方式。应注意的是公共边不可出现重复采集现象。地物测绘工作中引入的是立体判读法,生成具备连续性、足够光滑的等高线,此资料可用于反映地貌特点。若测绘时遇到密灌覆盖区遵循的是缩小看、放大画的原则,最终完成测绘工作。
经业内采集作业后获得划线图套合影图像,将其用于外业协调与补测。根据无人机测绘的特点,其存在航片像幅小的问题,同时摄区内高差极为明显,从现场情况来看房屋主要为宽屋檐结构形式,涉及到大量的投影差和屋檐宽度改正作业,明显加大了外业工作量。
1)低于纠正起始面的物体,投影差值大于图上0.2 mm时,此情况下需采取投影差纠正措施。
2)以墙基为准,为之生成房屋轮廓线,结合屋檐宽度,若该值大于图上0.2 mm必须进行屋檐宽度改正。当结束内业测图相关工作后,综合外业调绘与补测可以生成正射影像图,即DOM,见图1。

图1 测区DOM
3.5 精度分析
经上述测绘流程后获得成果,采取GPS-RTK与全站仪相综合的方式(要求两类装置精度保持一致),完成对成果的检查。关于检查点的设置主要集中在电杆、房角等区域,遵循分布广、数量多的原则,确保各检查点具有代表性。根据本次测绘情况,检查平面点总量为216个,中误差0.68 mm,最大误差2.7 mm。具体来说,未超过1倍中误差的点数最多,共计159个,为整体的74%;介于1倍中误差与2倍中误差之间的点数共计48个,为整体的22%;除此之外,还分布有超2倍中误差的点,此部分仅为9个。根据所得结果绘制误差分布区间图,具体见图2。
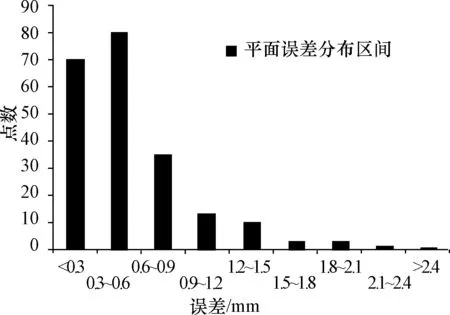
图2 平面误差分布区间
设置检查高程点,总量为132个,总结分析后得知,中误差为0.84 mm,最大误差2.4 mm。具体来说,未超过1倍中误差的点数最多,共计132个,为整体的73%;介于1倍中误差与2倍中误差之间的点数共计40个,为整体的22%;除此之外还分布有超2倍中误差的点,此部分仅为10个。根据所得结果绘制误差分布区间图,具体见图3。
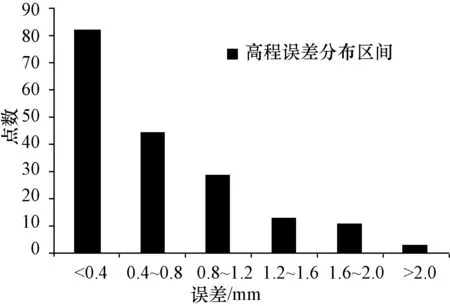
图3 高程误差分布区间
综合上述检测结果,得知无论是平面还是高程的精度都较为良好,与1 ∶1 000测绘图的成图要求相符,表明本文所提出的测绘技术具有可行性。
4 结束语
智能测绘无人机是现代测绘领域的主要设备,可弥补传统的卫星遥感等技术的缺陷,由于搭载了高像素数码相机,因此,在要求较高的1∶1 000地图测绘工作中具有可行性。从实际结果来看,本文所选择的机型工作能力较强,可生成准确的测绘地形图,加之Map Matrix等软件的辅助,在提升测绘精度的同时有效解决了人工投入量较大的问题,值得被推广运用。
[ID:009909]
