基于LBS云平台的微信小程序二维码区域定位系统设计
2020-07-23陆霞
陆霞
摘 要: 针对传统定位系统存在定位耗时长以及定位准确度差的问题,提出并设计基于LBS云平台的微信小程序二维码区域定位系统。系统整体架构分为LBS云服务、中心数据处理和小程序二维码定位端三部分。从服务器端模块、处理器以及定位模块入手设计硬件,为系统构建提供基础。软件设计中,采集微信小程序二维码区域图像,对图像边缘特征进行增强与滤波处理,依据处理后的图像边缘特征确定定位目标,完成微信小程序二维码区域定位系统设计。实验结果表明,该系统的定位耗时相当于传统系统的50%,定位准确率始终保持在99.5%以上,具有显著优势。
关键词: 二维码区域; 定位系统; LBS云平台; 图像采集; 边缘特征处理; 仿真实验
中图分类号: TN967?34; TP391.44 文献标识码: A 文章编号: 1004?373X(2020)04?0180?03
Design of WeChat mini program two?dimensional code region positioning system
based on LBS cloud platform
LU Xia
(School of Information and Engineering, Nanjing Normal University Taizhou College, Taizhou 225300, China)
Abstract: In allusion to the problems of long time?consumption positioning and poor positioning accuracy in the traditional positioning system, a two?dimensional code area positioning system based on micro?message small program on LBS cloud platform is proposed and designed. The overall architecture of the system is constructed, which is divided into three parts: LBS cloud service, central data processing and two?dimensional code positioning terminal of small program. The hardware is designed from three modules: server module, processor module and positioning module, which provides the basis for the system construction. In the software design, the images of two?dimensional code area of the WeChat applet are collected. The image edge features are performed the enhancement and filtering processing, after which the location object is determined to complete the design of the two?dimensional code area location system of the WeChat applet. The experimental results show that the positioning time?consuming of the system is about 50% of the traditional system, and the positioning accuracy is always above 99.5%, which has significant advantages.
Keywords: two?dimensional code; positioning system; LBS cloud platform; image capture; edge feature processing; simulation experiment
0 引 言
微信小程序是由腾讯公司推出的一款用户与服务相互连接的新的方式,它可以在微信内被快速、便捷的获取,用户不需要下载和安装任何APP,就可以获取需要的服务,且微信小程序功能丰富,具有出色的用户体验[1?3]。其中的二维码技术可满足用户对信息量不断增加的需求,因而在各领域中得到广泛的应用,在二维码识别过程中,主要使用的是二维码区域的定位技术。目前,LBS云平台(基于位置的服务)等多种平台经常被用于信息定位,并取得了一些较好的研究成果。
文献[4]提出结合BP神经网络的二维码条码区定位方法,通过图像预处理得到二维码的区域块,并过滤得出正确的二维码图像,进而定位得出二维码信息。该方法提高了定位效率,但定位耗时较长。文献[5]通过对位置判断的方法,完成对二维码的定位研究,首先利用双边滤波去除图像噪声,然后通过轮廓检测进行二维码区域的粗定位,最后利用位置判别算法对细化图像骨架,完成二维码的定位,但定位过程中消耗流量过多。文献[6]在未知环境下,利用单目视觉测距对移动机器人定位进行研究,给出二维码世界坐标,得出基于二维码的机器人绝对坐标值,避免了编码器短距离定位存在的误差,该方法的定位成功率较高,但存在定位耗时长的问题。
针对上述研究存在的问题,提出并设计一种基于LBS云平台的微信小程序二维码区域定位系统。实验验证结果表明,该系统定位耗时短,且定位准确度高,性能较好。
1 微信小程序二维码区域定位系统设计
1.1 系统整体架构
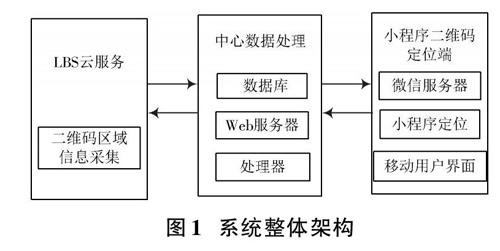
基于LBS云平台的微信小程序二维码区域定位系统整体架构如图1所示。
根据图1可以看出,系统主要由LBS云服务、中心数据处理和小程序二维码定位端三部分组成。在LBS云服务过程中设置位置传感器,对二维码区域信息进行采集。中心数据处理部分则主要由数据库、Web服务器和处理器协同运行,数据库负责对系统数据进行处理,Web服务器负责接收LBS云服务信息,对发送信息至客户端,处理器则负责对数据信息的处理。小程序二维码定位端部分,由微信服务器接收系统数据,进而对二维码区域进行精准定位,则可以获取小程序发布的信息,显示在移动用户界面。
1.2 系统硬件设计
1.2.1 服务器端模块
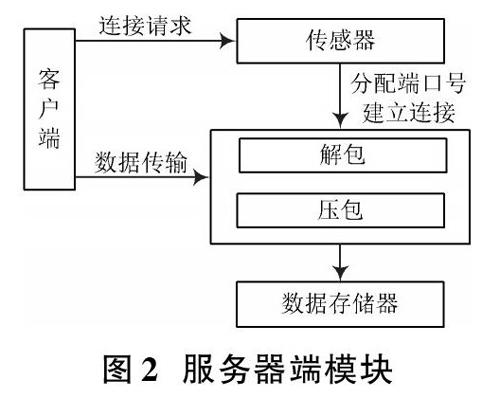
服务器端模块主要包括传感器和数据存储器,以及信息压包、解包模块等,其流程图如图2所示。
当收到客户发送请求时,进行二维码区域定位,服务器是其中需要重点使用的工具。服务器架设在网络上,通过指定IP地址及端口号与外界进行连接。利用传感器对二维码区域信息进行采集[7?8],由于格式适用以及数据量的问题,服务器给出标准的数据格式,对采集得到的数据进行压包和解包处理,并将最终数据传输至数据存储器,为二维码区域定位奠定基础。
1.2.2 处理器
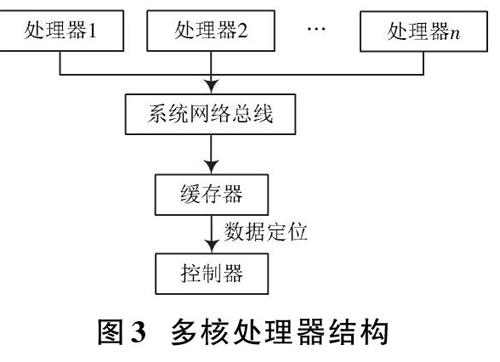
采用多核处理器对系统数据进行处理,多核处理器通常是指芯片级多处理器。在单个集成电路中,利用多核处理器可实现多个芯片单元构建,且各芯片单元间可信息共享[9]。多核处理器结构如图3所示。
图3中,多核处理器通过系统网络总线与缓存器相连接,对缓存区二维码区域定位待使用数据进行控制。各处理器对数据的访问方式与访问时间相同,多个核心处理器对数据进行并行处理,以提高系统数据处理效率。
1.2.3 定位模块
定位模块主要负责完成二维码区域定位,首先建立二维码区域坐标图,然后当服务器运行时,导入二维码区域坐标信息数据,同时调用该区域对应的属性数据库,利用定位器获取二维码区域的准确信息,完成区域信息定位[10]。
1.3 系统软件设计
对微信小程序二维码区域定位过程中,首先对二维码区域边缘图像进行采集,增强图像边缘特征,并作出滤波处理,进而根据二维码图像的边缘特征来确定定位目标区域。
设原始二维码区域图像边缘特征为[E],则有:
[E=meanLX+stdLX] (1)
式中:[meanLX]为矩阵元素均值;[stdLX]为矩阵元素标准差。
假设图像的信号方差值为[σ2i,j],则含噪二维码区域图像实行维纳滤波后,获取的增强结果可表示为:
[Si,j=Eσ2i,jσ2i,j+Ni,jyi,j] (2)
式中:[Si,j]代表增强后图像;[yi,j]代表含噪图像在小波分解下产生的小波系数。
根据上述滤波处理后的图像,可得到二维码定位目标区域,表示为:
[Wi,j=Si,j1+β] (3)
式中:[Wi,j]表示二维码定位目标区域;[β]代表图像定位系数。
依据上述二维码目标区域定位计算过程,可完成微信小程序二维码区域定位。
2 实验结果与分析
2.1 实验环境
为充分验证本文系统的性能,进行了仿真实验分析。使用100张像素大小为720×480的二维码图像进行测试,系统使用的后台服务器型号是Dell PowerEdge R720,配有32核64 GB内存的Intel[?] Xeon[?]处理器,服务器的操作系统是Windows 10,系统以Microsoft SQL Server 2008为后台数据库。以上述实验环境和参数设置为依据,对本文系统与传统系统进行对比,性能指标分别为:定位耗时与定位准确度。
2.2 定位耗时对比
为验证本文系统的优越性能,对本文系统与文献[5]系统的定位耗时进行对比,结果如图4所示。
根据图4可知,本文系统与文献[5]系统的定位耗时走势基本一致,均随着数据记录时间的推移逐渐增加,但本文系统始终低于文献[5]系统,且存在较大的差异。在10 min的数据记录时间之内,本文系统的平均定位耗时约为3 min,文献[5]系统的平均定位耗时约为6 min,相当于本文系统的2倍,验证了本文系统的优越性。这是因为在系统硬件设计过程中,采用多个核心处理器对数据进行并行处理,以此提高系统数据处理效率,进而节省定位耗时。
2.3 定位准确度对比
本文设计的系统是为了实现微信小程序二维码区域的精准定位。对比本文系统与文献[6]系统对微信小程序二维码区域的定位准确程度结果验证本文方法的定位准确性。为了使实验更加精准,设置系统运行时间为10 min,在相同的条件下对比本文系统与文献[6]系统的定位准确性,实验结果图5所示。
分析图5可知,随着系统运行时间的不断增加,本文系统定位准确度始终保持在99.5%以上,说明本文方法的定位准确度较高。文献[6]系统的定位准确度较为不稳定,有较大幅度的波动,均未达到99.5%,最高达到99.25%。从以上对比数据中可以看出,本文系统具有较高的定位准确度。
3 结 论
在微信小程序使用过程中,二维码区域定位技术得到广泛的使用,为用户带来极大的方便。本文提出并设计了一种基于LBS云平台的微信小程序二维码区域定位系统,从硬件和软件两个方面做出了具体描述,设计完成微信小程序二维码区域定位系统。实验结果表明,该系统能够快速完成对二维码区域的准确定位,具有良好的应用性能。
参考文献
[1] 庄莹,黄丽娜,郑恒杰,等.二维码定位技术支持下的室内导航电子地图的设计与实现:以武汉大学图书馆为例[J].测绘通报,2017,33(5):125?128.
[2] 夏凌云,龚文涛.基于微信公众平台和iBeacon的智慧校园LBS应用设计[J].微型电脑应用,2016,32(12):50?53.
[3] 査金超,王直杰.基于GPS及LBS的移動终端定位研究[J].电子测试,2016,45(17):86?87.
[4] 蓝杰,张浩然.基于BP神经网络二维码区域提取[J].微型机与应用,2015,34(1):50?52.
[5] 高飞,令狐乾锦,葛一粟,等.基于位置判别的激光QR二维码定位方法[J].计算机辅助设计与图形学学报,2017,29(6):1060?1067.
[6] 罗高,袁亮.基于二维码的单目视觉测距移动机器人定位研究[J].组合机床与自动化加工技术,2017,41(10):114?117.
[7] 陈晓红,钱晨,洪文昕,等.基于二维码的可见光室内定位方法及实现[J].电子科技,2017,16(12):34?38.
[8] 李长勇,房爱青,袁亮,等.家庭服务机器人定位系统研究[J].机械设计与制造,2017,39(7):248?251.
[9] 朱玉强.微信小程序在图书馆移动服务中的应用实践—以排架游戏为例[J].图书馆论坛,2017,37(7):132?138.
[10] 杨亚洲,汤建清,王俊.基于微信小程序与二维码技术对中药饮片精准识别教学工具的研发[J].药学教育,2017,33(5):73?76.
