组合滤波EOH?SIFT特征和模糊推理实现的掌纹识别
2020-07-23陶筱娇卢锦
陶筱娇 卢锦
摘 要: 为了提高掌纹图像对于位置、方向和亮度变化的鲁棒性,提出一种结合滤波技术实现掌纹识别的算法。首先,按特定顺序过滤过滤器,然后提取掌纹图像的EOH?SIFT特征并创建类别数据库。将要识别的掌纹图像的关键点与类别数据库中的所有关键点之间的模糊匹配度的最大值用作该点的模糊隶属度,由模糊推理规则完成掌纹识别。实验结果表明,所提算法提高了EOH?SIFT特征识别掌纹的有效性,并且对掌纹图像的位置、方向、亮度变化和噪声具有较高的鲁棒性。
关键词: 掌纹识别; 模糊推理; EOH?SIFT; 滤波处理; 关键点匹配; 实验结果分析
中图分类号: TN713?34 文献标识码: A 文章编号: 1004?373X(2020)04?0073?05
Palmprint recognition based on integrated filtering EOH?SIFT
features and fuzzy reasoning
TAO Xiaojiao, LU Jin
(College of Electrical & Information Engineering, Shaanxi University of Science & Technology, Xian 710021, China)
Abstract: An algorithm combined with the filtering technique to realize the palmprint recognition is proposed to improve the robustness of palmprint image to the change of position, direction and brightness. The filters are filtered in a specific order, and then the EOH?SIFT features of palmprint images are extracted to build the classification database. The maximum value of the fuzzy matching degree between the key points of the palmprint image under recognition and all key points in the classification database is used as the fuzzy membership of the point, and the palmprint recognition is completed with the fuzzy inference rules. The experimental results demonstrate that the proposed algorithm can improve the effectiveness of the palmprint recognition according to the EOH?SIFT features, and has the robustness of palmprint image to the change of position, direction and brightness as well as noise.
Keywords: palmprint recognition; fuzzy reasoning; EOH?SIFT; filtering processing; key point matching; experimental result analysis
0 引 言
掌纹识别是一种近年来引起广泛關注的利用多种数字图像处理和模式识别技术的身份识别系统[1]。其他生物特征相比,掌纹具有丰富的线条、细节和外观特征,可分性强,而且易定位、不易失真。因此,掌纹识别是个人认证的有效且可靠的生物特征。在过去的15年中,已经开发了许多掌纹识别技术。目前,较为成熟的掌纹识别方法主要包括基于结构的方法、基于子空间的方法和基于纹理的方法。掌纹识别按不同的应用场景分为离线和在线系统[1]。离线系统对图像质量要求较高,掌纹识别主要侧重于基于特征的特征提取和匹配,因此该系统适用于刑事侦查等专业应用场景。然而,高分辨率图像很大,预处理过程相对复杂,处理时间长。而在线系统针对低分辨率掌纹图像,因此特征空间小,不易受噪声干扰。
基于结构的掌纹识别算法[2]是先提取掌纹特征,再将特征进行匹配来实现掌纹识别的。它包括基于空间域的边缘检测方法、基于方向投影的方法和基于堆栈过滤的方法。基于结构的算法是由掌纹特征进行匹配完成识别的,所以对高分辨率图像具有良好的分类效果。然而,由于在线系统中常用的低质量掌纹图像,难以准确地获得掌纹的线条特征。因此,该方法仅适用于离线掌纹识别系统。
基于子空间分解的掌纹识别算法[3]主要通过投影或变换将掌纹图像转换为低维矩阵,并在低维空间中进行匹配。目前比较常用的子空间分解方法有 PCA,ICA,LDA等,此类方法都是将子空间分解系数作为掌纹特征进行匹配来实现掌纹识别,且都可以应用于在线和离线识别系统。但是基于子空间分解的方法对掌纹图像的位置、方向、亮度变化不敏感,很难获得精度较高的分类结果。
基于图像纹理分析的掌纹识别算法的识别精度一般高于基于子空间分解算法,常见的掌纹识别算法有傅里叶变换,离散余弦变换,基于小波变换的算法等。Gabor小波变换的掌纹识别方法对光照变化不敏感,时频定位准确,具有良好的识别性能,适用于在线和离线掌纹识别系统。然而,由于噪声干扰以及图像采集期间出现的位置变化的干扰,图像对方向的变化十分敏感。在采集掌纹时虽然能够固定采集器的手掌的位置,但难以精确地定位和定向,采集到的掌纹图像的位置和取向将在不同程度上变化。因此,在 Gabor小波域中引入复杂的编码过程[4]来提高掌纹图像的方向和光照变化的鲁棒性。但是由于复杂的编码过程,算法的计算效率显着降低。
SIFT是一种提取图像不变特征的算法[5]。通过该方法提取的特征对图像的尺度、位置、方向,光照和视角的微小变化具有良好的稳定性。目前SIFT算法广泛应用于图像区域匹配,目标识别和纹理分类,并具有良好的性能。本文中掌纹图像先由组合滤波器预处理,提高了EOH?SIFT算法的准确性。训练过程时,提取属于相同类型训练样本的EOH?SIFT描述符以进行匹配。然后计算相互频率超过1/2的关键点的匹配率,和关键点对应于样本图像和EOH?SIFT描述符的坐标的均值和方差,组成类别数据库。然后,计算每个类别的每个关键点与要识别的掌纹图像的所有关键点之间的最大模糊匹配度,作为关键点的模糊隶属度。最后,通过建立的模糊推理规则完成识别过程。实验验证了本文算法的有效性。
1 EOH?SIFT特征
1.1 SIFT特征
尺度不变特征变换(Scale Invariant Feature Transform,SIFT)算法是当今图像处理中使用最广泛的算法。改变原始图像尺度可以获得表示多个尺度图像的尺度空间序列,并从序列中提取尺度空间的主轮廓。主轮廓用作特征向量来提取特征并检测不同分辨率的角点。图像的尺度空间可以定义为:
[Lx,y,σ=Gx,y,σ*Ix,y] (1)
式中:[Ix,y]是原始图像;[Gx,y,σ]是高斯函数;[σ]表示空间的大小,[σ]越大表明越模糊,[σ]越小表示越清晰。高斯函数[Gx,y,σ]为:
[Gx,y,σ=12πσ2e-(x2+y2)/(2σ2)] (2)
SIFT算法中使用DOG函数[Dx,y,σ]来找到极值点,定义为:
[Dx,y,σ=Lx,y,kσ-Lx,y,σ] (3)
DOG对噪声和边缘很敏感,因此,需拟合DOG空间以找到极值点的位置和比例。由于图像中物体边缘位置点的主曲率一般较高,因此由主曲率判断该点是否位于物体的边缘位置,公式如下:
[mx,y=Lx+1,y-Lx-1,y2+Lx,y+1-Lx,(y-12] (4)
[θx,y=atan2·Lx,y+1- Lx,y-1,Lx+1,y-Lx-1,y] (5)
式中:m(x,y)是梯度幅值;[θx,y]是方向。
1.2 EOH?SIFT特征提取
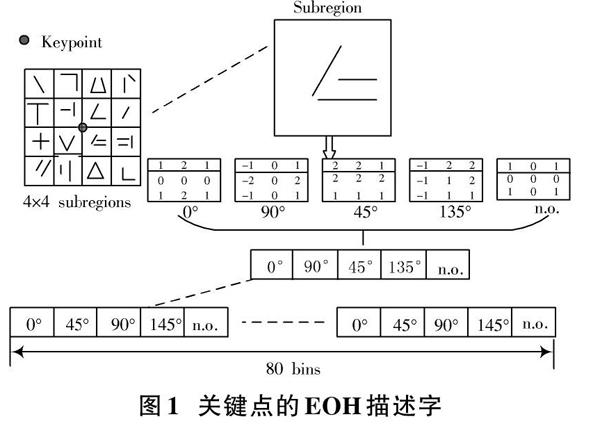
边缘方向直方图(EOH)[6]特征根据Sobel算子获得的梯度信息。它直观地将每个关键点分配到同一个方向。为了提高其准确性, Cristhian Aguilera等人提出了结合 SIFT和 EOH特征的算法,通过使用各种滤波器来提高输入图像的质量,并应用于感兴趣的领域,最终获得更准确的结果[7]。因此,通过预处理和滤波,可以提高EOH?SIFT组合的精度。EOH?SIFT描述字是由图像强度之间的非线性关系激发的,因此该描述字主要基于区域信息而不是像素信息。下面详细描述了获取关键点描述字的步骤。首先,在给定的SIFT关键点处得到一个N×N像素区域;然后,将该区域分成4×4=16个子区域;最后,这些子区域中的每一个区域按照MPEG?7标准[8]计算的轮廓直方图来表示。该直方图表示4个方向边缘和1个非方向边缘的空间分布,分别對应于0°,45°,90°和135°的轮廓方向以及不包含轮廓的区域,如图1所示。计算16个子区域得到共80维的向量(16×5=80)。这个向量归一化后作为每个关键点的描述字向量。
2 滤 波
噪声是图像采集过程中误差的结果,这些误差导致像素值不能反映真实场景的真实强度。图像不同的产生方式会引入不同的噪声。如果直接以数字格式获取图像,用于收集数据的设备(例如CCD检测器)可能引入噪声。图像数据的电子传输也可以引入噪声。所以,需要对图像进行预处理。滤波有两个要求:一是不损坏图像轮廓和边缘等重要信息;二是使图像视觉效果清晰。
2.1 中值滤波
中值滤波器[9]对像素附近的像素的灰度值进行排序,并用排序的中值替换像素的值。诸如单极或双极脉冲噪声的随机噪声,中值滤波具有更好的去噪效果,具有更少的模糊性,能够保护图像边缘不被模糊。
2.2 双边滤波
双边滤波[10]同其他滤波器一样,利用加权平均法,周围像素亮度值加权平均值代表像素强度,加权平均值基于高斯分布像素范围内的辐射差异[11](例如卷积核中像素与中心像素的相似性、颜色强度、深度距离等)。在计算中心像素时考虑了这两个权重。如下:
[bfIp=1Wpq∈NpGσsp-qGσrIp-IqIq] (6)
[Wp=q∈NpGσsp-qGσrIp-Iq] (7)
通过邻域N(p)中的所有像素点[q∈N(p)]加权求和来获得像素p的值,并且权重系数是[Wpq]。
[Wpq=Gσsp-qGσrIp-Iq] (8)
对于高斯函数[Gσ],均值为0,标准差为[σ],域核为[Gσs],值域核为[Gσr]。
[Gσsp-q=exp-px-qx2+py-qy22σ2s] (9)
式中:[px],[py],[qx],[qy]表示图像中像素p和q的位置坐标;[Gσs]表示当前滤波后的输出值与像素的位置距离有关,p点越近,对p输出滤波的影响越大。
[Gσrp-q=exp-Ip-Iq22σ2r] (10)
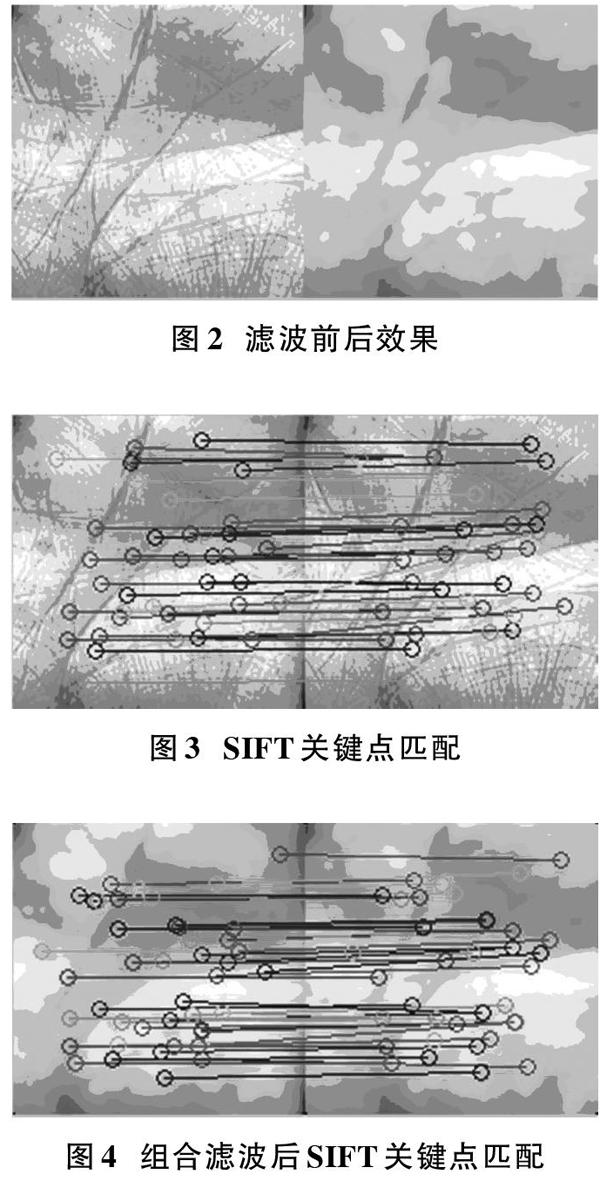
式中,像素点p,q的亮度值为[Ip,Iq],亮度值越大,对p的滤波输出的影响越大。双边滤波器对掌纹图像的滤波效果如图2所示。实验表明,用中值滤波和双边平滑滤波器预处理后的图像进行EOH?SIFT特征提取能够得到较高的分类精度。图3、图4为SIFT和滤波后SIFT关键点匹配。
3 模糊推理规则
本文提出的算法在训练过程中,提取属于相同类训练样本的EOH?SIFT描述符以进行匹配。然后计算匹配频率超过[12]的样本的每个关键点的匹配率,对于属于 w类的第i个关键点[ki,w],其匹配率[pi,w]定义为:
[pi,w=ni,wNw] (11)
式中:[Nw]是这类训练样本的总数;[ni,w]是在训练样本中的匹配次数。同时,计算相应样本图像中关键点的位置坐标[(xj,yj)]的均值[xi,w],[yi,w]与方差[σx2i,w],[σy2i,w],有:
[xi,w=j=1ni,wxjni,w] (12)
[yi,w=j=1ni,wyjni,w] (13)
[σx2i,w=j=1ni,w(xj-xi,w)2ni,w] (14)
[σy2i,w=j=1ni,w(yj-yi,w)2ni,w] (15)
计算这些关键点的EOH?SIFT描述字[suj]的平均值[sui,w],描述字[suj]与均值[sui,w]的最大欧氏距离为[mdi,w]。
[sui,w=j=1ni,jsujni,w] (16)
将这些关键点的匹配率[pi,w]、位置坐标的均值[xi,w],[yi,w]与方差[σx2i,w],[σy2i,w]和EOH?SIFT描述字的均值[sui,w]与最大欧氏距离[mdi,w]相结合以建立类别数据库。
在识别过程中,给定待识别掌纹图像[fx,y],基于SIFT算法提取关键点,并确定关键点的EOH?SIFT描述符[sufk]及其位置坐标[xk,yk],其中[1≤k≤M],[M]为掌纹图像[fx,y]中提取的关键点的总数。然后,计算类别数据库中每个类别的每个关键点与待识别掌纹图像所有关键点模糊匹配度的最大值作为该关键点的模糊隶属度,定义为:
[μi,w=maxexp-(xk-xi,w)22σx2i,w×exp(-(yk-yi,w)22σy2i,w× exp-dsufk,sui,w22md2i,w] (17)
式中,[d·]表示兩个向量的欧氏距离。然后计算[μi,w]的加权和作为图像[fx,y]属于该类别的模糊隶属度[μw],有:
[μw=iμi,w·pi,w] (18)
式中,[pi,w]为归一化匹配率,定义为:
[pi,w=pi,wipi,w] (19)
计算该类别的关键点匹配率[pi,w]的均值[pw]:
[pw=ipi,wni,w] (20)
本文构造了一个模糊推理规则来减少SIFT关键点误匹配对掌纹分类效果的影响,具体规则如下:
IF [μw]的最大值[μw1]与其次大值[μw2]的差值大于阈值T,THEN [fx,y∈w1]
ELSE IF [pw1 ELSE按顺序删除[w2]类中最小的[pi,w]对应的关键点,直到[pw2]第一次超过[pw1],利用式(18)重新计算[μw1] IF [μw1≥μw2] THEN [fx,y∈w1] ELSE [fx,y∈w2] 4 实验结果和对比分析 本文使用某大学的掌纹公开库(V2)[12]。该数据库分两批收集。因此,第二批采集的图像相对于第一批采集图像的光照条件、图像位置和方向不同程度上发生了变化。 实验1:本实验的目的是测试算法的精度。在标准掌纹数据库中选择第一批每人的9个掌纹图像以形成训练集。然后将本文方法、HOL[13]、E?BOCV[14]、DRCC[15]、基于Log?Gabor[16]的方法、基于Contourlet变换[17]的方法进行比较。由于掌纹获取装置具有限制用户手掌的位置和方向的功能[1],所以收集的掌纹图像的位置和方向的偏差较小。这在实验中也得到了证实。类似掌纹图像的正确匹配关键点大多在围绕坐标平均值的方差的3倍之内。在仿真算法中,仅计算满足条件的关键点的模糊隶属度。分类比较结果见表1。从表1中可以看出本文方法具有最佳分类效果。 实验2:为了模拟复杂图像中噪声干扰的情况,在掌纹数据库第一批次的原始图像加入了均值为0,方差为15的高斯噪声原始掌纹图像和加入噪声后的掌纹图像如图5所示。实验分类结果见表2。从表2中可以看出,所提出的方法具有很强的鲁棒性。 实验3:此实验的目的是验证本文方法对照明、位置和方向变化的稳健性。第一批掌纹图像用作训练集,第二批掌纹构成测试集。 加噪后不同算法的正确分类率从表3中可以看出,本文所提出的方法更加稳健。 5 结 论 本文提出一种新的掌纹识别方法,该方法可有效消除噪声,对掌纹图像的旋转、缩放和亮度变化具有鲁棒性。实验结果表明,两种滤波器按特定顺序进行预处理可显著提高EOH?SIFT方法识别掌纹的有效性,具有比其他方法更高的识别率。 参考文献 [1] JAIN A K, NANDAKUMAR K, ROSS A. 50 years of biometric research: accomplishments, challenges, and opportunities [J]. Pattern recognition letters, 2016(79): 80?105. [2] FEI L, XU Y, ZHANG B, et al. Low?rank representation integrated with principal line distance for contactless palmprint recognition [J]. Neurocomputing, 2016, 218(19): 264?275. [3] HEMANTHA K K, MUNAGA V N K P. Palmprint identification using gabor and wide principal line features [J]. Procedia computer science, 2016(93): 706?712. [4] YOUNESI A, AMIRANI M C. Gabor filter and texture based features for palmprint recognition [J]. Procedia computer science, 2017, 108: 2488?2495. [5] LOWE D G. Distinctive image features from scale? invariant keypoints [J]. International journal of computer vision, 2004, 60(2): 91?110. [6] LEVI K, WEISS Y. Learning object detection from a small number of examples: the importance of good features [C]// Proceedings of 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. DC: IEEE, 2004: 53?60. [7] AGUILERA Cristhian, BARRERA Fernando, LUMBRERAS Felipe, et al. Multispectral image feature points [J]. Sensors, 12(12): 12661?12672. [8] SIKORA T. The MPEG?7 visual standard for content description?an overview [J]. IEEE transactions on circuits and systems for video technology, 2001, 11(6): 696?702. [9] WANG J H, LIN L D. Improved median filter using minmax algorithm for image processing [J]. Electronics letters, 1997, 33(16): 1362?1363. [10] SONALI D, RANJAN S M, RANJAN J U. K?NN based automated reasoning using bilateral filter based texture descriptor for computing texture classification [J]. Egyptian informatics journal, 2018, 19(2): 133?144. [11] 刘永财,鲍益东,王小平,等.结合全变分的双边滤波图像去噪方法研究[J].现代电子技术,2017,40(17):36?39. [12] ZHANG D, WAI?KIN K, YOU J, et al. Online palmprint identification [J]. IEEE transactions on pattern analysis & machine intelligence, 2003, 25(9): 1048?1050. [13] JIA W, HU R X, LEI Y K, et al. Histogram of oriented lines for palmprint recognition [J]. IEEE transactions on systems, man, and cybernetics: systems, 2014, 44(3): 385?395. [14] ZHANG L, LI H, NIU J. Fragile bits in palmprint recognition [J]. IEEE signal processing letters, 2012, 19(10): 663?666. [15] XU Y, FEI L, WEN J, et al. discriminative and robust competitive code for palmprint recognition [J]. IEEE transactions on systems, man, and cybernetics: systems, 2016: 1?10. [16] MALVIYA R, KUMAR R, DANGI A, et al. Verification of palm print using Log Gabor filter and comparison with ICA [J]. International journal of computer applications in engineering sciences, 2011(17): 214?218. [17] ARDABILI E, MAGHOOLI E, FATEMIZADEH E. Contourlet features extraction and AdaBoost classification for palmprint verification [J]. Journal of American science, 2011, 7(7): 353?362.
