基于线性自抗扰理论的三维吊车控制
2020-07-22邓微


摘要:针对吊车控制系统非线性、强耦合,欠驱动等特点。本文设计了线性自抗扰控制器解决这一问题。对比LQR控制效果,仿真和实验结果表明本文所设计线性自抗扰控制具有较好的鲁棒性、稳定性和较强的实时性。
关键词:吊车;线性自抗扰控制;鲁棒性;LQR控制
中图分类号:TP391 文献标识码:A 文章编号:1007-9416(2020)06-0000-00
桥式吊车作为一种大型的现代搬运工具,在建筑工程中广泛使用。本文根据吊车摆动过程中存在控制时间长,摆角幅度大等问题。由于非线性自抗扰控制器[1]存在整定参数多,调参相对复杂,故使用线性自抗扰控制器,不仅控制效果佳且应用广泛。
1 吊车试验平台数学模型
选择某公司三维桥式吊车模型作为实验对象。通过分析可得到系统的状态方程。选择x轴方向作为研究且其变量完全解耦,设,作为控制输入,则状态方程为:
上式1中为负载的质量,Mx为小车及导轨(沿x方向)质量,吊绳与z轴、xz平面的夹角,L为摆绳长度,为沿x方向的拉力,为沿x方向的摩擦力系数。
2设计线性自抗扰控制器
为了实现小车位置与摆角的参数整定,参照文献[2]设计了线性自抗扰控制器,设二阶被控对象的状态方程为:
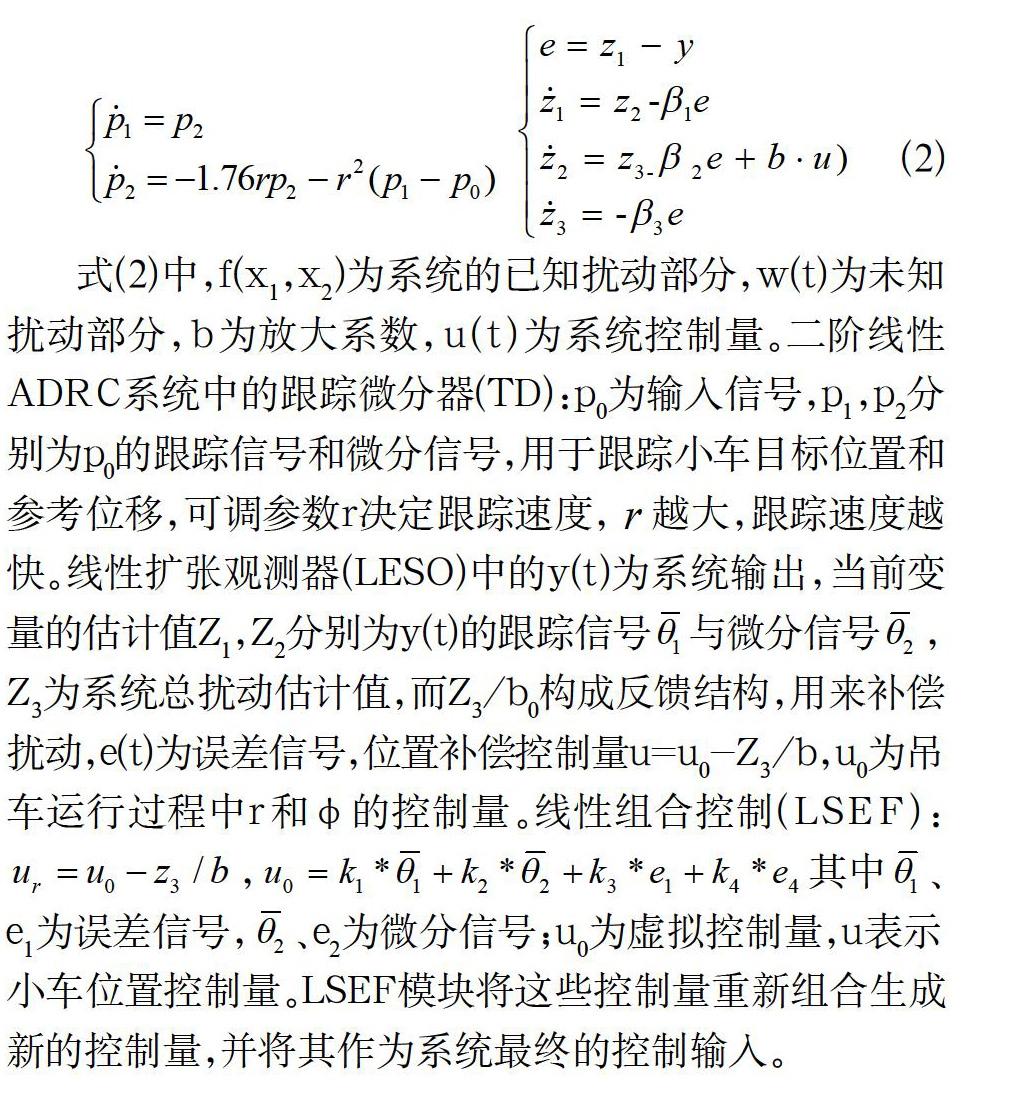
式(2)中,f(x1,x2)为系统的已知扰动部分,w(t)为未知扰动部分,b为放大系数,u(t)为系统控制量。二阶线性ADRC系统中的跟蹤微分器(TD):p0为输入信号,p1,p2分别为p0的跟踪信号和微分信号,用于跟踪小车目标位置和参考位移,可调参数r决定跟踪速度,越大,跟踪速度越快。线性扩张观测器(LESO)中的y(t)为系统输出,当前变量的估计值Z1,
Z2分别为y(t)的跟踪信号与微分信号,Z3为系统总扰动估计值,而Z3/b0构成反馈结构,用来补偿扰动,e(t)为误差信号,位置补偿控制量u= u0- Z3/b,u0为吊车运行过程中r和φ的控制量。线性组合控制(LSEF):, 其中、e1为误差信号,、e2为微分信号;u0为虚拟控制量,u表示小车位置控制量。LSEF模块将这些控制量重新组合生成新的控制量,并将其作为系统最终的控制输入。
3 仿真实验
在MATLAB的simulink环境下,搭建仿真框图,其中摆线初始长度l0=56cm,质量Mx =6.157kg,摩擦系数Dx=20.37,行程为0.76m。控制器各部分参数跟踪微分器:r1=40,r2=
60,运用PID调整的经验调整线性组合参数得出k1=8;k2=1.2;k3=0.003;k4=1,符号以构成负反馈为准;线性扩张观测器参数b0=-2.2;wc=50,LQR[3]控制器参数为k1=2.0550;k2=2.3976;k3=-3.0392;k4=-3.1374,为了验证控制器的鲁棒性,给小车施加常值扰动,得到图1位移变化图、图2摆角变化图。
由图1、图2可以看出,LADRC和LQR虽然都有一定的抗扰动性能,但是LADRC在受到扰动时,能迅速地补偿干扰信号,位移和角度曲线能迅速回到参考位移的指定位置,几乎不受干扰信号影响,可见线性自抗扰控制器的抗干扰性能非常强,对工程具有实际指导意义。
4 结论
本文设计的线性自抗扰控制器,实现了三维吊车系统的解耦及调整控制,保证控制的实时性。通过仿真对比LQR控制,得出线性自抗扰控制器具有良好的效果,不仅能迅速消摆,还能在有干扰情况下,获得良好的鲁棒性。
参考文献
[1] 韩京清.自抗扰控制器及其应用[J].控制与决策,1998(1):19-23.
[2]武利强,韩京清.直线型倒立摆的自抗扰控制设计方案[J].控制理论与应用,2004,21(5):665-669
[3] 宋玉琴,路彦刚,邓思成,等.塔吊防摆LQR最优控制器研究[J].测控技术,2019,38(3):131-134.
收稿日期:2020-04-20
作者简介:邓微(1987—),男,湖南新邵人,硕士,助教,从事铁路噪声预测及控制、智能优化的研究工作。
