基于无人飞机成像的桥梁裂缝宽度识别技术研究①
2020-07-22柏江源
柏江源
(湖南高速铁路职业技术学院 湖南衡阳 421000)
通常情况下,桥梁在没有达到使用年限之前就会出现较多病害。在配筋混凝土桥梁中,桥梁出现裂缝是较为常见的病害之一。因此,在桥梁的使用过程中,需要对桥梁裂缝进行及时检测,避免安全事故的发生。传统裂缝检测模式需要利用桥梁检测车,该种模式在检测的过程中需要架设各种设备,效率较慢,且对桥梁的正常通行产生不利影响。利用无人飞机成像技术不仅可以较为便捷的对桥梁裂缝进行检测,且在检测过程中不会影响桥梁的正常通行。
1 无人飞机悬停运动特性
根据公路桥涵养护的相关规定,如果桥梁出现0.2mm的裂缝时就必须进行相关处理。无人机成像受限于其特征,通常情况下在飞行过程中产生的航拍图像分辨率不能达到相关检测要求,且无人机在飞行过程中会由于气流波动等因素干扰最终成像质量。因此,为了将无人机成像系统顺利应用于桥梁裂缝检测活动中,必须对其成像质量和飞行稳定性进行研究。
1.1 无人机成像系统运动性能测试
为了使无人机成像系统应用至桥梁裂缝检测活动中,需要对成像系统的运动特性进行实验。在本实验中,笔者选用了一架八旋翼无人机进行实验,在该无人机机身上安装了成像系统。该套成像系统由激光测距仪、相机、云台、减震系统以及飞行平台等若干组件构成。
在该套成像系统中,影响成像质量的震动来源主要有两方面:第一,经由减震系统减震处理后剩余的震动。第二,飞行过程中气流引起的震动和旋翼旋转产生的震动。为了研究成像系统震动的控制方法以及经由处理后是否能够达到检测要求,需要在该套成像系统的前端位置设置标记点。标记点的数量为4个,OX方向为成像系统拍摄方向。

图1 成像系统标记点示意图
在实验过程中,需要利用专门摄像设备对无人机飞行过程中标记点的变化情况进行拍摄和监测。通过摄像设备的监测,可以测量出标记点在无人机飞行或悬停过程中的位置变化。在实验场地选定方面,为了避免过大风速对测量结果的不利影响,选定了风速小于1m/s的空旷场地的上空。
1.2 无人机成像系统可行性分析
成像质量只要指成像与真实物体之间的差异程度,差异程度越小说明成像质量越好。在进行可行性分析的过程中,采用了扫描法中的光学傅里叶调制传递函数进行计算。该函数是目前用于计算和分析成像质量最为常用的方法。该函数的具体表达公式如下所示:
在以上公式中,表示在单位快门时间内的像移程序,N表示了与镜头相关的参数指标。在可行性实验中,采用了某公司生产的5D Mark单反相机以及镜头,镜头参数指标为焦距24-105mm f/4 IS USM,该套成像系统成像的像素尺寸为5760×3240,在上述公式中,的数值在0~1之间,且该数值越趋向于1,则说明成像系统成像质量越高。
在OY轴以及OZ轴方向上的成像影响情况详述如下:成像设备的拍摄方向的为OX轴方向,因此OY轴和OZ轴在光学系统方向上呈对称分布。由此,可得到以下各式:

在上列各式中,d表示为无人机停滞状态的像的位置,d'表示无人机成像系统在悬停状态的像的位置,f表示摄像设备的光学焦距,H表示拍摄设备和被拍摄对象之间的距离。D表示未产生振动时被拍摄对象的位置,D'表示产生振动后目标的位置。表示拍摄设备的线位移情况,表示在传感器上的像移情况。计算步骤为:将OY轴方向、OZ轴方向的最大值、最小值以及平均值乘以0.1,可以计算出数值,将该值代入
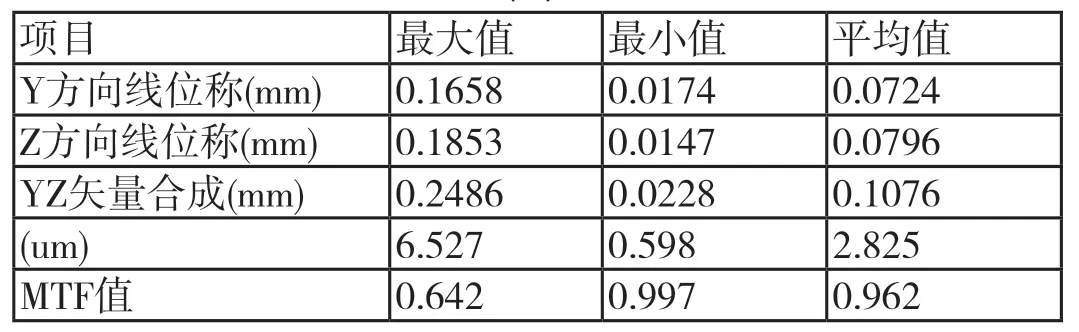
表1 MTF(N)的具体数值
其后,将摄像设备参数代入
最终,获得的具体数值。最大值、最小值以及平均值的具体数值的见表1。
2 像素解析度计算
在进行像素解析度分析时需要运用三点激光测距仪,将测距仪和快门同步测量的物距L带入下式中,并结合透镜的成像原理进行计算。可得下式:

在该式中,L'表示像距,f表示拍摄设备的光学焦距。假定:A为被拍摄目标的真实尺寸,在桥面裂缝检测活动中即代表桥面裂缝的宽度数值,A’设定为成像中的尺寸,可得下式:

将①带入②中,可得下式:

在该式中,A''为拍摄设备产生的像素数值,d表示拍摄设备中图像传感器的长边长度,D表示拍摄设备中图像传感器的长边像素数值,则可得像素解析度计算公式为:
3 无人机成像在桥梁裂缝宽度识别活动中的具体应用
3.1 成像实验
笔者利用八旋翼无人机以及配套成像设备选定了某混凝土桥梁进行了裂缝检测实验,实验表明:在利用了稳定设备并对无人机拍摄回传图像进行相关处理后可以满足相关检测标准的要求。但是在人工手持成像时可能出现拍摄设备抖动量较大出现的图像模糊的情况,在部分情况下还会出现对比度较低的情况。
3.2 无人机回传图像处理
在无人机图像拍摄设备获取图像后,需要针对图像进行处理,以便对桥梁裂缝的准确判定。通常情况下,需要按照如下流程进行图像处理以提取关键信息:第一,利用无人机设备采集桥梁裂缝图像;第二,对无人机回传图像进行灰度处理,灰度处理能够对原始图像进行处理,改善其对比度不足的问题。第三,对图像进行滤波增强处理;第四,进行最大熵阈值分割处理;第五,进行SVM裂缝训练,并将裂缝进行标记和提取;最后,进行裂缝宽度的计算。
4 结语
运用无人机成像系统进行桥梁裂缝的检测与识别相较于传统检测模式具有多种优势,其不仅可以获得符合检测标准的图像,还可以减少由于桥梁检测活动造成的交通拥堵情况。但是,其在运用的过程中也会受到遥控信号、不良天气的影响,需要进一步克服相关难题才能更进一步提升桥梁裂缝检测的效率和质量。
