移动肼站肼-70燃料保障自动监控系统的设计与实现
2020-07-21朱忠华路祥生苗春存
李 斌 朱忠华 路祥生 苗春存 钱 陈 于 文
(1. 空装驻南京地区第四军事代表室,江苏 南京 210042;2. 空军南京航空四站装备修理厂,江苏 南京 210042)
肼燃料是一种性能优良的液体推进剂[1],在催化剂的作用下能迅速分解,提供能量,在国防和航空航天领域有广泛应用。某型飞机的应急动力装置中采用肼-70(70%肼和30%水的混合物)作为燃料[2]。但肼-70燃料是一种易燃、有类似氨臭味、剧毒的均匀透明液体,几十克便能致人死亡,即使不慎闻到肼蒸气也会头晕、呕吐,甚至呼吸困难。在贮存、使用时必须采取严格的安全保障措施,控制环境污染,保障操作人员安全[3],并确保应急动力装置能够在紧急情况下正常启动。移动肼站作为某型飞机应急动力装置的保障装备,主要用于肼-70燃料的贮存、转注、加注、泄回等,由肼-70燃料贮存,肼-70燃料转注、加注、泄回及废气处理,燃料气体监控,视频监控,中和喷淋,温湿度控制和通风换气,应急冲淋,废水处理等分系统组成。自动监控系统具有网络通讯、数据采集分析显示、远程控制、故障报警等功能,一般以PLC和网络系统为控制系统主干,通过上位机用户界面监控系统运行状况。Modbus RTU采用主从应答方式工作,是一种在工业领域广为应用的真正开放的标准网络通信协议[4]。本文基于Modbus RTU通讯协议,采用由采用西门子CPU1215C型PLC为下位机,C#语言开发的基于Modbus RTU通讯协议的上位机界面软件,利用以太网将网络摄像头的监控画面传输至上位机组成自动监控系统,实现移动肼站的运行、远程监控以及故障报警。采用自动监控系统实时检测、采集、分析、显示移动肼站的数据,通过网络通讯实现移动肼站的远程控制,不仅可以保证移动肼站各分系统之间的可靠、协调运行,还能够确保操作人员远程保障肼-70燃料,减少与肼-70燃料的直接接触,并可保证周围环境肼气体浓度在可控范围内。
1 控制系统总体设计
1.1 总体设计方案
控制系统采用上下机形式。下位机为西门子CPU1215C型PLC,通过Modbus RTU通讯协议采集温度、湿度、pH、液位等16个模拟量信号。上位机选用研华科技的PPC-4211W工业计算机,利用RS-485串口通讯抗共模干扰能力强的特点,在Modbus RTU通讯协议的基础上,完成上下位机之间的通讯。图像采集功能利用以太网将网络摄像头的画面传输至上位机[5]。具体控制系统如图1所示。

图1 肼站控制系统Fig. 1 Monitoring system for hydrazine station
1.2 硬件设计
PLC采用西门子CPU1215C型,外加CM1241通讯模块、CB1241通讯模块和I/O扩展模块。系统中设计的输入输出点和模拟量见表1,模拟量为通讯中间变量。西门子1200系列PLC定位于“低端的离散自动化系统和独立自动化系统中使用的小型控制器模块”,充分考虑了系统、控制器、人机界面和软件的无缝整合和高效协调的需求,特别是其面向小规模装置的可编程控制器,具有符合不同用途的通信功能,如:与控制柜内的显示器及变频器的连接、远程监控等[6],尤其适合应用于移动肼站自动监控系统。
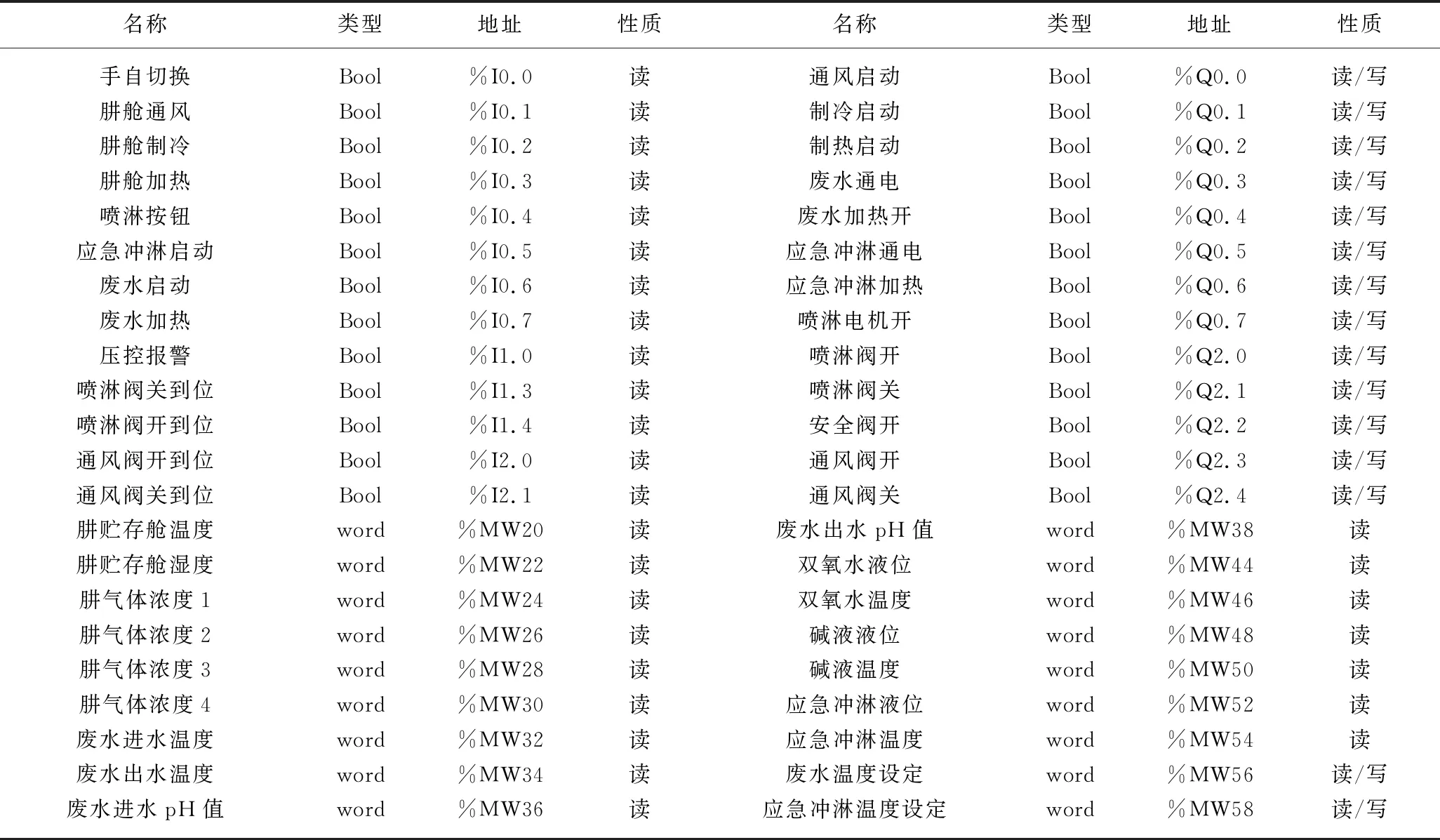
表1 PLC变量表
1.3 监控要求
移动肼站在进行肼-70燃料贮存、转注、加注、泄回等过程中,主要有以下监控要求: 4个肼气体传感器实时监测肼-70燃料贮存系统内及周边的肼气体浓度,当任意1个肼气体传感器检测到肼气体浓度超过5 ppm时进行声光报警同时启动通风;当任意3个肼气体传感器同时检测到肼气体浓度超过50 ppm时启动中和喷淋;控制肼-70燃料贮存系统内温度(5~30 ℃)、相对湿度(35%~70%);2个摄像头实时视频监控肼-70燃料贮存系统的状态,并每隔1小时存储为一个AVI格式文件,循环删除30天以前存储的AVI格式文件;监控清水温度(40 ℃~50 ℃)以满足操作人员应急冲淋需求;监控废水处理系统水处理的温度(60 ℃~70 ℃)、pH值(6.0~7.0)。工艺流程图如图2。
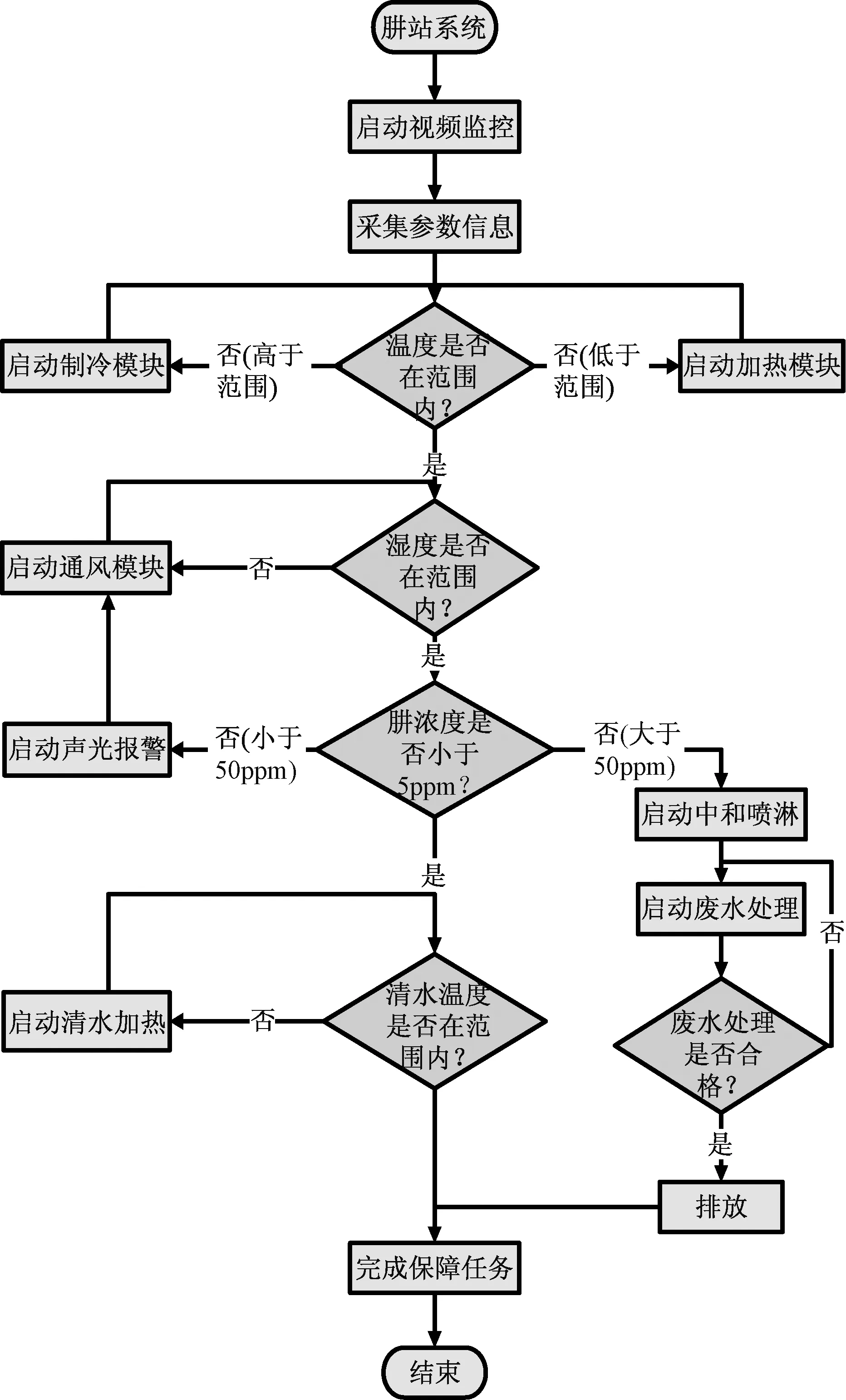
图2 肼站工艺流程Fig. 2 Technological process for hydrazine station
1.4 PLC作为主站采集模拟量参数
PLC的程序编写软件为TIA PORTAL V14,通讯测试软件为串口助手。在整个控制系统中,控制要求由传感器采集的参数来判断。在移动肼站自动监控系统中,参数的采集以PLC做Modbus RTU主站,轮询16个传感器,运行程序如图3。轮询是由PLC按照Modbus RTU协议定时发送03功能码查询,收到或报错均发送下个地址位的查询指令,直到查询完全部传感器,返回第一个地址,周而复始,以实现参数的实时采集[7]。程序的跳转采用步序控制方式触发查询指令的发送,采集的参数存入寄存器。
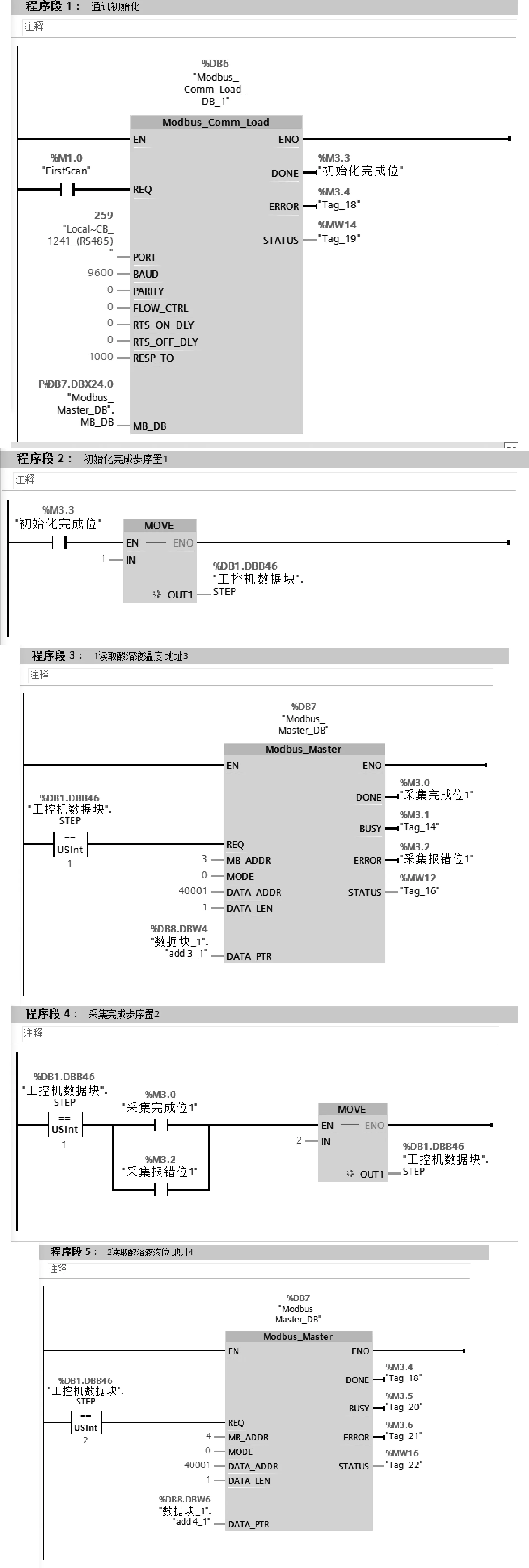
图3 运行程序Fig. 3 Operational procedure
1.5 界面软件作为主站实现数据显示
西门子公司没有公开通信协议,本文通过编程语言自行开发上位机程序,要求开发者具有较高编程水平,开发周期长,但具有灵活、成本低的优点[8-9]。上位机界面软件采用C#作为开发语言,数据库采用ACCESS数据库,应用Visual Studio 2010为开发环境实现。为保证系统安全,登录系统时需用户输入用户名和密码,而且需保留每个传感器的参数曲线以及手动操作,因此需要一个数据库来记录。
本系统上位机界面软件与下位机PLC采用Modbus RTU通讯协议,物理层使用USB-RS485串行通讯接口,以上位机界面软件为主站,下位机PLC为从站,主站根据Modbus RTU协议发送03功能码读取保持寄存器DB1数据块中的前20个字(采集到的16个传感器和手自切换、通风启动、肼舱通风、制冷启动等开关量信号参数信息),发送06写入功能码设置通风启动、制冷启动、制热启动、废水温度设定、应急冲淋温度设定等参数。为保证数据传输的正确性,RTU模式采用CRC校验[10],错误率能够小于1/10亿。界面软件通讯指令见表2。
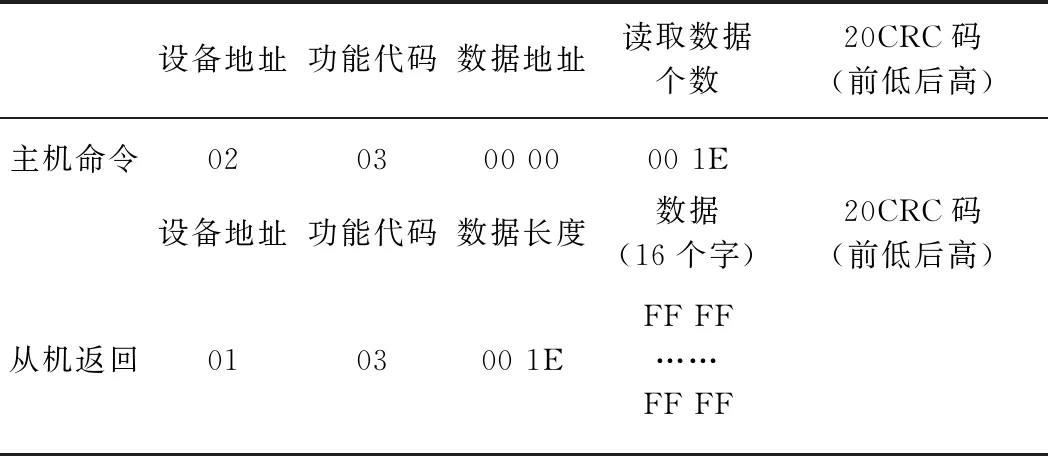
表2 界面软件通讯指令
2. 设计结果
将PLC程序通过网线下载,连接好PLC与工控机之间的USB转485通讯电缆。设置摄像头IP地址与工控机为同一网关。启动运行软件,PLC与视频通讯均正常,实际运行画面如图4。该界面软件具备运行监控、历史数据、故障查询、操作手册等四项功能,能够记录故障时间节点,一段时间内的传感器参数以及翻阅操作指南。运行监控画面可将移动肼站各分系统的运行状态集中显现出来,并能够实现手动控制。将摄像头的采集画面内嵌在整个界面中,并进行通讯检查。

图4 运行画面Fig. 4 Running screen
3. 结论
本文基于Modbus RTU通讯协议,以下位机PLC做Modbus RTU主站,实时采集移动肼站内部16个传感器数据以实现所需参数监控,利用以太网将网络
摄像头的画面传输至上位机界面软件,利用自主开发的上位机界面软件集中实时显示和监测移动肼站各分系统的运行状态,并可以进行手动、自动控制以及控制参数的设置。移动肼站肼-70燃料保障自动监控系统选用西门子CPU1215C型PLC,通过编程语言自行开发界面软件,采用轮询方式进行控制参数的实时采集,RTU模式采用CRC校验,具有系统参数采集及时、数据传输准确、运行稳定可靠、性价比高、维护成本低等优点。经实践证明,移动肼站肼-70燃料保障自动监控系统运行界面友好,能够确保移动肼站各分系统的正常运行和远程监控,可以保证操作人员进行肼-70燃料贮存、转注、加注、泄回等操作时的环境安全,应用效果良好。
