基于Creo的仿生马铃薯培土器设计及仿真分析
2020-07-20姚永亮沈鹏魏光程
姚永亮 沈鹏 魏光程
摘要:针对云南省丘陵山地中马铃薯种植区地形复杂、土壤黏性较大、培土阻力大等特点,在现有市场培土器的基础上对其进行仿生优化设计,目的是为了减小培土过程中的阻力,降低微耕机功率消耗。前期工作包括对马铃薯种植区的耕作条件及土壤相关数据的采集,以及农机市场的调研等。然后利用Creo软件对培土器进行三维建模,进行导曲线拟合优化,添加仿生凸包。该培土器的设计适用于60~75 cm的垄距作业,通过仿生优化之后,有效减小了土壤的黏附,降低了450 N的培土阻力,减阻率达到37.5%,培土效果符合相关的马铃薯种植农艺要求。
关键词:Creo建模;导曲线拟合;仿生凸包;培土器;马铃薯
马铃薯是我国继小麦、水稻、玉米之后的第四大作物[1-2],也是云南省传统的种植作物。在马铃薯的种植过程中,中耕培土作业是必不可少的环节,培土质量的好坏直接关系着马铃薯的生长和质量[3]。云南省农用地多为丘陵山地,马铃薯种植区表现地块小、地形复杂等特点,兼之云南省黏重土壤面积高达245 hm2,这种土壤因其含水率的不同而表现出不同的性状:当含水率高时,土壤黏性增大,容易产生壅土,同时使得培土部件的黏附增大;当土壤干燥时,容易结块,又使得挖掘碎土阻力增大[4]。这些因素使得大型农机无法适用,而小型农机却又存在动力不足等问题。因此对马铃薯培土器进行优化设计,以实现培土过程中的减黏降阻就显得尤为重要。
云南省马铃薯栽培模式也不尽相同,依据不同区域特点、种植习惯等因素主要形成了垄作、平作、单垄单行、单垄多行等种植模式,并且人工起垄占很大比重,垄行也很难有统一标准,因此培土器很难有固定的类别。笔者所在课题组设计了一种马铃薯培土器,适用于单垄单行、垄距为60~75 cm的种植模式。
1 整体结构及工作原理
1.1 总体结构设计
马铃薯培土器结构如图1所示。该培土器主要由左右侧板、仿生凸包、支撑板、底板以及深度调节杆组成。整体结构简单紧凑,各零件之间通过焊合连接在一起。培土器通过深度调节杆与微耕机的牵引机架相连接。
1.2 工作原理
马铃薯培土器主要用于马铃薯的中耕管理阶段,一般来说整个中耕管理阶段需要1~2次培土。
培土时铲尖入土并破碎土壤,同时锄掉垄行间的部分杂草,随后土壤沿着培土器的表面不断被抬升并且到达培土器翼部,到达翼部时,在土壤的重力以及翼部曲面提供推力的共同作用下,土壤将会被推向垄边以及抛向垄顶,达到松土、覆盖肥料和除杂草、培土、修垄的目的。
2 培土器关键部件以及主要参数的设计
2.1 培土器侧板设计
以培土器的右側板为例,培土器曲面绘制和犁体曲面一样,可以看做是犁体曲面的一种。目前,曲面绘制的方法主要由水平直元线法、倾斜直元线法、曲元线法和翻土曲线法等几类[5]。该培土器侧板是采用水平直元线法利用三维制图软件Creo绘制而成的(图2)。
2.1.1 导曲线的确定 现代仿生学表明,生物经过长期的演变,其身体构造、体表特征已进化得与所处环境极为契合。长期生存于土壤环境中的田鼠,其爪趾结构特征能够成功减小田鼠在挖掘土壤时的阻力。该培土器侧板的导曲线则利用已有的学者研究成果[6],对田鼠爪趾内轮廓曲线进行拟合,并截取其中一段,导曲线方程为:
又因马铃薯中耕培土的耕深要求为100~150 mm,因此截取导曲线的开度L=128.5 mm,导曲线高度L1为170 mm。L1与L的比值即纵深比为0.76较符合相关的理论研究[7],入土角为30°。
2.1.2 元线角及元线长 元线角采用抛物线中的某段函数线型再根据垄形进行适当调整,元线角方程为: Y=0.001 4x2-0.098 1x+33.755(22.5 调整后的元线曲线与元线角相识度r2=0.95,其中θmin为30°,θmax为58°。
自下而上所取元线编号依次定义为1~10,其参数见表1。
2.2 仿生凸包的设计
相关研究表明,某种非光滑表面的减阻与脱附效果要优于光滑表面,朱凤武经调查研究得出几何非光滑体表是土壤动物减黏降阻的原因之一[8]。本研究以蜣螂球冠凸包为原型,借用前人的研究结果,来设计仿生凸包,以实现培土过程中的减黏降阻[9-10]。
凸包的直径D拟取为4 mm(蜣螂球冠凸包的底边的平均直径近似于3.87 mm),球冠高度h=D×(1-1.732÷2)。
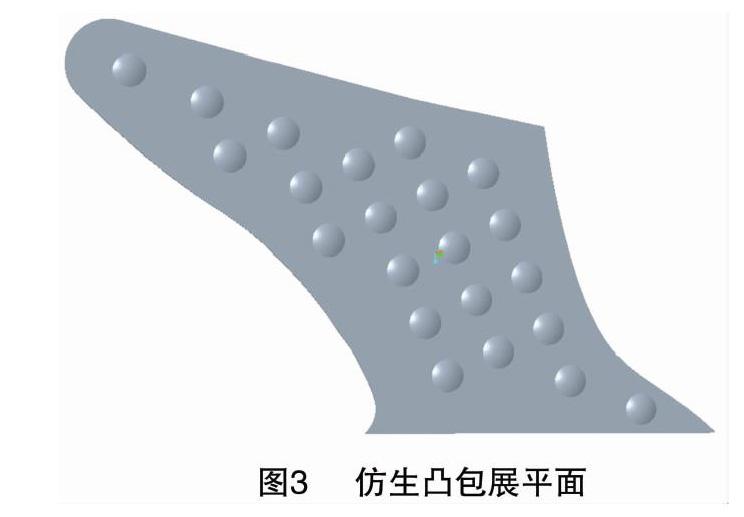
h拟取为0.536 mm,考虑到加工等因素,因此将在球冠模型基础尺寸上同时扩大5倍,得底边直径为20 mm的圆,高为2.68 mm的球冠模型,即为仿生凸包的基本尺寸(图3)。
在软件Creo中利用命令“展平面组”以培土器侧板的最下端为基点对曲面进行展平面,在展开后的平面上,仍是以下端点为定位中心,首个凸包的定位尺寸为长50 mm、高25 mm,剩下凸包则以命令“填充阵列”进行间距尺寸35 mm、边界距离20 mm,绕旋转中心为15°的方式进行生成,仿生凸包绘制完成后,通过命令“展平面组变形”将展开的平面还原到原曲面。
3 仿真处理
3.1 培土器材料选用
为研究及验证培土器培土过程中的动态特性,我们通过ANSYS中的LS-DYNA模块对2种培土器进行仿真及动力学分析。
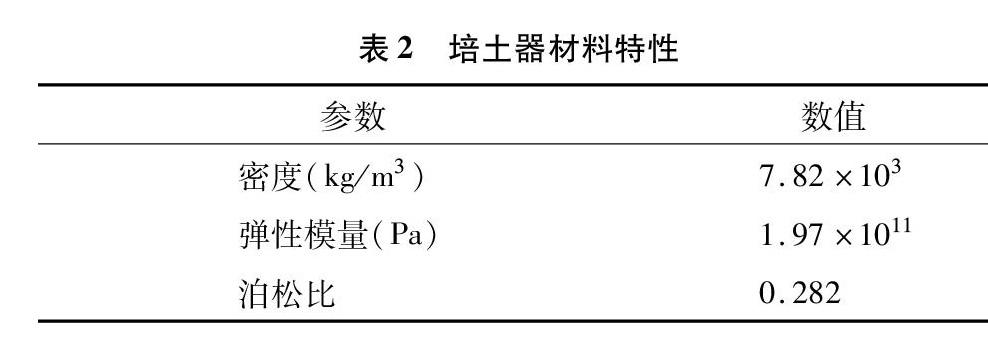
根据相关资料[11],2种培土器材料均选用 65 Mn,材料模型见表2。
土壤特性较为复杂,具有非线性、弹塑性、黏弹性及流变性等特征。又因云南省本地土壤黏性强、比阻大,因此对于土壤模型的选用选取LS-DYNA中的MAT147材料[12],土壤模型参数见表3。
土壤模型的尺寸选为500×600×230 mm,因为土壤形状比较简单,因此,直接在ANSYS软件中构建。
3.2 仿真结果
根据相关农艺要求,马铃薯培土过程中,入土深度为100~150 mm,因此2种模型得入土深度统一定为130 mm,再根据田间实测的数据,设定2个模型的初始速度皆为0.5 m/s(图4)。
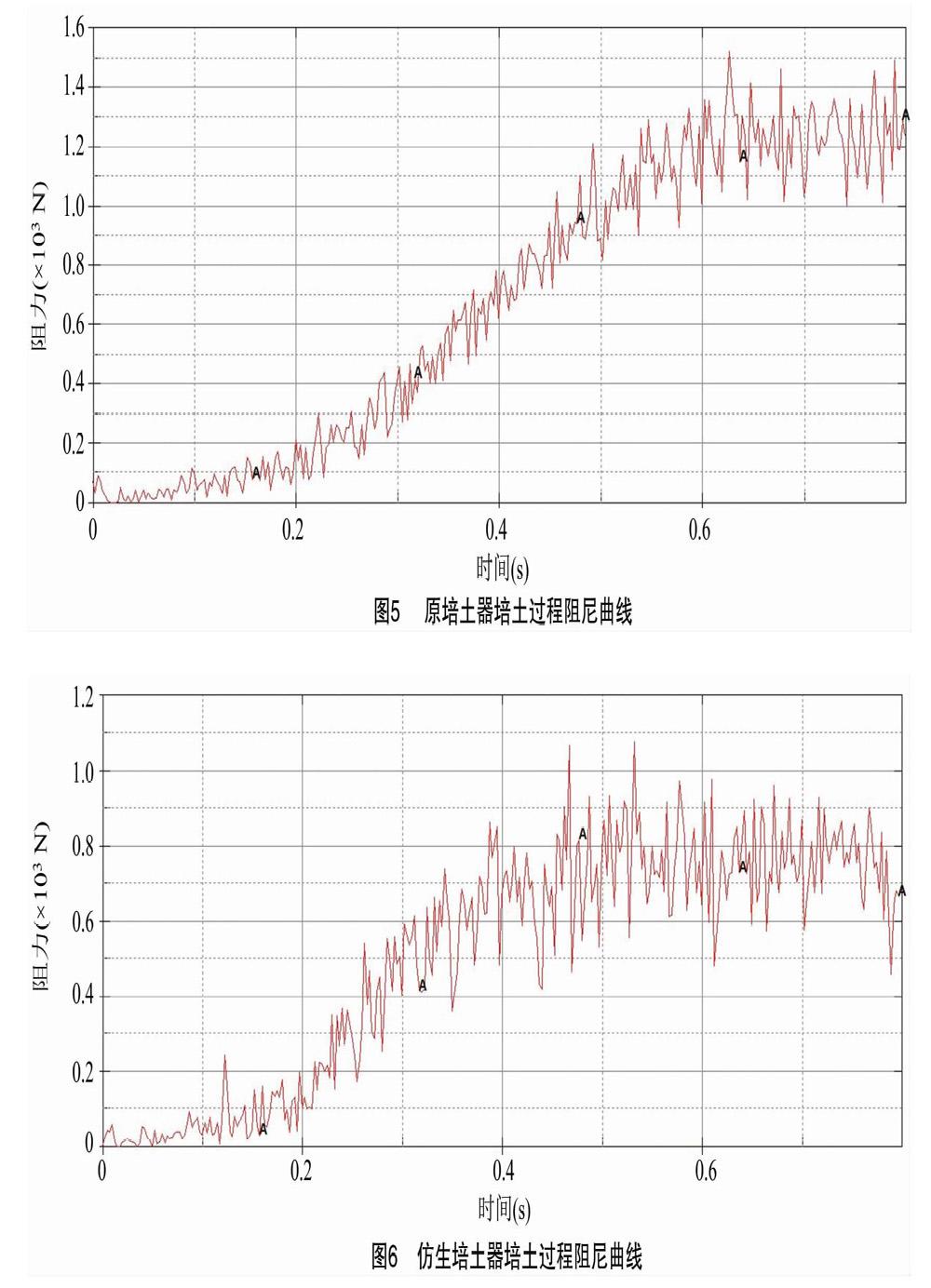
导出K文件并通过ANSYS LS-DYNA求解器进行求解计算,通过LS-PREPOST查看求解结果如图5、图6所示。
从图5、图6可以看出,培土器在培土过程中的阻力不断增大,最终趋于稳定并在某一范围内来回波动;这是因为在整个切削土壤的过程中,首先是培土器入土部件接触土壤,随着时间的推移,切削面积不断增大,最终当切削面积不再变化时,培土阻力也将稳定在某一范围内来回波动,造成这种波动的原因是导曲线的曲率是在不断变化的,同时土壤单元在其上滑动的过程中会出现应力变化。原培土器在0~0.6 s内阻力在逐渐增大,最大值为 1 525 N,平均值在1 200 N左右波动;仿生培土器在 0~0.4 s 内阻力不断增大,最大值为 1 076.8 N,平均值在750 N左右波动。
4 结论
本研究提出了一种基于Creo软件设计的马铃薯仿生培土器,具有结构简单、紧凑,耕深可在一定范围内调节的特点。但适用范围具有一定的局限性,仅适用于垄距为65~75 cm的种植模式。
仿生培土器主要是对导曲线以及培土器曲面进行了仿生优化,并且通过仿生优化成功达到了减阻的目的,由原来的1 200 N左右减少至750 N左右,减阻率约为37.5%。
参考文献:
[1]宋言明,王芬娥. 国内外马铃薯机械的发展概况[J]. 农机化研究,2008(9):224-227.
[2]卢肖平. 马铃薯主粮化战略的意义、瓶颈与政策建议[J]. 华中农业大学学报(社会科学版),2015(3):1-7.
[3]张丽华,康 林. 呼伦贝尔市海拉尔区马铃薯大垄机械化种植技术[J]. 江苏农业科学,2018,46(14):67-71.
[4]宁旺云. 云南马铃薯机械化生产现状及发展对策[J]. 安徽农业科学,2011,39(34):21497-21498.
[5]北京农业工程大学. 农业机械学(上册)[M]. 北京:中国农业出版社,1994:110-111.
[6]張 鹏,郭志军,倪利伟,等. 触土曲面准线曲率特征及其减阻性能分析[J]. 农机化研究,2017,39(2):11-16,21.
[7]郭志军,周志立,张 毅,等. 土壤耕作部件仿生优化设计研究[J]. 中国科学(E辑:技术科学),2009,39(4):720-728.
[8]朱凤武. 金龟子形态分析及深松耕作部件仿生设计[D]. 长春:吉林大学,2005.
[9]李建桥,任露泉,陈秉聪. 土壤动物非光滑体表几何单元的统计分析及模拟[J]. 农业工程学报,1995(2):1-5.
[10]田丽梅,任露泉,韩志武,等. 仿生非光滑表面脱附与减阻技术在工程上的应用[J]. 农业机械学报,2005(3):138-142.
[11]王万钧. 农业机械设计手册[M]. 北京:机械工业出版社,1988:580-600.
[12]张红松,胡仁喜,康士廷,等. ANSYS14.5/LS-DYNA非线性有限元分析实例指导教程[M]. 北京:机械工业出版社,2013.赵献立,王志明. 机器学习算法在农业机器视觉系统中的应用[J]. 江苏农业科学,2020,48(12):226-231.
