基于模糊控制的驾驶员模型研究
2020-07-20夏道华张庆才宋龙龙王翰涛
夏道华 张庆才 宋龙龙 王翰涛
摘 要:通过对驾驶员模型的深入研究,将驾驶员的年龄、性别、驾龄等特性利用模糊控制的方式融入到驾驶员模型建立中去,建立的新驾驶员模型更接近真实驾驶员实际情况,并通过建立仿真模型进行了验证。
关键词:模糊控制;驾驶员特性;驾驶员模型
中图分类号:U471 文献标识码:A
doi:10.14031/j.cnki.njwx.2020.07.012
Research on Driver Model Based on Fuzzy PID Control
Xia Daohua1, Zhang Qingcai1, Song Longlong1, Wang Hantao2
(1. Shandong Vocational College of Science and Technology, Weifang 261000,China;
2. Dalian University of Technology, Dalian 116024,China)
Abstract: Through in-depth research on the driver model, the driver 's age, gender, driving age and other characteristics are integrated into the driver model using fuzzy control. The new driver model is closer to the actual driver 's actual situation. And verified by establishing a simulation model.
Keywords: fuzzy control; driver characteristics; driver model
汽车驾驶员模型是对真实驾驶员驾驶操纵行为的高度模拟的数学模型,是一个十分复杂的控制系统。驾驶员操纵汽车的行为包括对外界信息的感知、判断、推理、综合决策等阶段,最后通过神经肌肉的反应产生汽车所需要的转向控制、速度控制、油门控制以及制动控制等操纵力。目前有许多学者对驾驶员模型进行了深入研究,提出了大量的驾驶员模型,有采用自适应网络的模糊推理系统建立的二输入参数纵向驾驶员模型和考虑未来预期车速影响的预瞄纵向驾驶员模型[1]。有提出基于BP神经网络的驾驶员制动行为模型,预测较为准确,模型有效[2]。通过学习前人的研究结果,发现在研究驾驶员模型时,研究驾驶员个体差异对模型的影响的相关成果较少,因此本文基于前人对驾驶员模型研究的基础,利用模糊控制建立考虑驾驶员特性的驾驶员模型,该模型更加符合实际驾驶员的驾驶行为。
1 驾驶员特性
特性指的是某事物所特有的性质或特殊的品性、品质。根据特性一词的解释,我们可以这样来定义驾驶员特性,即驾驶员在驾驶过程中所表现出来的与其他活动所不同的特有品性、品质。在车辆运行过程中,驾驶员通过视觉、听觉、触觉器官从交通环境中获取信息,然后经过大脑进行处理,做出判断和反应,再用脚和手等运动器官操纵汽车行驶,使其按驾驶员的意志在道路上行进。在行驶过程中,驾驶员要受到自身一系列生理、心理因素的制约和外部条件的影响,如果在信息的感知、判断和处理的任何环节上出现问题,都会造成交通安全事故,因此驾驶员是交通参与者中最重要的部分之一,研究驾驶员个体特性对驾驶员模型的影响具有非常重要的作用。影响驾驶员驾驶行为的因素较多,主要包括驾驶员年龄、驾驶员性别、驾驶员驾龄、疲劳程度以及驾驶员性格等,要包含所有的影响因素,难度较大,也不切实际。一般的研究思路是,把影响驾驶员驾驶行为的主要因素作为研究对象,以达到简化模型的目的,随着后期研究的不断深入,可以把一些其他的影响因素加入到研究模型里面,提高驾驶员模型的控制精度,本文就其中的驾驶员性别和驾驶员驾龄以及驾驶员疲劳程度进行研究,其他影响因素会在后续的研究中继续进行。
2 模糊控制
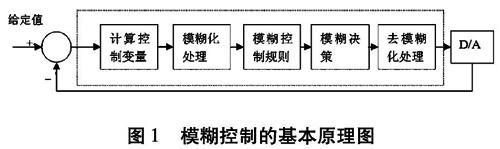
模糊控制是以模糊集理论、模糊语言变量和模糊逻辑推理为基础的一种智能控制方法,它是从行为上模仿人的模糊推理和决策过程的一种智能控制算法。该方法首先将专家经验编成模糊规则,然后将来自传感器的实时信号模糊化,将模糊化后的信号作为模糊规则的输入,完成模糊推理,将推理后得到的输出量加到执行器上。模糊控制的基本原理如图1所示。
由于影响驾驶员驾驶行为的因素众多,且这些因素难以用精确的数学模型表达,采用模糊控制可以简化驾驶员模型设计的复杂性,不需要依赖于驾驶员特性的精确数学
模型,用语言式而不用数值的模糊变量来描述模型,模糊控制器不必对驾驶员模型建立完整的数学表达式,因此采用模糊控制器研究驾驶员特性,可以达到较好的效果。
3 建立驾驶员模型
3.1 PID控制器的设计
驾驶员模糊PID控制器根据偏差和偏差变化率输出PID参数KP、KI、 KD,能够实现PID参数的在线整合,具有控制适应性及灵活性强的优点,且具有PID控制精度高的优点,能够完成驾驶员特性的研究。
3.2 预瞄环节
预瞄环节根据当前车辆横轴方向位置,根据期望路径和预瞄距离,计算出预瞄点位置,并结合车辆当前位置,计算出当前期望的车辆前轮偏角,来控制车辆的转向。
3.3 信息感知环节
该环节主要感知周围环境,并把感知到的信息去噪后输入到模型中,经过分析之后做出判断。
4 建立仿真模型
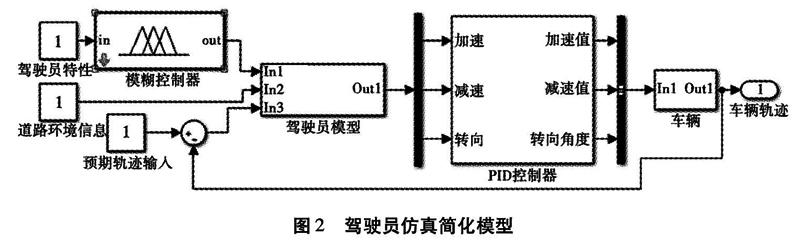
在MATLAB/Simulink仿真環境下建立驾驶员仿真简化模型,仿真模型如图2所示。
5 总结与展望
通过将驾驶员的年龄、性别、驾龄等特性通过模糊控制的方式融入到驾驶员模型中去,建立的新驾驶员模型将更接近真实驾驶员实际情况,使驾驶员模型具有更强的鲁棒性和稳定性。
参考文献:
[1] 沈沛鸿,赵治国,郭秋伊. 基于ANFIS的工况跟踪用纵向驾驶员模型开发[J]. 汽车工程 , 2019(7):815.
[2] 王超,郭孔辉,许男,等. 表征驾驶风格和驾驶员能力的驾驶员模型[J]. 北京理工大学学报,2019,39(1):45.
[3] 刘志强,王玲,贾海江,等. 基于 BP 神经网络的驾驶员制动行为模型研究[J].机械设计与制造,2019(6):37.
[4] 卢艳楠,岳立喜,梅桂静,等. 汽车驾驶员模型建立[J].电子世界,2013(13):115.
作者简介:夏道华(1987-),男,山东维坊人,助教,研究生,从事汽车安全方面研究。
