综合管廊吊轨式巡检机器人系统应用探究
2020-07-20张津
张 津
(深圳市市政设计研究院有限公司,深圳518029)
0 引言
1 系统框架
巡检机器人系统以监控平台为基础和核心,由巡检机器人软件模块、轨道总成、供电总成、通信总成、巡检机器人本体及其他相关设备组成,通讯传输采用TCP/IP 综合数据网络+WiFi 无线信号网络相结合一体的网络通讯系统,以达到远程集中监测、集中显示报警、集中联动控制和集中管理的目标。 如图1 所示,为巡检机器人系统架构图。

图1 巡检机器人系统架构图
2 系统应用
2.1 机器人设置
机器人是整个系统的核心组成部份,承担管廊内巡检和现场处置的主要作用,其本体具备机器人自检、视频监控与图像识别、红外成像与火灾监测、环境监测、语音对讲等功能。
机器人横断面布置:在工艺专业进行管廊横断面设计之时,需考虑机器人的运行空间(目前主流机器人尺寸为400mm×400mm),统筹各专业设备在舱室顶部的排放布置,其中沿管廊通长布置的设备主要为消防灭火装置、电气照明灯具、自用线槽以及机器人轨道,设计时应保证各设备的正常运行不受干扰。 若断面空间受限,可在满足规范要求情况下,利用管廊竖向上的空间保障设备正常运行。 具体布置如图2 所示。

图2 巡检机器人横断面布置图
目前机器人的运行速度为2.5m/s。 假设机器人在最不利的位置时管廊发生警报,应保证其在15min 的响应时间内到达事故现场,同时结合当前巡检机器人的造价指标等因素考虑,在设计区域布置时按每2 000m 巡检区域配置1 台巡检机器人,可经济、高效地实现对管廊状态连续、动态的数据采集及系统存储。
2.2 附属系统设置
2.2.1 供电系统
巡检机器人采用分布式充电桩为其供电。 充电桩在设计时,应根据机器人电池容量、充放电时间,结合运行工况和防火门间隔、应急响应速度等因素进行布置,并留有一定的安全余量,以满足机器人巡检过程中电力供应的可靠性要求。
经过多个管廊项目应用经验,设计可按照每1 000m 巡检区域设置1 套分布式充电站,每个充电站轨道安装1 个充电座。 充电站采用舱室内就近配电箱交流220V 作为电源输入,具备浪涌防护能力。充电电压为34 ~42V,充电电流为2 ~6A,功率不超过260W。 巡检机器人到达充电站时,经系统检测确认后,开始为其充电,平时断开,安全可靠。
2.2.2 无线通信系统
GLU、FINS、FFA水平较NF组升高(P<0.05)。HF+LBBR组和HF+HBBR组GLU、FINS、FFA较HF组明显下降(P<0.05);高脂喂养时,随着小檗碱剂量增加,FINS水平进一步下降(P<0.05)。
巡检机器人的通信系统采用高速无线通信方式实现机器人与综合管廊后台监控系统的互联。巡检机器人所有的控制信号、视频数据、音频数据、现场传感器采集数据及报警信息等通过无线网络实现远程的通信和交互。
管廊无线通信系统每个防火分隔内按照每100m 左右配置1 台无线AP 进行设计。 数据通过每个AP 传输到设备间的交换机,并经由光纤环网与管廊的中心交换机实现高速通信链接。 如图3 所示,为机器人通信系统图。

图3 机器人通信系统图
为了保证这些数据能够通过交换机稳定传输,交换机采用环形连接的方式,当“通信环”其中一个点断开时,数据将通过另一个方向进行传输,将巡检机器人现场的工作和巡检情况实时传输到监控中心的数据服务器中。
2.2.3 自动防火门系统
为了使巡检机器人能够穿越防火隔离墙,对相邻舱室进行长距离连续巡检,需设置专门供巡检机器人穿越的自动防火门。
在管廊舱室内每个防火分隔上方设置独立的钢制甲级防火门,并配备电控系统,最大防火时效可达1.5h。 防火门尺寸不大于500mm(高) ×500mm(宽)。 自动防火门的设计还需要考虑故障安全的原则,在失去外部电源的情况下,应保证防火门处于关闭状态。

图4 机器人防火门示意图
图4 为机器人防火门示意图,机器人自动通过防火门的开关门原理为:机器人运行至防火门前1m→给控制器信号→控制器发出开门信号→防火门打开→机器人传感器检测门打开状态→机器人通过→通过1m 后关门→传感器检测关门状态→给控制器已关门信号→完成。
2.2.4 机器人轨道系统
机器人的运行方式采用自动行走的悬挂轨道式设计,巡检机器人由电机驱动行走,坡道采用在轨道上镶嵌爬升装置,满足大角度爬坡。 机器人轨道单节长度4 000mm、宽80mm,重量达1.5kg/m,沿舱室顶部通长敷设。
地下管廊通过干支结合系统成网,形成了很多T型路口或十字型接口。 因此,当吊轨巡检机器人遇到分岔路口时,为了让巡检机器人能够到达指定的位置,可以在轨道中安装换轨装置,将不同方向的轨道连接起来。 如图5 所示,为机器人换轨装置示意图。

图5 机器人换轨装置示意图
机器人轨道在敷设过程中受管廊路由弯曲度、纵断坡度及通风口、进料口、逃生口、管线出舱节点等因素影响,可形成弧形轨道,在相关节点位置水平向两侧或垂直方向拐弯通过,拐弯半径控制在800~1 000mm,图6~7 为机器人轨道敷设示意图。
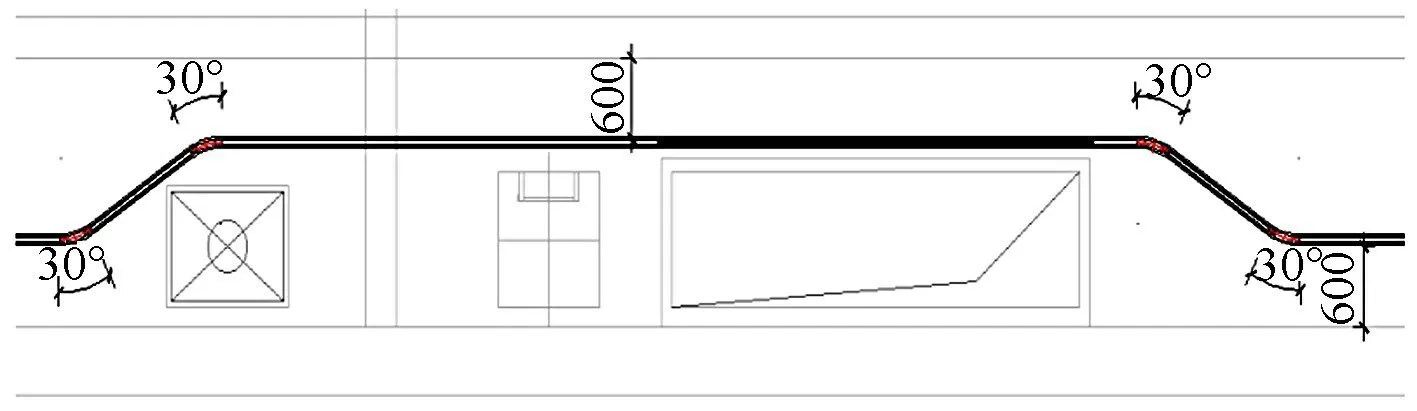
图6 机器人轨道敷设示意图(一)
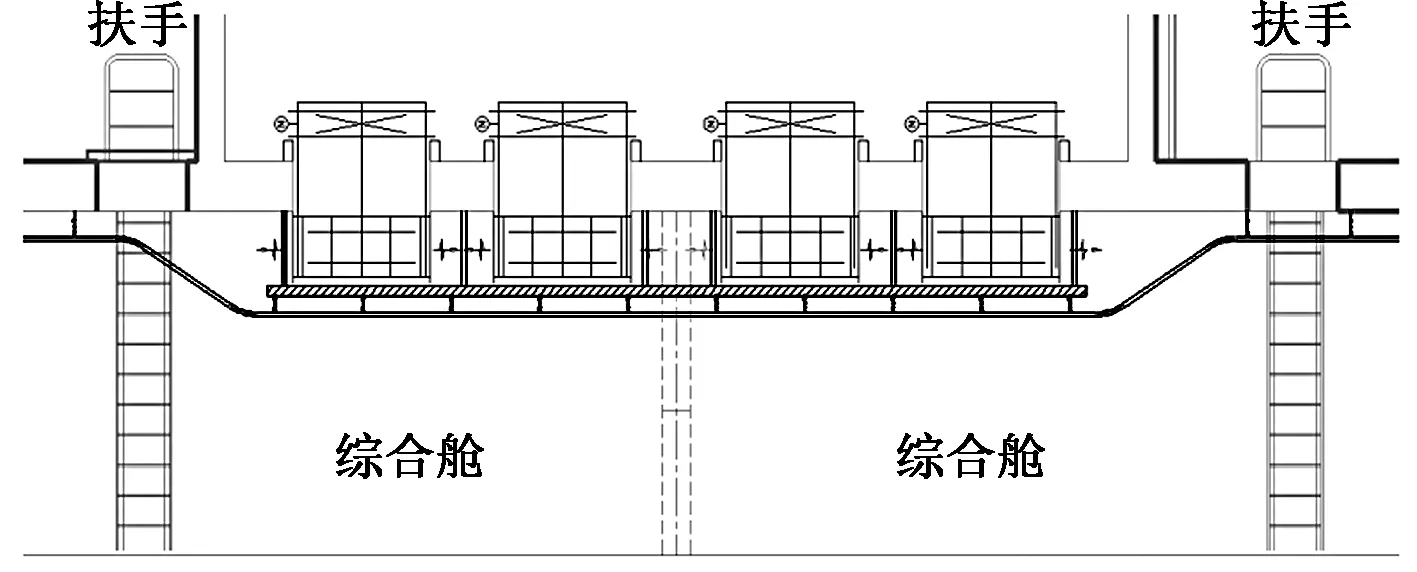
图7 机器人轨道敷设示意图(二)
2.3 远程控制
巡检机器人的后台控制系统主要用于对机器人及现场环境的监控,实现机器人与运维人员远程交互。 运维人员可通过后台对机器人进行手动操作,并获取机器人巡检的数据和机器人工作状态。
在已经建成的管廊项目中,后台系统已与监控中心综合监控平台有机地结合一起,集成为一个相互关联和协调的综合系统。 后台控制系统作为智能化的信息中转站,将机器人的巡检数据按照规范要求进行存储和分发,用于现场的安全管理和技术诊断。 图8 为综合监控平台展示示例。
3 结束语
综合管廊在设计之初就应考虑适用机器人巡检的结构化环境,优化巡检机器人设计和安装步骤,降低机器人成本,提高机器人运维的可靠性。
随着人工智能和机器人技术的快速发展,综合管廊巡检机器人将不断实用化,并逐渐替代运维人员实现智慧管廊的少人或无人值守,显著降低巡检人员劳动强度,提高巡检效率和质量,保障城市生命线工程的安全,提升综合管廊的智慧安全管理水平。
