北斗高精度智能交通系统的设计及测试
2020-07-18王荣蔺陆洲路鹏飞宋娟
王荣 蔺陆洲 路鹏飞 宋娟


摘 要:北斗卫星导航系统是中国自行研制的全球卫星导航系统,也是继GPS、GLONASS之后的第三个成熟的卫星导航系统。中国软件评测中心通过实施基于北斗高精度导航定位的智能交通应用示范项目,开发出了由中心服务子系统、全球导航卫星系统(GNSS)基准站子系统、车载终端子系统和人员终端子系统构成的北斗高精度导航定位系统,以及与校车应用场景相配套的路径规划算法和联合定位算法,演示系统在泰国进行了部署与测试,对其电子围栏、实时轨迹、轨迹回放功能进行了验证,并对其车载终端单点定位精度、RTK定位精度、车载终端速度精度、人员终端单点定位精度、人员终端伪距差分精度等关键性能指标开展了测试,测试结果进一步验证了北斗高精度智能交通系统在国内外的应用可行性。
关键词:澜沧江-湄公河;北斗卫星导航系统;智能交通;高精度
中图分类号: TN967.1 文獻标识码:A
Abstract: BeiDou navigation system is the self-developed Global Navigation Satellite System of China and the third mature satellite navigation system after GPS and GLONASS. China Software Testing Center developed the BeiDou high precision navigation system by implementing the demonstration of intelligent transportation based on BeiDou Navigation Satellite System project. The system includes central service subsystem, GNSS reference station, vehicle terminal subsystem and personal terminal subsystem, using the path planning algorithm and the joint localization algorithm which match with the school bus demonstration scene. The system was deployed and tested in Thailand, and its electronic fence, real-time track and track playback functions were verified, and the key performance indexes of its vehicle terminal single point positioning accuracy, RTK positioning accuracy, vehicle terminal speed accuracy, personnel terminal single point positioning accuracy, Personnel Terminal pseudo-range differential accuracy were tested. The test results verify the application feasibility of BeiDou high precision system at home and abroad, and promote the application and popularization of Beidou Global System.
Key words: lancang river-mekong river; BeiDou navigation system; intelligent transportation; high precision
1 引言
北斗卫星导航系统(本文简称北斗系统)是我国着眼于国家安全和经济社会发展的需要,自主建设、独立运行的全球卫星导航系统,是为全球用户提供全天候、全天时、高精度的定位、导航和授时服务的国家重要空间基础设施。我国高度重视北斗系统建设发展,自20世纪80年代开始探索适合我国国情的卫星导航系统发展道路,形成了“三步走”发展战略。2000年年底,建成北斗一号系统,为国内提供服务;2012年年底,建成北斗二号系统,为亚太地区提供服务;计划2020年前后,建成北斗三号系统,为全球提供服务。预计2035年前,将以北斗系统为核心,建设完善更加泛在、更加融合、更加智能的国家综合定位导航授时(PNT)体系。当前,北斗系统基本导航服务在全球的性能指标为定位精度水平10m,高程10m(95%置信度),测速精度0.2m/s(95%置信度),授时精度20ns(95%置信度);在亚太地区,定位精度水平5m,高程5m(95%置信度)。采用差分定位技术,可实现实时亚米级、厘米级和事后毫米级高精度定位[1]。
北斗卫星导航系统在牵引学科建设、辐射创新发展的同时,也已成为服务国民经济发展的中坚力量之一。北斗卫星导航系统现已覆盖亚太大部分地区,可为澜沧江-湄公河区域合作国家提供智能交通、智慧旅游、跨境运输等领域的应用,服务周边国家经济社会发展。随着北斗卫星导航系统第三阶段全球组网建设的推进,其应用服务必将对澜沧江-湄公河区域合作国家产生更深远的影响[2]。
2019年,在澜沧江-湄公河区域合作机制下,中国软件评测中心联合全图通位置网络有限公司,实施基于北斗高精度导航定位的智能交通应用示范项目,研制了高精度地基增强设备及系统,系统采用北斗、地理信息系统(GIS)、4G通信技术、计算机网络技术等技术手段,建立基于北斗地基增强的车辆和人员北斗高精度定位监控和可视化管理系统,满足国内外的车辆和人员北斗高精度定位需求。
2 系统组成及工作原理
系统分为中心服务子系统、全球导航卫星系统(GNSS)基准站子系统、车载终端子系统和人员终端子系统,系统的整体组成图如图1所示。
GNSS基准站子系统的天线安装在坐标已知点,GNSS基准站接收机接收卫星信号,并将生成的原始观测数据发送到中心服务子系统;中心服务子系统生成差分改正数,通过4G无线链路将GNSS差分改正数播发出去;车载终端子系统和人员终端子系统通过4G无线链路获取GNSS差分改正数,并与接收到的卫星信号进行差分计算,实现车辆和人员的高精度定位,将车辆和人员的位置信息发送至中心服务子系统;中心服务子系统接收车辆的实时位置、速度等信息,在二维GIS地图上直观显示,实现车辆的有效管理,如电子围栏等功能[3]。
2.1 中心服务子系统
中心服务子系统主要包括高精度定位软件和配套的计算机、UPS等设备。高精度定位软件接收GNSS基准站子系统发送的原始观测数据,生成差分改正数。同时,高精度定位软件与车载移动站子系统和人员定位子系统进行通讯,通过4G无线链路播发GNSS差分改正数,接收返回的高精度定位信息,在二维GIS地图上直观显示,实现车辆和人员的有效监控管理,如电子围栏管理等。
2.2 GNSS基准站子系统
GNSS基准站子系统接收卫星信号,并将生成的原始观测数据发送到中心服务子系统,GNSS基准站子系统包含GNSS接收机、GNSS天线、浪涌保护器、避雷针以及配套线缆和机箱等设备,如图2所示。基准站GNSS接收机支持BDS、GPS、GLONASS和GALILEO高精度板卡,提供毫米级载波相位观测值和后处理定位信息。主机系统稳定性强、网络管理功能强大、具有良好的人机交互、抗干扰能力强、稳定性高、功耗低、优秀的环境适应性,很好地满足了基准站长期无人值守的环境。适用于测绘、气象、地震、位移监测、科学研究和其他高精度测量定位的应用领域。GNSS测量型天线可接收BDS、GPS和GLONASS三大GNSS系统卫星信号。天线结构采用双重防水,防紫外线外壳设计,可广泛应用于智能驾驶、测量测绘、驾考驾培、精准农业、数字化机械作业等领域。
2.3 车载终端子系统
车载终端子系统主要实现车辆的高精度定位。车载终端通过4G无线链路获取GNSS差分改正数,并与自身接收到的卫星信号进行差分计算,实现车辆的高精度定位,将车辆位置信息发送至中心服务子系统。车载终端子系统包含车载GNSS接收机、GNSS天线、4G天线等组成部分。车载GNSS接收机是一款专用于车载的高精度GNSS接收机。该接收机采用了北斗RTK等多种差分定位技术,内置4G全网通通讯模块,支持差分数据接入及数据实时回传。
2.4 人员终端子系统
人员终端子系统主要实现人员的高精度定位。通过4G无线链路获取GNSS差分改正数,并与接收到的卫星信号进行差分计算,实现人员的高精度定位,将人员位置信息发送至中心服务子系统。人员终端子系统包含人员定位终端及辅助穿戴套件。人员定位终端是一款专用于人员监控的高精度GNSS接收机,采用北斗伪距差分等多种差分定位技术,内置4G全网通通讯模块,支持差分数据接入及数据实时回传。
3 关键技术
3.1 联合定位算法
联合定位算法主要是研究基于实时RTK的定位解算算法,针对车辆和行人的高精度轨迹跟踪,开展实时动态载波相位差分技术(RTK)+星际增强系统(SBAS)+无线传感器网络(WSN)的高精度无缝定位联合研究,使系统未来能够在基于超宽带(UWB)的技术环境下实现室内外一体化的无缝定位导航[4]。
系统利用的算法基础是一种空间的距离交会原理。在地面特定位置上安置的北斗/GPS接收机,同一时刻可以接收4颗以上卫星发射的信号。通过测定这4颗以上卫星在此瞬间的位置以及它们分别至该接收机的距离,据此利用距离交会法解算出测站P的位置及接收机钟差δt。
如图3所示,设时刻ti在测站点P用接收机同时测得P点至四颗卫星S1、S2、S3、S4的距离、、、,通过GPS电文解译出四颗GPS卫星的三维坐标,,用距离交会的方法求解P点的三维坐标的观测方程为:
式中的c为光速,δt为接收机钟差。
3.2 路径规划算法
路径规划算法主要是研究多判决标准的路径导航算法,针对城市环境下交通领域的智能化导航进行研究,引入交通路况信息作为搜索约束,瞄准城市路况智能导航问题场景,最终形成针对城市复杂路况环境下的多判决智能化导航算法。
假设路网中每一个节点都有标号(dt,pt),dt是从出发点s到点t的最短路径长度;pt表示从s到t的最短路径中t点的前一个点。求解从出发点s到点t的最短路径算法的基本过程如图4所示。
从图4算法步骤中可以看出,该路径最优算法的关键部分是从未标记的点中不断地找出距离源点距离最近的点,并把改点加入到标记的点集合中,同时更新未标记的点集合中其余点到起始点的最短估计距离。
在实际应用中,本路径规划算法以Dijkstra算法为基础,结合当地的实际情况,基础路径规划算法利用邻接矩阵算法和邻接节点算法开展设计,同时也作为后续算法扩展的基础。与普通的平面网络图相比,澜沧江-湄公河区域国家实际城市道路网络的拓扑图通常具有的特点是:多为大规模的稀疏网络,点多边少(网络的节点通常成千上万,甚至更多,而每个节点相连的路段一般不超过5,多为2、3或4);网络结构相对比较规则,即网中的节点分布比较均匀(特别是经过规划的现代大都市);网络通常是(或近似是)完全連通图,即网络中的任意两点都可以相互到达;网络中有表示供智能车辆掉头的换向节点,而且一般距当前路口500m左右。根据以上诸多特点,符合当地该区域内的限制搜索区域的路径规划算法有着更多的优势。
限制搜索区域的最短路径规划算法,有效地降低了算法的搜索空间,提高了算法的搜索效率。但是,限制搜索区域的路径规划算法只能解算出数学意义上的最短路径,还需要考虑很多算法预期或定量化的因素。在此基础上,需利用实际城市道路网络中路段的不同等级特性,构造不同于方向搜索策略的另一种启发式搜索策略,即分层搜索策略,设计基于分层道路网络的分层路径规划算法,这样即可保证路径规划的准确性,同时也提高了搜索效率。
3.3 高精度定位模块
高精度定位模块包括车载和人员两类。由于车载终端采用外部供电,且不受功耗、体积和重量等限制,因而主要关注的性能指标是定位精度,因此车载终端选择RTK定位模块,实现高精度定位,定位精度为亚米级,满足车道级导航的应用要求。人员定位终端需要内置电池,且需要轻便、不影响正常工作及工作的持续性,因此人员终端选择差分全球定位系统(DGPS)定位模块,同时由于人员自身姿态的变化较大,对定位的精度要求可适当放低,将定位精度设定为米级,满足人员监控的应用要求,并为未来的应用开发奠定基础。
4 测试结果
4.1功能测试
4.1.1电子围栏
通过将电子围栏系统跟相关移动设备进行绑定,从而可以确定移动设备和电子围栏的位置关系,包括移动设备进出围栏区域的时间、在围栏内区域停留的时长等。在本项目中,若装有定位系统的校车没有在规定的区域内行驶或者翻越电子围栏边界就会产生一系列的报警通知,平台会及时进行消息闪烁展示和进行警告声音的提醒。这时,管理者就能及时查看知晓相关车辆的动态,对其采取相应的处理措施,如图5所示。
4.1.2 实时轨迹
在地图上实时显示车辆和人员的位置,并且可以分别选择特定车辆和人员,打开实时轨迹窗口,在实时轨迹窗口可以显示车辆和人员的位置和移动信息,如图6所示。
4.1.3 轨迹回访
该系统可以全天侯监控所有被控车辆的实时位置,随时回放自定义时段车辆历史轨迹及行程记,如图7所示为车辆轨迹回访。
4.2 性能测试
4.2.1 车载终端单点定位精度测试
单点定位是利用单台设备实时观测量,不使用差分数据进行定位的方法。本系统的单点定位精度指的是水平的单点定位精度。其计算方法参照《北斗/全球卫星导航系统(GNSS)测量型OEM板性能要求及测试方法》[5],使用实际卫星信号测试,通过馈线将OEM板与天线连接在室外的基线检验场的观测点上,待OEM板得到定位结果后开始记录输出的坐标,数据采样间隔不大于30s,记录数据不少于100个,计算单点定位的水平定位精度,如图8和图9所示,设备实际位置与精确坐标的距离误差RMS值优于3m。
4.2.2 车载终端RTK定位精度测试
RTK定位精度测试使用差分数据进行定位。本系统的RTK定位精度指的是水平的定位精度。其计算方法参照《北斗/全球卫星导航系统(GNSS)测量型OEM板性能要求及测试方法》(BD 420002—2015),使用实际卫星信号测试,通过馈线将OEM板与天线连接在室外的基线检验场的观测点上,待OEM板得到定位结果后开始记录输出的坐标,数据采样间隔不大于30s,记录数据不少于100个,计算RTK定位的水平定位精度,如图10和图11所示,设备实际位置与精确坐标的距离误差RMS值优于5cm。
4.2.3 车载终端速度精度测试
车载终端速度精度测试参照《北斗/全球卫星导航系统(GNSS)测量型OEM板性能要求及测试方法》(BD 420002—2015),用GNSS模拟器模拟卫星导航信号和用户运动轨迹,输出射频仿真信号。被测OEM板接受射频仿真信号,按1Hz的更新率输出速度数据,以模拟器仿真的速度作为标准,计算速度误差及其分布,如图12所示,设备实际速度与高精度设备精度误差RMS值优于0.3m/s。
4.2.4 人员终端单点定位精度测试
人员终端单点定位精度测试数据处理方法与上述车载终端单点定位精度测试方法一致。使用实际卫星信号测试,通过馈线将OEM板与天线连接在室外的基线检验场的观测点上,待OEM板得到定位结果后开始记录输出的坐标,数据采样间隔不大于30s,记录数据不少于100个,计算人员终端单点定位的水平定位精度,如图13和图14所示,设备实际位置与精确坐标的距离误差RMS值优于3m。
4.2.5 人员终端伪距差分精度测试
人员终端伪距差分精度指的是水平的单点定位精度。伪距差分精度参照《北斗/全球卫星导航系统(GNSS)测量型OEM板性能要求及测试方法》(BD 420002—2015),使用实际卫星信号测试,在检验场地选取不大于50KM基线进行检验,有效的GNSS卫星数目不少于8颗,设置卫星截止高度角不大于10°,流动站OEM板在已知坐标的点位上进行观测,人工进行10组观测,每组采集不少于100个伪距差分测量结果,如图15和图16所示,设备实际位置与精确坐标的距离误差RMS值优于2m。
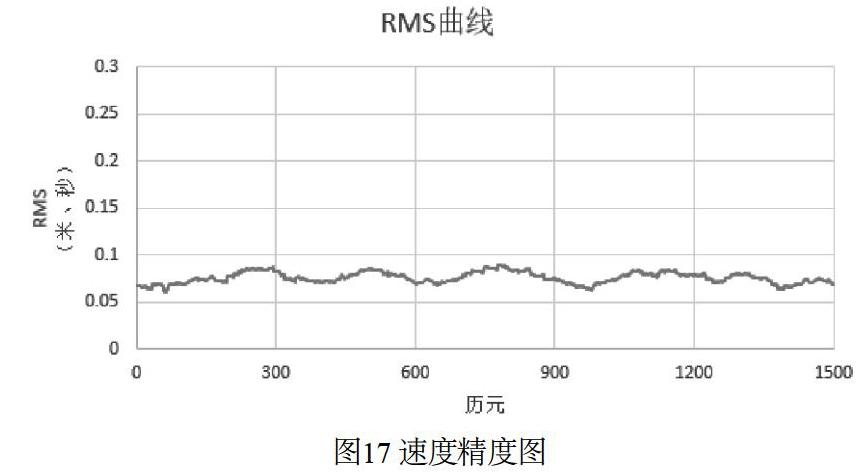
4.2.6 人员终端速度精度测试
人员终端速度精度测试数据处理方法与上述車载终端速度精度测试方法一致。用GNSS模拟器模拟卫星导航信号和用户运动轨迹,输出射频仿真信号。被测OEM板接受射频仿真信号,按1Hz的更新率输出速度数据,以模拟器仿真的速度作为标准,计算速度误差及其分布,如图17所示,设备实际速度与高精度设备精度误差RMS值优于0.3m/s。
5 结束语
本文介绍了基于北斗高精度导航定位的智能交通示范应用系统,包括系统组成及工作原理、关键技术,并在泰国开展实地测试,验证系统的功能指标与性能指标均满足国家标准及系统设计的要求。通过搭建此系统,建立北斗应用落地的演示平台,拓宽了北斗在澜湄国家及科研机构的合作渠道,为北斗卫星导航系统在国际合作中的应用推广起到重要的促进作用。
参考文献
[1] 施闯,赵齐乐,李敏,唐卫明,胡志刚,楼益栋,章红平,牛小骥,刘经南.北斗卫星导航系统的精密定轨与定位研究[J].中国科学:地球科学2012,6(42),854-861.
[2] 刘增军.北斗全球卫星导航系统高精度测量数据处理及应用[D].长沙:国防科学技术大学,2014.
[3] 李金龙.北斗/GPS多频实时精密定位理论与算法[D].郑州:解放军信息工程大学,2014.
[4] 汪商.智能交通系统中载波相位差分定位技术的研究[D].北京:北京交通大学,2012.
[5] BD 420002—2015 北斗/全球卫星导航系统(GNSS)测量型OEM板性能要求及测试方法[S].中国卫星导航系统管理办公室,2015.
