扫地机器人电机自动测试装置
2020-07-17陈敏生
陈敏生
开发设计
扫地机器人电机自动测试装置
陈敏生
(揭阳市汇宝昌电器有限公司,广东 揭阳 522000)
针对扫地机器人吸尘电机性能测试频繁切换进气阀门开度时,人工操作导致进气阀门开度控制不稳定,测试流程繁琐等问题,研制扫地机器人吸尘电机自动测试装置。利用LabVIEW软件平台编写测试软件,结合串行总线技术,实现进气阀门的数控切换,并自动记录测试溯源数据,生成测试报告。测试结果表明:该装置可对扫地机器人吸尘电机进行快速可靠的性能测试,具备测试自动化、可溯源的特点。
扫地机器人;吸尘电机;自动测试;可溯源
0 引言
扫地机器人吸尘电机是扫地机器人功能的核心组成部件,其需长期运转,要求性能稳定,以保障扫地机器人的正常清洁能力与工作寿命。为实现扫地机器人吸尘电机性能的自动测试,本文研制扫地机器人吸尘电机自动测试装置,对电机的性能参数进行测试,利用计算机作为测试控制单元,实现测试装置自动化、数字化;并结合数据库技术实现测试过程数据可溯源。
1 装置测试需求与总体框架
1.1 测试装置需求
扫地机器人吸尘电机的工作原理示意图如图1所示。吸尘电机安装在扫地机器人内部,通过电机带动扇叶转动产生负压并形成吸力,吸入的灰尘暂存于尘盒中,同时吸入的空气经尘盒过滤后排出扫地机器人,实现灰尘清扫。
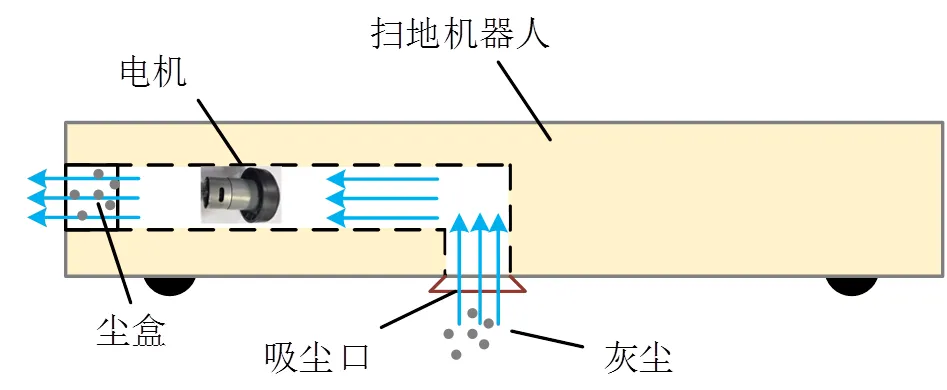
图1 吸尘电机工作原理示意图
GB/T 25441—2010《吸尘器电机》标准规定了吸尘器电机的相关测试项目与测试要求[1],并给出了基于均压箱的吸尘器电机性能测试方法。利用均压箱内形成的真空度、均压箱进风量和电机输入功率计算电机的输出功率及工作效率。基于均压箱的性能测试装置结构图如图2所示。
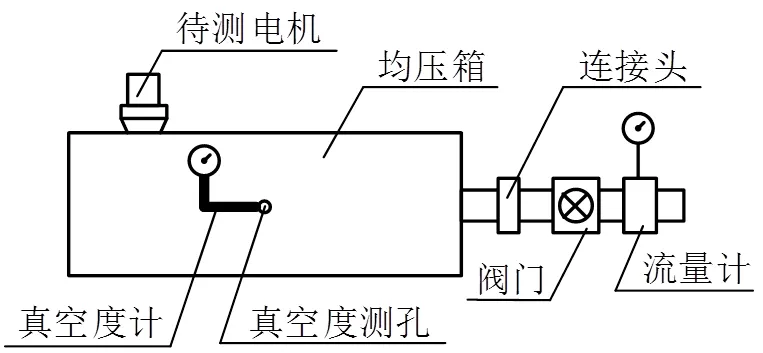
图2 基于均压箱的性能测试装置结构图[1]
根据测试标准,测试吸尘器电机性能时,主要测试电机的电压、电流、真空度、吸入功率和工作效率。测试需要模拟不同的进气条件,需频繁切换进气阀门开度,并按规定时间间隔采集传感器数据。为此,本文研制的扫地机器人吸尘电机自动测试装置需求为:1)自动化,自动控制进气阀门的开度,并按照规定时间间隔进行数据采集,减少人工切换阀门开度,实现自动化测试;2)数据可溯源,自动记录测试过程数据,形成溯源信息,测试完成后自动输出测试结果报表与性能曲线。
1.2 测试装置功能框架
根据测试需求,设计扫地机器人吸尘器电机自动测试装置的结构框架如图3所示,其由上位机、气体流量计、数字真空计、均压箱、数控阀门、待测电机及数控直流电源组成。其中,上位机装有测试软件及数据库,其作为测试装置的操作面板及数据处理中心,基于Modbus协议通过串行总线控制各测试设备(数控直流电源、数控阀门、气体流量计和数字真空计)。
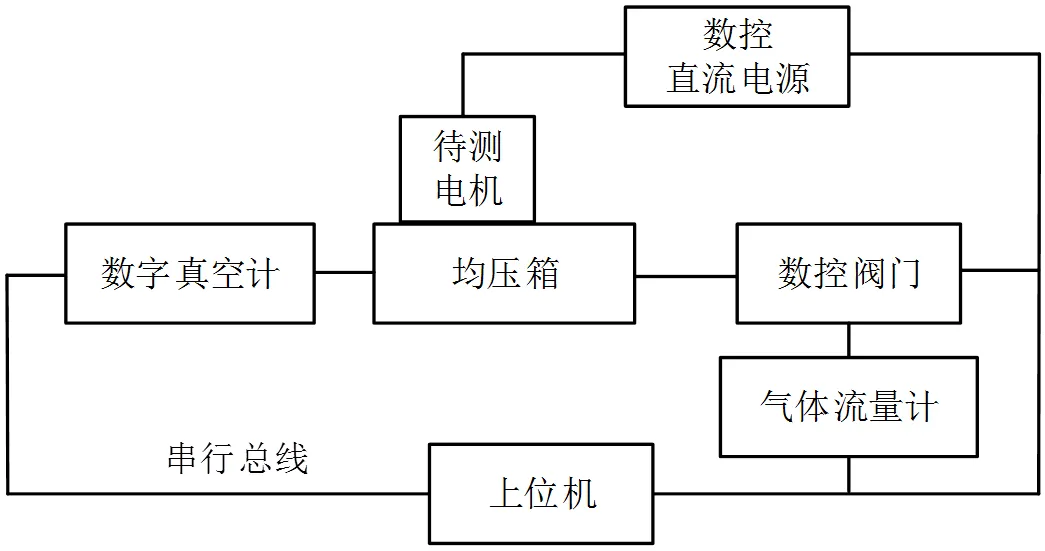
图3 扫地机器人吸尘器电机自动测试设备结构框架
Modbus协议是工业自动化控制系统中一种重要的通信协议,其构筑的硬件平台基于RS-485串行总线,在多种通用工控组态软件中广泛应用[2]。
数控直流电源通过串行总线设置或读取当前输出电流、电压和功率;数控阀门根据进气阀门的数模转换卡输出的直流电流信号值改变阀门开关情况,进而改变均压箱进气条件,模拟吸尘器电机工作工况;气体流量计采集均压箱进气管道的实时空气流量,并通过串行总线上传至上位机;数字真空计采集均压箱内的真空度,并通过串行总线上传至上位机。
根据标准设计的均压箱示意图如图4所示。箱体设置了3个开孔:1)被测电机插入孔,用于安放被测电机;2)真空度测定孔,用于安放真空度计;3)流量计插入孔,用于连接流量计,测量均压箱的吸入风量。
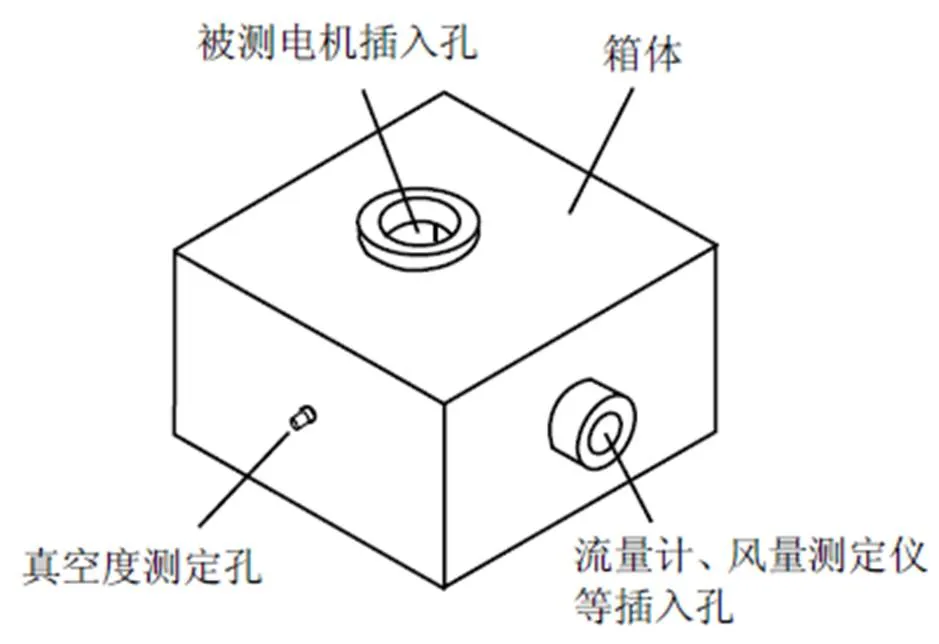
图4 均压箱示意图
测试时,首先,上位机通过串行总线设置测试电机所需的电压、电流;然后,待测电机通电,均压箱内部因电机抽风而形成负压,上位机轮询不同站号的测试设备并获取当前测试数据;最后,完成一个点位的数据采集后,上位机控制数控阀门切换进气阀门开度,测试不同进气条件下吸尘器电机的效率。
为同时连接多种测试设备进行信号传输,设计基于串行总线的数据通信方案,实现测试数据的实时采集与记录。上位机按Modbus协议发送不同的通信报文至串行总线,挂载在串行总线的测试设备根据报文的站号数据位,确定通信对象是否为本设备:若是则执行报文要求的操作,并返回相应的数据;否则忽略本次报文,不作任何处理。上位机接收到返回数据后进行循环冗余码校验,确定返回信息无误后进行数据解析,获取测试数据。
2 测试软件设计
2.1 测试软件功能结构
扫地机器人吸尘器电机自动测试装置测试软件基于LabVIEW软件平台开发,搭配NI-VISA串行通信组件,实现上位机软件与连接至串行总线的设备通讯。LabVIEW软件平台是NI公司推出的图形化编程平台,具有开发简便、界面设计快速的特点,被广泛应用于虚拟仪器软件的开发[4-5]。测试软件功能结构如图5所示。
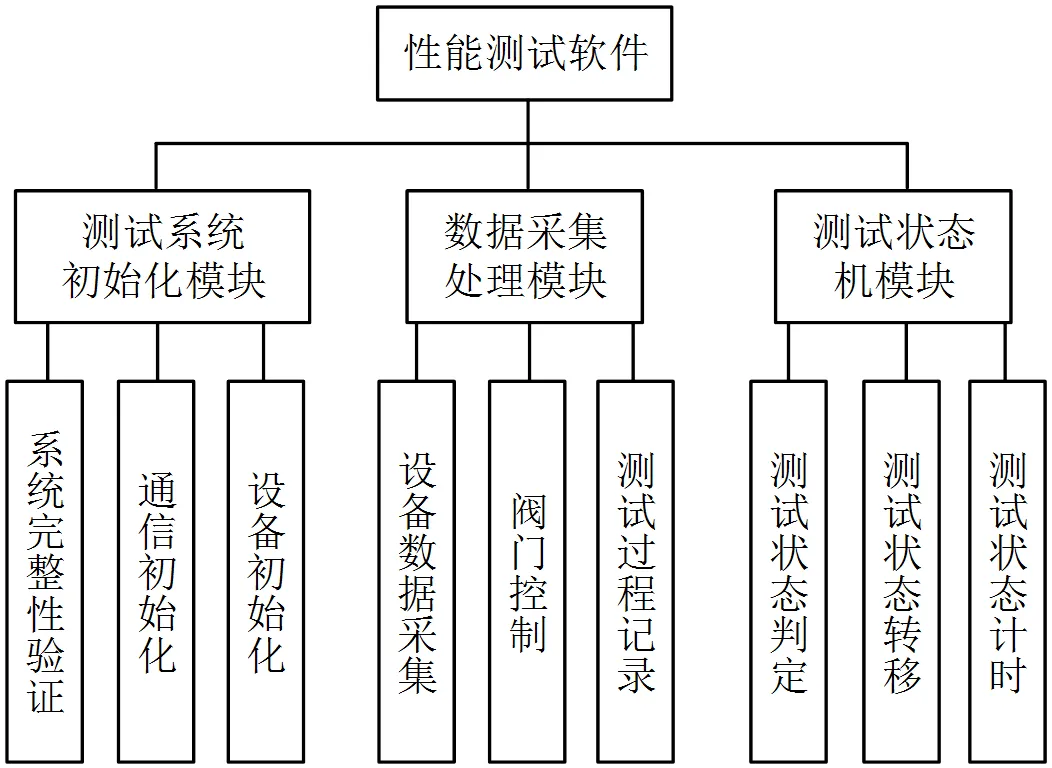
图5 测试软件功能结构
扫地机器人吸尘器电机自动测试装置测试软件包括测试系统初始化模块、数据采集处理模块和测试状态机模块,各模块相互协作,完成吸尘器电机测试功能。
测试系统初始化模块负责初始化测试设备,建立上位机与测试设备之间及上位机程序与数据库之间的通信,检查测试设备的完整性。
数据采集处理模块用于测试数据的采集、解析及存储。数据采集处理模块控制程序通过串行总线轮询发送控制指令至测试设备,采集并解析测试设备返回的信息,并形成测试溯源信息,存储于测试系统数据库。测试软件数据库采用MYSQL开发,并配合Navicat软件进行管理。MYSQL数据库是多线程、多用户的关系型数据库,具有查询快速、占用空间小的特点[3]。测试过程中自动调整进气阀门开度,模拟不同的测试工况。测试完成后自动生成测试结果报表,输出到指定位置的excel文件中。
由于测试系统涉及多个系统状态转移,为方便程序管理与定时同步,设计测试状态机模块。其中,自动测试模式共有6种状态(测试系统初始化、等待测试开始、系统热机、等待读数稳定、等待进气阀门开度切换、结束测试);寿命测试模式共有5种状态(等待测试开始、电机运转、电机休息、测试暂停、测试结束)。测试状态机各个状态根据测试程序预设的状态转移条件进行转移,实现测试流程的自动化定时控制。
测试软件主界面如图6所示,共设置3个主要模式,分别为自动测试模式、手动测试模式与寿命测试模式。
自动测试模式按照GB/T 25441—2010《吸尘器电机》标准中规定的测试流程自动进行测试,采集11个不同进气阀门开度条件下电机性能点位,并绘制性能曲线。手动测试模式设定测试所需的电压、电流及进气阀门开度,模拟特定工况下吸尘器电机的工作条件进行测试。寿命测试模式按要求设定寿命测试所需工况,设置电机运行与休息时间、寿命测试结束的电压下限;当待测电机电流值低于一定阈值时,认定该电机已损坏,结束寿命测试,并显示当前电机寿命。
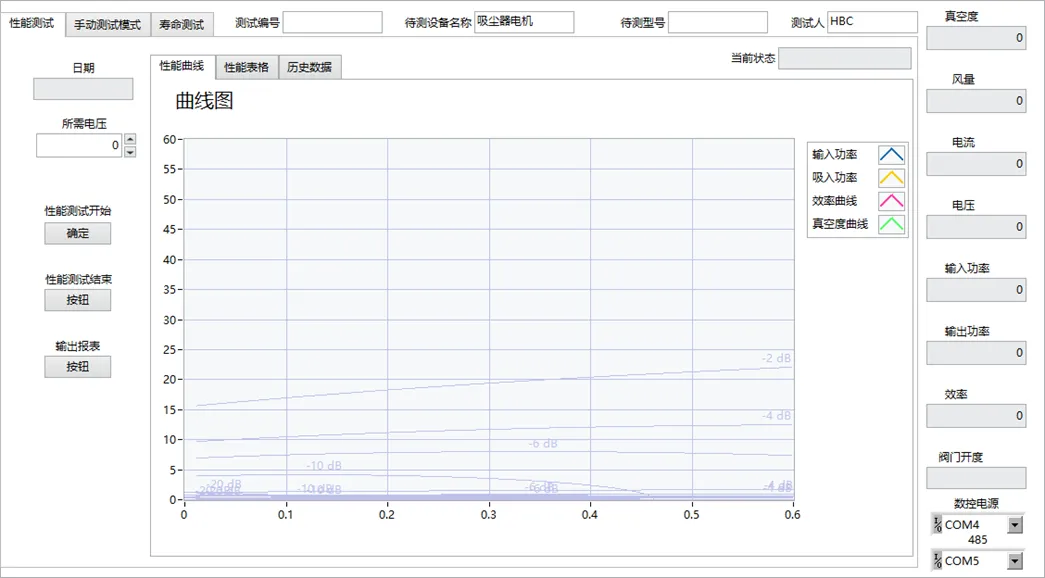
图6 测试软件主界面
2.2 测试流程设计
自动测试模式测试流程如图7所示,测试流程为:1)自动测试初始化,设置测试所需电压、电流,设置进气阀门开度为最大值,接通电源;2)测试系统热机3 min;3)等待1 min后采集传感器数据,采集完成后调整进气阀门开度;4) 11组数据采集完毕则将进气阀门调整至最大开度,结束测试,若未完成采集则返回第3)步;5)测试结束,清理过程变量,对测试结果进行修改并输出测试结果报表。
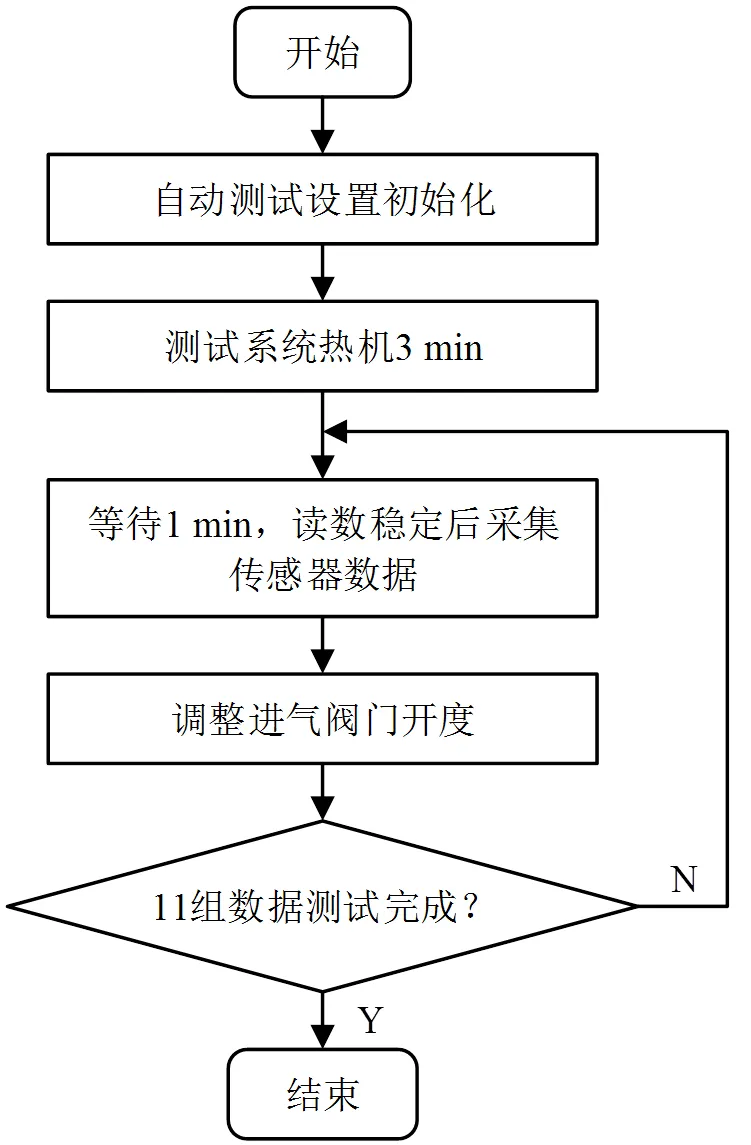
图7 自动测试模式测试流程图
寿命测试模式测试流程图如图8所示,测试流程为:1)测试系统初始化,设置测试所需电压、电流、进气阀门开度、电机运行时长、电机休息时长、电机损坏电流下限;2)按照电机运行时长、休息时长的设定进行自动测试并计时;3)当电流值低于下限值时,停止测试,记录当前寿命测试时长。
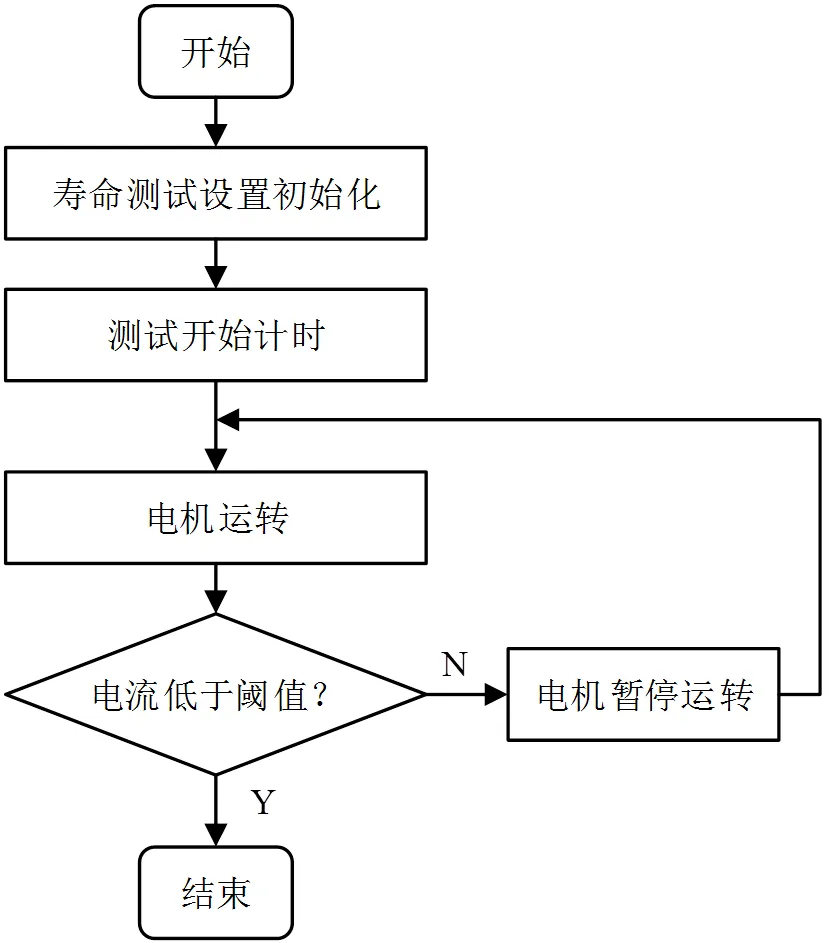
图8 寿命测试模式测试流程图
3 测试效果与分析
扫地机器人吸尘电机自动测试装置实物图如图9所示,被测电机安装在均压箱顶部出风口处,被测电机采用数控电源供电,测试系统由上位机进行控制与数据采集。
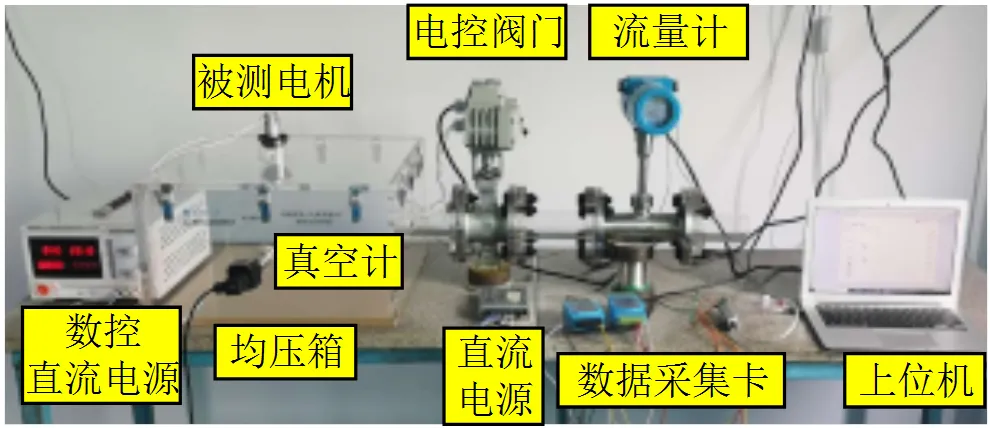
图9 扫地机器人吸尘电机自动测试装置实物图
使用该测试装置对额定电压为8.4 V,额定输入功率为60 W的吸尘器电机进行测试。测试设备按照GB/T 25441—2010《吸尘器电机》规定的测试流程自动进行性能测试。测试系统对测试过程中的11个工况点位的数据进行记录,并分析结果,性能测试表如表1所示。
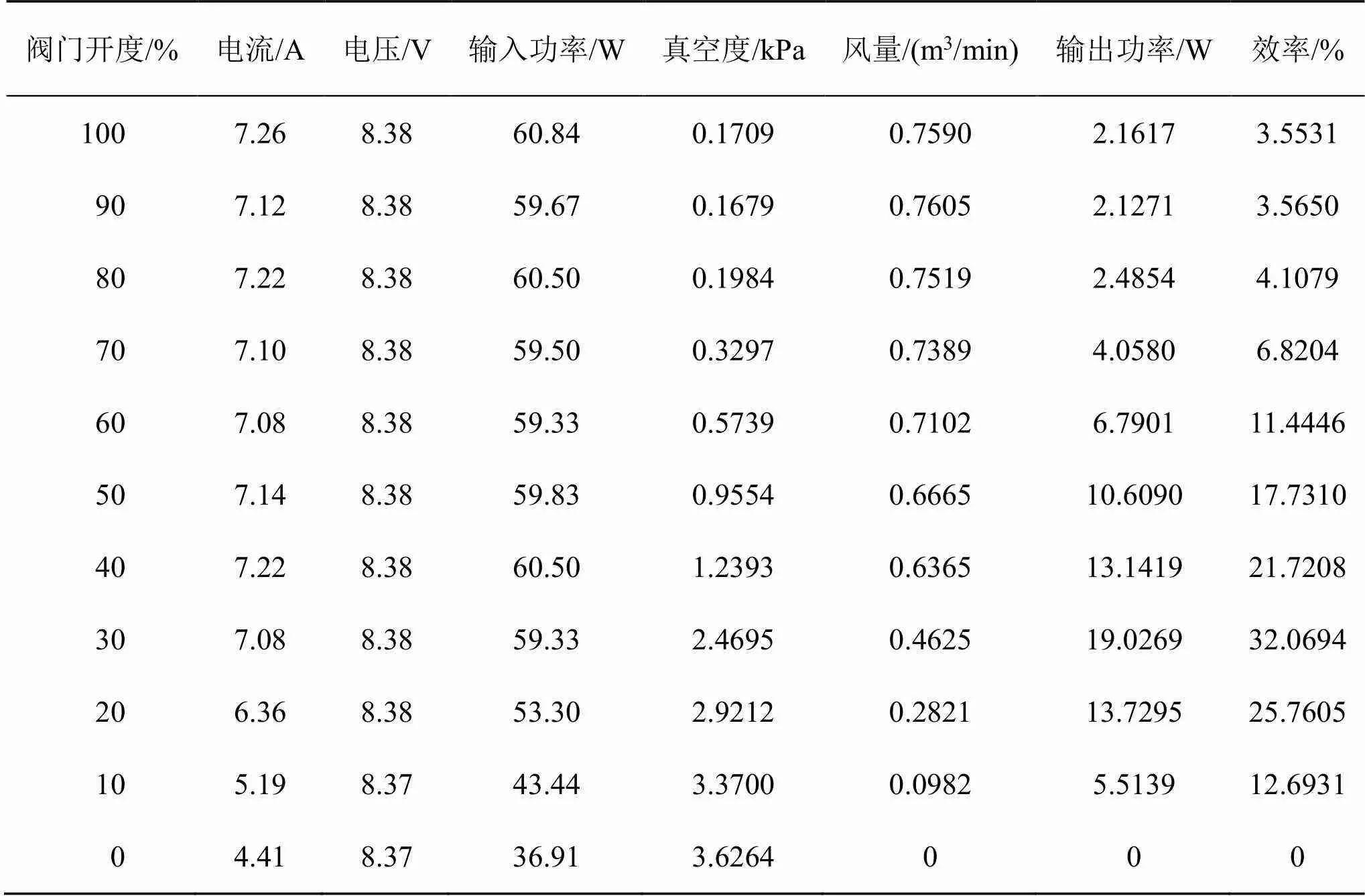
表1 8.4 V额定电压电机性能测试表
测试结果表明:待测电机在进气阀门开度为30%时,工作效率最高,达32.0694%;该工况下的输入功率为59.33 W,测试电机的性能符合标准规定的最大工作效率需大于30%的要求。
实际测试中,该测试装置能按照给定的测试流程,对扫地机器人吸尘器电机性能进行自动测试,并自动生成测试结果,形成测试溯源信息。该测试装置实现机器代人,全面提升测试效率与自动化水平,实现测试过程的可溯源。
4 结论
1)针对扫地机器人吸尘器电机性能测试需要定时切换均压箱进风条件,操作繁琐的问题,提出基于数控阀门的自动阀门切换技术,利用上位机软件定时切换阀门开度,实现机器代人,提升测试效率。
2)研发基于LabVIEW平台的测试软件,实现自动化测试、溯源信息自动生成并保存,兼容多种功率吸尘器电机测试,通用性良好。
以后将继续提高测试装置的自动化智能化水平,继续推进企业的自动化智能化改造。
[1] 中华人民共和国国家质量监督检验检疫总局,中国国家标准化管理委员会.GB/T 25441—2010 吸尘器电机[S].北京: 中国质检出版社,2010.
[2] 朱小襄.ModBus通信协议及编程[J].电子工程师,2005(7):42-44,55.
[3] 李荣国,王见.MySQL数据库在自动测试系统中的应用[J].计算机应用,2011,31(S2):169-171,175.
[4] 赵磊,柏澜.基于虚拟仪器技术的综合测试系统研究[J].自动化与仪器仪表,2018(6):64-67.
[5] 孟武胜,朱剑波,黄鸿,等.基于LabVIEW数据采集系统的设计[J].电子测量技术,2008(11):63-65.
为实现投稿采编流程的自动化及网络化,提高编辑部的审稿效率和质量,经过前期对“腾云期刊协同采编系统(知网版)”的试用、调整与完善,采编系统已于2020年3月20日正式面向作者、编辑部、审稿专家三方开通,欢迎使用。采编系统网址http://gzxg.cbpt.cnki.net。
自动化与信息工程编辑部
Automatic Test Equipment for Vacuum Motor of Sweeping Robot
Chen Minsheng
(Jieyang Huibaochang Electric Appliance Co., Ltd. Jieyang 522000, China)
In order to solve the problems of frequent switching of the opening of the air intake valve in the performance test of the vacuum motor of the sweeping robot, which is difficult to control and tedious to test under the condition of manual operation, an automatic test equipment for the vacuum motor of the sweeping robot is proposed. The test software is compiled on the LabVIEW software platform, and the numerical control switching of the air intake valve is realized by combining the serial bus technology, and it is recorded automatically Record test traceability data and generate test report. The practice shows that the device has the characteristics of automation, rapidity and traceability. It can test the performance of the vacuum motor of the sweeping robot reliably and quickly, and has important reference value.
sweeping robot; vacuum motor; automatic test; traceable
TP23
A
1674-2605(2020)03-0006-05
10.3969/j.issn.1674-2605.2020.03.006
陈敏生,男,1979年生,大专,主要研究方向:微电机制造与装备技术。
