放置在公共场所的可翻盖和及时清理的智能垃圾桶设计
2020-07-14梅吟松王雯雯陆庆文王涛
梅吟松 王雯雯 陆庆文 王涛
摘 要:我们设计的智能垃圾回收系统由监控端和智能垃圾桶所组成。其主要由以下几个基本部分构成,分别为AD模块、红外感应模块、语音模块、超声波测距模块、电机驱动模块、LCD显示模块以及GPS模块,以TM32单片机作为基础载体通过编程来实现各个模块之间的相互配合,将各个模块相互联系实现其自动开关盖,自动检测垃圾溢满程度,自动上传数据。并对其各个模块基本原理进行了介绍。
关键词:智能垃圾桶 红外感应 超声波测距 溢满检测
垃圾桶带来了很多的便利,但在生活中我们进程看见垃圾桶旁边堆满了垃圾。因为溢满垃圾桶不能及时被清理。城市现在所采用的清洁模式耗费大量的人力以及物力,但同时又尚未能解决以上问题,需要引入新的模式解决垃圾回收问题。
1 系统的功能分析
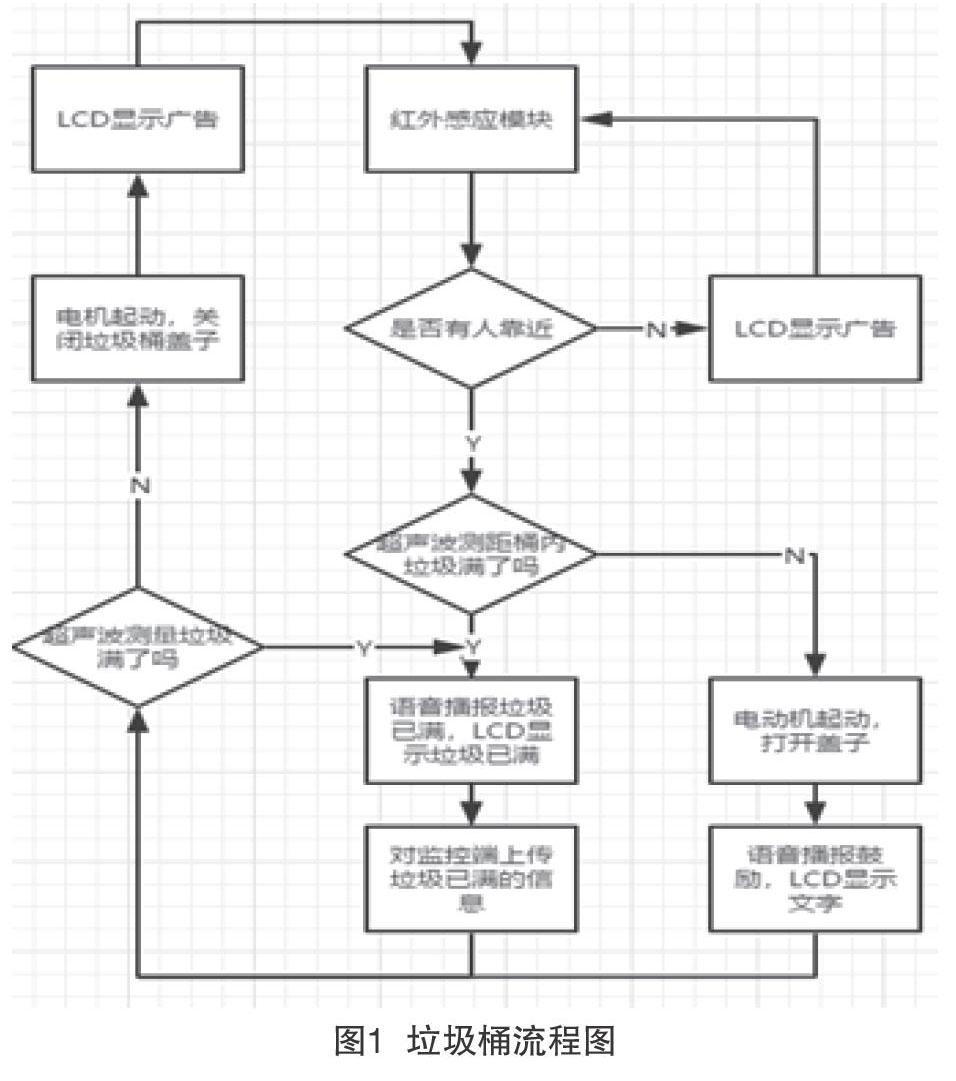
自动开关盖:当人在经红外感应模块检在拟定距离内红外感应模块会自动产生有效信号,传递给主控模块传给电机驱动模块,电机驱动模块控制电动推杆使开盖,开盖后拟定距离内无人电动推杆使垃圾桶盖闭合。溢满时,不打开。
语音播报:开盖同时播放语音,处于溢满播放语音。
显示提示和广告:没人靠近显示器上显示广告,当人靠近主控模块控制显示模块更换显示信息提示投放,处于溢满提示不能投放。
检测溢满:超声波测距系统检测垃圾桶桶内垃圾的高度,若其到达已经预设的高度将信息传递给主控模块,同时控制电机驱动,播报显示溢满。
上传满溢:经过超声波测距系统的检测传递给主控块,再通过GPS模块上传给监控端。
流程图如图1所示。
2 系统的电路结构分析
为了达到驱动控制机械装置的要求,电路需要满足以下技术指标:(1)保证投垃圾者接近垃圾桶时盖子能够准时打开,不受路过人员影响,设定红外感应模块有效范围为0.5m;(2)连续感应时间达3s后开盖延迟10s后关盖;(3)桶内垃圾距离桶内超声波測距模块的临界距离为5cm。该智能垃圾桶内部电路采用STM32单片机构成主控电路,通过程序控制各部分运作。整体电路由单片机系统,AD模块,红外感应模块,超声波测距模块,语音模块(功放电路),电机驱动模块,电动推杆,LCD显示模块,WIFI模块组成。当投垃圾者进入感应区且延时3s后,红外模块会自动产生有效模拟信号送给AD采集模块转化为数字量给单片机STM32,然后单片机产生脉冲控制信号给电机驱动模块,最后电机驱动模块控制电动推杆,同时语音模块经由功放和喇叭播报提示音,延时等待10s后电机转动盖子合上。当超声波测距模块检测到垃圾高度设定值时,超声波测距模块产生信号经变送放大交给AD转换,在传给STM32进行语音报警,同时通过GPS模块发送给监控端。
(1)STM32单片机 采用是STM32f103单片机
(2)AD模块采用11通道的TLC2543提高数据采集的精度。
(3)红外感应模块采用GP2Y0A21YK0F基于三角测量原理。红外发射器发射红外光束,当遇到物体以后,光束会反射回来,反射回来的红外线被CCD检测器检测到以后,获得一个偏移值L,利用三角关系,在知道了发射角度a,偏移距L,中心矩X,以及滤镜的焦距f以后,传感器到物体的距离D通过几何关系计算。
(4)语音模块语音芯片WT588D-20SS,功放芯片TC8002D。
(5)超声波测距模块选用HC-SR04,采用IO口TRIG触发测距,给至少10μs的高电平信号。模块自动检测信号返回,通过IO口ECHO输出一个高电平持续的时间是超声波从发射到返回时间。测试距离=(高电平时间*声速(340m/s))/2。
(6)电机驱动模块电动推杆是理一讯LX600的直流电动直线伸缩杆,电机驱动使用H桥L298N。本垃圾桶使用直流推杆,其输入端可以与单片机直接相联IO口提供信号,控制电机正反转达到推杆伸缩。
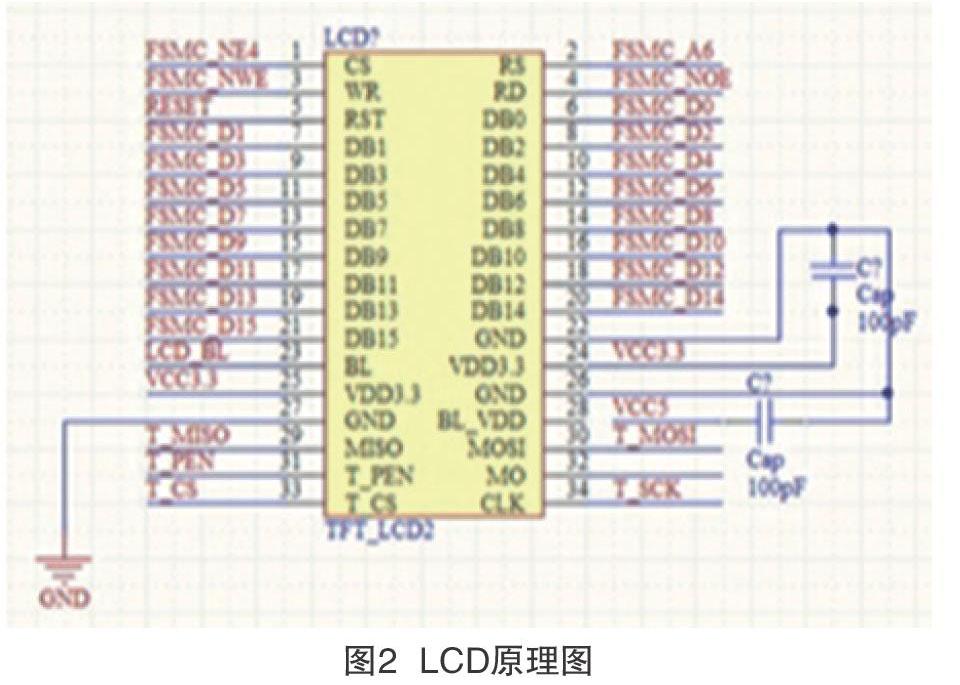
(7)LCD显示模块如图2所示。
(8)GPS模块垃圾桶使用的GPS模块为NEO-7M。
3 调试结果
按照上述组装智能垃圾桶,并进行验证通入电源, LCD屏幕显示广告,人在红外感应范围内,3s后垃圾桶自动开盖,并播报投放垃圾的提示语音,LCD显示屏内容变化为谢谢投放。开盖10s,人走后垃圾桶盖子自动关上,LCD显示屏内容切换为广告。若桶内垃圾达一定高度,显示内容切换为垃圾已满,盖子不开,监控端收到垃圾桶上传溢满信息。智能垃圾桶设计原理正确。现场调试测试验证了智能垃圾桶的各项功能。
参考文献
[1] 葛晓彤,陈西凝,孙涵,等.智能垃圾桶的设计[A].山东科技大学.2095-0748(2018)16-0038-02.
[2] 王丽,黎毓杰,叶泰杰,等.基于32位单片机控制的智能垃圾桶远程实施监控系统设计[A].华南理工大学.2095-509X(0217)06-0045-04.
[3] 徐蔡军,张莉萍,葛鸿翔,等.基于ARM的只能车位锁远程控制系统设计[A].上海工程技术大学.100-8829(2017)08-0059-03.
[4] 项馨仪,李宏,陈佳明,等.一种智能垃圾桶管理系统.中国.CN201310219088.1[P].20130904.佰腾网.
[5] 马丽,脸飞.一种基于物联网的智能垃圾桶.中国.CN201621445385.3[P].20161227.佰腾网.
