6G定位的潜力与挑战
2020-07-14赵军辉李一博王海明张英豪
赵军辉 李一博 王海明 张英豪
【摘 要】在部署5G网络的同时,6G技术进入了研究起步阶段。围绕6G与无线定位技术,首先从直接和间接定位的角度对定位技术进行总结,并分析5G定位增强以及存在的不足。然后提出面向6G定位技术展望,重点分析了太赫兹通信技术、SM-MIMO超大规模天线阵列、融合定位、人工智能等6G技术发展对定位技术的影响。最后分析了6G技术应用于无线定位存在的挑战。
【关键词】6G移动通信;定位技术;太赫兹;MIMO;人工智能;融合定位
0 引言
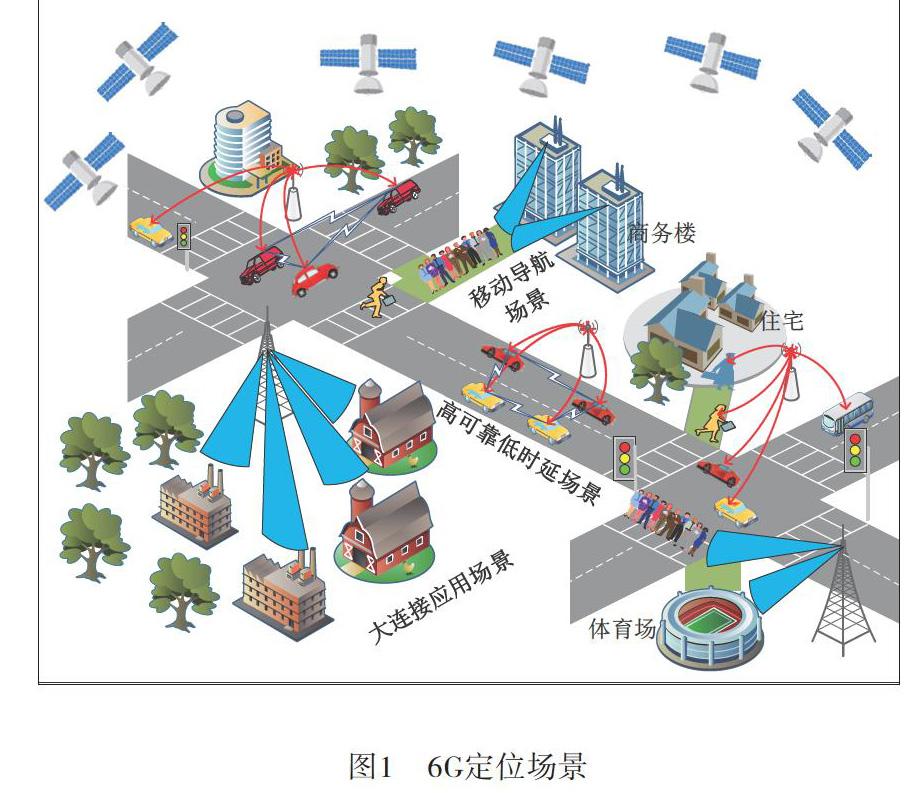
2019年9月初,欧洲发布6G白皮书《6G泛在无线智能的关键驱动因素及其研究挑战》。该白皮书提出未来6G愿景是实现泛在无线智能,并指出6G技术性能指标将比5G普遍提升10到100倍[1]。社会发展将带来大量新的技术场景[2],这些技术场景提出更高要求的LBS(Location Based Service,定位服务),如图1所示,而6G相关技术发展与演进将为定位技术性能的提高提供潜在的技术可行性。高可靠低时延场景,需要提供高实时性和可靠性的LBS,太赫兹通信技术和智能化融合协作网络将有助于提升低时延场景LBS性能;大连接应用场景,需要满足大量设备接入并摆脱不良节点信息干扰,超大规模天线阵列技术将为这类场景的定位问题提供解决方法;移动导航场景,需要为用户提供连续广域的场景覆盖、无缝稳定的室内外LBS,利用融合定位将多种定位技术平滑融合,这为移动场景定位提供思路。6G将在5G基础上,借助新技术进一步提供高性能的LBS,全面提升主要技术场景的用户体验,进而扩展和深化公众移动通信系统的范围和领域,实现万物智联,服务于智能化的社会[3]。本文从直接和间接定位的角度对定位技术进行总结,并分析5G定位增强以及存在的不足。然后提出面向6G的定位技术展望,重点分析了太赫兹通信技术、SM-MIMO超大规模天线阵列、融合定位、人工智能等技术发展对定位技术的影响。最后分析了6G技术应用于无线定位存在的挑战。
1 现有定位技术
1.1 基于公众移动通信基础设施的定位技术
基于公众移动通信基础设施的定位技术可以概括为两大类:间接定位技术和直接定位技术。
(1)间接定位技术
间接定位的基本原理是基于测距的方法,由基站侧LBS服务器综合计算测量结果,进而得出移动终端的位置[2]。测距方法中需测量的物理量常常需要借助空间中的直射径,测量的物理量包括TOA(Time Of Arrival,到达时间)、TDOA(Time Difference Of Arrival,到达时间差)、AOA(Angle Of Arrival,到达角)、FDOA(Frequency Difference Of Arrival,到达频率差)等。基于TOA/TDOA的定位技术,利用信号的到达时间或时间差计算目标所在位置,需要终端与基站或基站与基站间有较好的时间同步,且受多径时延效应影响大。基于AOA的定位技术,通过测量发射信号来波的角度实现位置估计,其对测向设备精度要求高且受角度分辨率影响大[4]。基于FDOA的定位技术,原理类似于TDOA,但需要设备与基站间存在相对运动,精度易受多径时延影响[5]。间接定位技术在实际场景运用较常见,但每种技术都受自身特征限制,定位精度极限值的提高存在瓶颈。
(2)直接定位技术
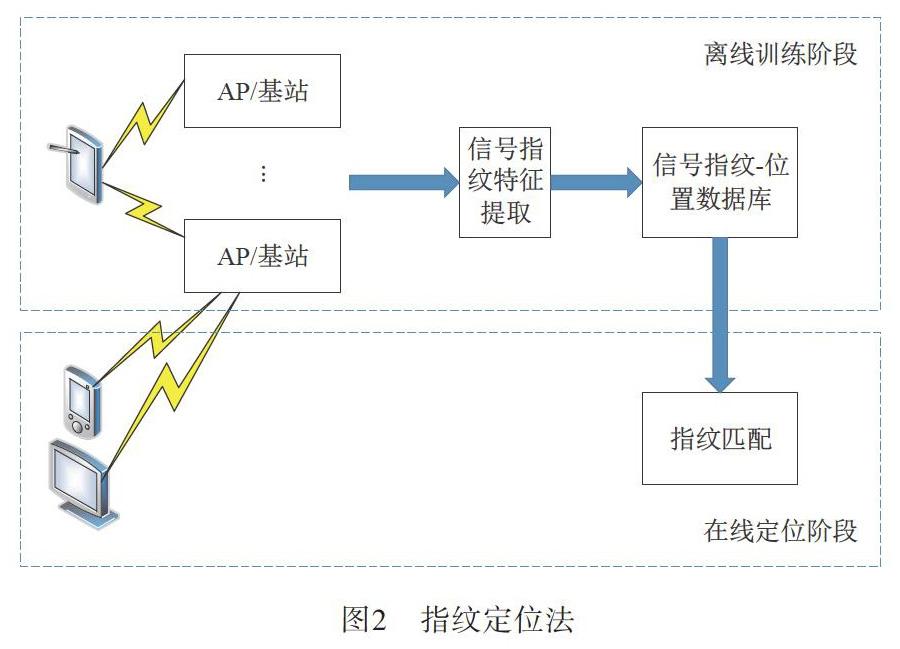
直接定位技术的基本原理是借助相关信息,建立位置的最大似然函数,并不断迭代估计位置。相关信息可包括信道状态信息、接收信号强度[6]、样本位置指纹[7]等。直接定位技术中最为普遍的是基于指纹的定位技术,通过匹配接收信号指纹与位置指纹数据库的信息,得出目标设备的位置。具体定位过程可分为离线训练和在线定位两个阶段,如图2所示。离线训练阶段主要完成信号指纹-位置数据库的构建,在线定位阶段主要进行指纹匹配判断目标设备位置。直接定位技术计算复杂,需要处理大量数据,但精确度远高于间接定位技术[8]。对于解决多主动式目标源的定位问题效果很好[9],因而近年来被认为是解决多基站场景下的定位问题的热门技术[10-11]。但是,直接定位技术精确度受信号指纹特征和匹配算法影响较大,如何构建信号指纹和处理指纹匹配是现阶段面临的挑战。
1.2 现有定位技术的特点与不足
(1)5G定位增强
基于公众移动通信基础设施的定位技术不断发展[12]。伴随着对定位性能要求的提高,5G定位技术不断增强。3GPP持续开展对定位技术的增强研究,相较于R14中定位参考信号结合CRS(Cell Reference Signal,小区参考信号)的定位方法,5G NR R15标准引入更多样化的参考信号CSI-RS。同时,继R14增强RAT(Radio Technology,无线电技术)定位方法后,在3GPP R15中应用了“无线接入技术无关”(RAT-independent)的定位方法,且在3GPP R16中还将继续研究“无线接入技术相关”(RAT-dependent)以及混合定位技术。此外,3GPP已公布5G NR R17研究计划将重点关注定位增强,进一步将室内定位精确度提升到厘米级。关于5G将实现的具体定位精度指标,NGMN联盟在其关于5G增强型服务的白皮书中指出,定位精度应在80%的概率下达到10 m,而在室内组网中定位精度应达到1 m。另外,在R17讨论区收集了包含V2X(Vehicle to Everything)定位、3D定位、校園定位、工厂定位等的潜在方向议题,这些研究将会为V2X等物联网应用提供3D厘米级的LBS。
在IEEE 802.11az NGP(Next Generation Positioning,下一代定位)功能要求文件中关于系统性能指出,可支持通过单独或结合的测量方法实现2.4 GHz和5 GHz频带中的AOA测量;对于60 GHz频带,采用添加其他ROLL(旋转角度)、分别为T1T3和T2T4定义TOD和TOA、使用单链路距离和角度测量的方法,以减少漂移对测距计算的影响。从而实现在60 GHz频带内以1 cm的精度进行距离测量、以10 ms的延迟进行距离或角度测量、在同一信道中可同时测量12个用户和7个AP(Access Point,无线接入点)的定位能力。
(2)定位技术的挑战
面向5G的定位技术不断增强,进一步提高定位的精确度。但是,由于相关技术的限制,面向5G定位技术仍存在许多有待解决的问题[13]。
1)泛在化问题:针对室外复杂场景[14]、室内外衔接场景、室内异构设备场景,融合不同定位技术是普遍方案,但目前尚未做到各场景泛在化。
2)覆盖问题:无法提供大范围和稳定连续的无缝覆盖。
3)精度问题:定位精度受环境影响大,难以提供质量一致的LBS。在复杂环境下,NLOS(Non-Line of Sight,非直射)和多径传播会引入测量结果误差[15],这将大大影响基于距离、频率等定位技术的精度[16]。此外,异构设备的定位精度也受到时间同步的严重影响[17],定位精度的提升存在瓶颈。
2 6G定位技术展望
目前,全球学者对6G特征描述多样,未来6G技术发展将可能涉及但不限于如下4个较重要的技术领域:太赫兹通信、超大规模天线阵列、星地融合与覆盖扩展、人工智能[18]。接下来我们首先分析6G中可能有利于定位的技术,然后提出6G定位技术存在的挑战。
2.1 6G定位技术的潜力
(1)太赫兹通信技术
角度是定位技術中的关键特征信息。太赫兹信号波长短、波束窄、方向性好[19]。一方面,利用太赫兹信号良好的方向性,可以实现更高精度的测距和测角;另一方面,太赫兹信号采用波束赋形,结合大规模天线技术(MIMO),能够得到更高分辨率的波束,从而接收机能够获得更佳的角度分辨率,大大提升基于角度测量(例如AOA技术)的定位精度。
NLOS和多径时延扩展是制约精确定位的重要问题。在森林、峡谷、城市等区域内,受树冠或建筑物的遮挡与多次反射,信号有效数据丢失,强度变弱,导致观测噪声扩大。随着6G移动通信载频升高,信号带宽将从5G的100 MHz增加至500 MHz[18]。太赫兹信号所具有的高带宽特性,使得其多径时延分辨率可与UWB(Ultra-Wide Band,超宽带)定位技术相当[20]。在频域上,更高的信号带宽更容易观测出因多径信号造成的频率选择性衰落;在时域上,更高的信号带宽也可提高接收机对多径信号的分辨率。同时,太赫兹频段的电波二次反射相对较弱[21],易于多径时延扩展问题的解决。这将有助于提高基于时间(TOA/TDOA)、频差以及RSS等定位技术的精度。此外,太赫兹信号穿透性能好,抗干扰能力强,利于定位精度提升[22]。
高可靠低时延场景,例如,智慧交通车辆定位、移动机器人等需要进行位置控制、轨迹跟踪功能的强实时性控制系统,对定位系统的时延有着很高的要求。太赫兹通信技术的峰值数据传输速率将超过1 Tb/s,经验数据速率将实现1 Gb/s,可满足极高的数据传输速率[23],从而实现高实时性和可靠性LBS的要求。
(2)超大规模天线阵列技术
大连接应用场景,例如工业物联网中,智能工厂存在室内资产追踪、AGV追踪等应用场景。在这些场景中,定位区域内存在大量定位设备接入,且需要厘米级室内定位精度,并摆脱不良节点信息干扰,同时对定位的实时性和可用性有要求。6G移动通信将使用多天线空间调制技术(SM-MIMO)[18],MIMO技术可通过增加天线数量,构造多天线阵列,补偿高频路径的传输损耗;空间复用技术能在MIMO多天线的阵列配置下,提高传输数据量。SM-MIMO使得6G移动通信基站可同时接入上千个无线外部连接,容量将达到5G的1 000倍[18]。这将为工厂定位环境下,大量定位设备接入提供可能。同时,通过空间复用技术,可在不占用额外带宽和不消耗额外功率的情况下增加信道容量,使得工厂设备定位的实时性和可用性得到保障。
MIMO技术构造的多天线阵列,天线数越多发射波束宽度越窄。在未来6G时代,基站侧天线阵元数将达到10 000个[21],加之太赫兹信号良好的方向性,角度分辨率可得到进一步提升。这使得各定位终端和不同波形之间干扰很小,结合波束赋形技术,可以实现对信号进行焦点式覆盖,从而提高定位精确度。同时,大规模天线阵列可提供丰富的信号特征维度,便于构造多特征的位置指纹信息,有利于多天线信道特征的指纹识别技术定位精度提升。使用超大规模天线阵列可以对到达信号进行更加精准地估计,有助于提升多径分辨率,从而提高基于时间和接收信号强度的定位精度,厘米级精确定位是可以预期的。另外,借用MIMO优势,大大提高定位的覆盖距离,降低定位系统对网络密度的要求。
(3)融合定位
移动导航场景,需要为用户提供连续广域的场景覆盖、无缝稳定的室内外高精度定位服务。除了利用6G技术提升基础定位技术的定位精度外,另外可考虑的方面是借助融合定位方法。融合定位通过利用网络中多个基站或者不同网络间信息采集和定位结果分享,对目标位置进行估计。由于6G网络是由多种网络构成的异构网络,能够为多种定位方法平滑融合提供强有力的支撑。
1)多基站的融合定位:利用传统定位技术(直接定位和间接定位)定位结果的基础上进行数据融合。6G创新型网络架构为精确定位的实施提供便利条件,分布式MIMO、C-RAN、以及无蜂窝构架等技术将基站间的联合协作处理便捷化。通过将多个接入点定位结果融合,可解决用户与基站时间存在偏差以及基站间存在同步误差的难题[24]。此外,利用定位目标设备与接入点的连接信息进行定位时[25],网络接入点密度与定位精度直接相关,多基站融合定位将提升定位精度。
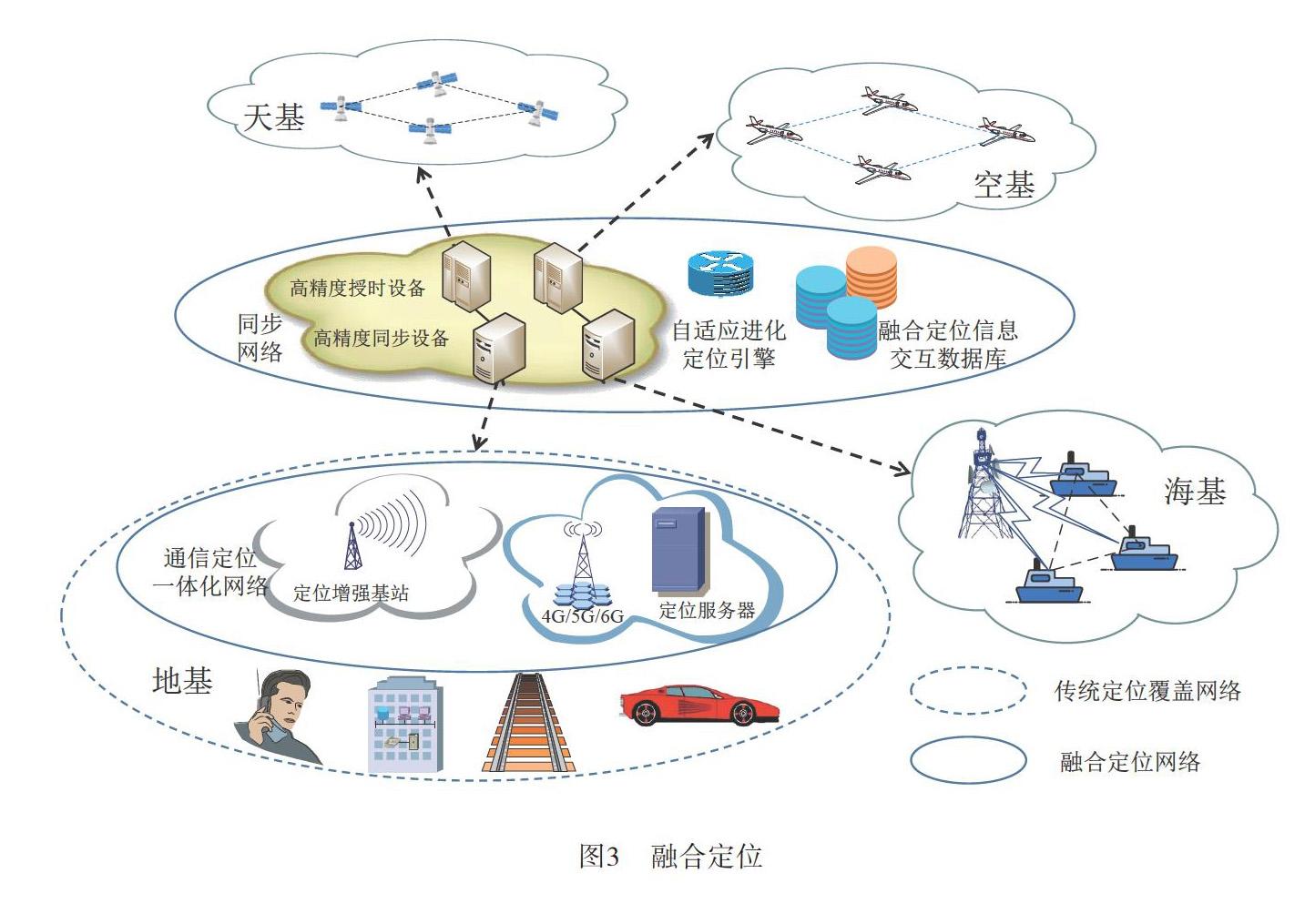
2)不同网络融合定位:利用通信网络、卫星网络等不同网络融合定位。一方面,解决广域覆盖问题。6G空天海地一体化网络,在传统地面蜂窝网络的基础上,分别与卫星通信(非陆地通信)和深海远洋通信(水下通信)深度融合,实现全地形、全空间立体覆盖连接。为各类用户LBS提供可用的信息基础设施保障,实现连续广域的场景覆盖,从而为远洋物资跟踪、大面积物联网设备位置信息采集提供解决方案。另一方面,解决传统定位方法泛在化问题。网络间的融合将不局限于将位置相关信息(时间、距离等)浅层次融合,而采用以定位为目标的网络间融合架构,将通信网络、卫星网络等混合架构、多层次融合。借助6G通信网络异构性,如图3所示,考虑每种定位技术自身的优缺点及适用范围,融合各种不同异构定位技术。通过异构网络之间、不同测量信息、不同定位方法的融合定位,实现通信和定位一体化。
(4)人工智能
AI與定位技术结合有两方面的应用。首先,AI可以用于数据处理分析,进而有助于直接定位法定位精度提高。AI从用户、环境和网络获取数据集学习,预测出定位信息。例如,获取视觉现实(VR)、建筑地图、声音等可用信息,综合空天海地网络收集信息进行多源信息处理,预测定位结果。相较于传统定位方法采用信号往返时间、信号到达时间差、到达角度等单一信息,与AI相结合的定位算法将提高3D定位精度。其次,可以在网络边缘及各网元实体(如基站和终端用户设备)内嵌AI实现网络自组织。实现基站设备间智能协作,使得精准定位实施更加便利。同时,AI可以学习环境,随着环境变化采用不同的定位方法,充分利用各定位方法在不同环境的优势,使得设备自主决策定位方法成为可能,实现定位智能化,进而实现LBS泛在化要求。
2.2 面临的挑战
6G技术为定位性能的提升带来了许多机遇,但也面临着一些关键挑战。
太赫兹通信技术应用于定位,需要研发可充分利用太赫兹频段可用带宽的收发机架构。另外,目前太赫兹器件成熟度不高。现有的固态太赫兹功率放大器的输出功率无法满足大覆盖需求,太赫兹相控阵天线也尚未突破,基于射频模块的太赫兹通信系统小型化程度不够,无法满足地面移动应用场景的要求[26]。
大规模天线阵列技术应用于6G场景中,还需解决天线方面跨频段、高效率、全空域覆盖等问题。同时,大规模天线阵列相关的技术也有待发展,例如,高性能大规模模拟波束成型网络设计技术。大规模天线阵列应用也依赖于高集成度射频电路优化,需要突破射频电路面临的低功耗、低噪声、非线性等多项关键性挑战[27]。
融合定位方法中,运用空天海地一体化网络有助于提升定位性能,但是天地一体化网络,尤其是天基网络受空间传播环境等因素的影响,其稳定性低于传统地面移动通信网络[28]。另外,要想充分发挥融合定位优势,还需要解决网络架构、接口标准、卫星系统与移动通信网络智能通信、频谱资源分配管理等问题。
现阶段,人工智能算法主要通过大量训练数据的离线方式进行参数优化。而训练样本主要采用数学方法仿真生成,这些样本忽略了部分实际通信环境带来的影响。另外,从算法角度,通信领域数据和其后隐藏的物理规律与计算机视觉面向的图像和视频数据差别非常大,现在人工智能框架强项是针对图像、视频、文本和语音数据,直接把这些框架拿来解决通信领域数据,匹配效果无法达到最优。
3 结束语
6G将实现万物智联,大量场景需要低成本、高精度、高可靠性的室内外定位服务系统。以太赫兹通信技术、SM-MIMO超大规模天线阵列、人工智能和融合一体化的网络架构等技术为代表的6G移动通信技术为解决当前定位难题提供了新的解决思路。本文介绍了5G定位方法并指出其有待解决的问题,然后通过分析面向6G的相关技术优势,提出了解决定位问题的思路,并说明相关技术发展与演进将为定位性能提升提供潜在的技术可行性。基于上述有利条件,发展面向未来公众移动通信系统的高性能LBS有望成为未来6G研究的一个重要分支。
参考文献:
[1] 高芳,李梦薇. 芬兰奥卢大学发布白皮书初步提出6G愿景和挑战[J]. 科技中国, 2019(12): 94-97.
[2] 张平,陈昊. 面向5G的定位技术研究综述[J]. 北京邮电大学学报, 2018,41(5): 1-12.
[3] Z L, L Y C, N D. 6G Visions:Mobile Ultra-Broadband,Super Internet-of-Things,and Artificial Intelligence[J]. China Communications, 2019,16(8): 1-14.
[4] Z J, L J, N Y, et al. Location-Assisted Beam Alignment for Train-to-Train Communication in Urban Rail Transit System[J]. IEEE Access, 2019(7): 80133-80145.
[5] Z J, L L, G Y. Joint Navigation and Synchronization in LEO Dual-Satellite Geolocation Systems[C]//IEEE Vehicular Technology Conference(VTC2017-Spring). IEEE, 2017: 1-5.
[6] Z J, R J, Y H, et al. Combined Linear Regression and Simplex Method for Signal Strength Based Indoor Position[C]//International Conference on Wireless Communications IEEE. IEEE, 2008: 1-4.
[7] Z J, Z H, R R. Distribution Localization Estimation Algorithm in Wireless Sensor Networking[C]//IEEE Vehicular Technology Conference 2015. IEEE, 2015.
[8] A A, W M. Direct Localization by Partly Calibrated Arrays: A Relaxed Maximum Likelihood Solution[C]//2019 27th European Signal Processing Conference (EUSIPCO). IEEE, 2019: 1-5.
[9] 马贤同,罗景青,孟祥豪. 多目标位置信息场直接定位法
[J]. 信息与控制,2015,44(6): 673-677.
[10] L G, L A, L L, et al. Sparse Bayesian Inference Based Direct Localization for Massive MIMO[C]//2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall). IEEE, 2019: 1-5.
[11] G N, W H, L E G, et al. Direct Localization for Massive MIMO[J]. IEEE Transactions on Signal Processing, 2017,65(10): 2475-2487.
[12] L Y, S X, H S, et al. Prospective Positioning Architecture and Technologies in 5G Networks[J]. IEEE Network, 2017,31(6): 115-121.
[13] 陳诗军,王慧强,陈大伟. 新一代无线定位技术研究与发展趋势分析[J]. 中兴通讯技术, 2018,24(2): 54-58.
[14] Y T, Z J, G Y. UAV-aided localization algorithm with relay for train-mounted mobile terminals[J]. Physical Communication, 2019(34): 227-234.
[15] Z J, Z H, R R. Distance Geometry-based Wireless Location Algorithms in Cellular Networks with NLOS Errors[J]. KSII Trans. Internet and Information Systems (TIIS), 2015,9(6): 2132-2143.
[16] Z J, L L, Z H, et al. Signal Path Reckoning Localization Method in Multipath Environment[J]. China Communications, 2017,14(3): 182-189.
[17] L Y, R P, L E S. Opportunities and Challenges in the Industrial Internet of Things based on 5G Positioning[C]//2018 8th International Conference on Localization and GNSS (ICL-GNSS). 2018: 1-6.
[18] Z Z, X Y, M Z, et al. 6G Wireless Networks: Vision, Requirements, Architecture, and Key Technologies[J]. IEEE Vehicular Technology Magazine, 2019,14(3): 28-41.
[19] 杨静娜. 太赫兹通信技术的研究与展望[J]. 数字通信世界, 2019(3): 62.
[20] 肖竹,王勇超,田斌,等. 超宽带定位研究与应用:回顾和展望[J]. 电子学报, 2011,39(1): 133-141.
[21] 尤肖虎,尹浩,邬贺铨. 6G与广域物联网[J]. 物联网学报, 2020,4(1): 3-11.
[22] 孙建国. 太赫兹通信技术的研究与展望[J]. 数字通信世界, 2018(10): 52-82.
[23] 张博文,林君. 6G移动通信的技术应用及发展前景[J]. 河南科技, 2019(29): 37-38.
[24] K M, C M, W J, et al. Joint Device Positioning and Clock Synchronization in 5G Ultra-Dense Networks[J]. IEEE Transactions on Wireless Communications, 2017,16(5): 2866-2881.
[25] B A, W X, H L, et al. Connectivity-Based Centroid Localization Using Distributed Dense Reference Nodes[J]. IEEE Transactions on Vehicular Technology, 2018,67(7): 6685-6689.
[2 6] 魏克军. 全球6G研究进展综述[J]. 移动通信, 2020,44 (3): 34-36.
[27] 赵亚军,郁光辉,徐汉青. 6G移动通信网络:愿景、挑战与关键技术[J]. 中国科学:信息科学. 2019,49(8): 963-987.
[28] 张乃通,赵康僆,刘功亮. 对建设我国“天地一体化信息网络”的思考[J]. 中国电子科学研究院学报, 2015,10(3): 223-230.
作者简介
赵军辉(orcid.org/0000-0001-5958-6622):教授、博士生导师,博士,现任职于华东交通大学信息工程学院和北京交通大学电子信息工程学院,主要研究方向为移动通信、交通信息技术、物联网等。
李一博:北京交通大学电子信息工程学院通信工程在读本科生,主要研究方向为物联网、移动通信。
王海明:教授、博士生导师,博士,现任职于东南大学信息科学与工程学院,主要研究方向为移动通信、天线和信道测量。
