非骨水泥型人工髋关节固定界面初始稳定性的有限元力学分析
2020-07-14金乾坤王巍何飞熊吴盼谢俊傅彦棉
金乾坤 王巍 何飞熊 吴盼 谢俊 傅彦棉
全髋关节置换术(Total hip arthroplasty,THA)作为目前最成功的外科手术之一,是髋关节疾病或损伤患者长期缓解疼痛、恢复关节功能的首选治疗方法。目前使用的股骨假体主要有两种类型:骨水泥固定型、非骨水泥固定型。骨水泥假体柄是通过丙烯酸骨水泥将假体固定在髓腔内,而非骨水泥假体柄是通过机械压配、将假体与活性宿主骨密切接触获得即刻稳定,也称为股骨假体生物固定。以翻修率来衡量骨水泥和非骨水泥THA假体柄存活情况无显著性差异[1],对于哪种固定方法最佳仍存在争议。术后初始稳定性直接影响髋关节置换术后假体与骨组织之间的骨长入、骨整合过程,是非骨水泥假体柄长期稳定性的决定因素[2]。初始稳定性取决于诸多关键因素,包括假体柄的设计、个体差异性、骨质量的不同、不同的载荷条件、假体压配数量[2]以及手术固定技术等。影响初始稳定性的另一个因素是假体柄在髓腔内的位置。非骨水泥型假体柄紧密地填充于股骨近端的髓腔,可获得良好的初始稳定性。然而,目前尚不清楚假体柄界面微动是如何随着假体柄接触率、接触位置的不同而变化的,也不确定哪个区域促进了更多的骨长入与骨整合。因此,本资料采用有限元分析(FEA)的方法,探讨THA术后攀爬楼梯时,假体柄接触率及其接触位置对非骨水泥型假体柄初始稳定性的影响。
1 材料与方法
1.1 构建人工髋关节置换术后有限元模型 采用东芝320排Aquilion VISION螺旋CT机间隔0.63mm,对一名健康男性志愿者进行轴向连续断层扫描,获得双下肢DICOM格式的CT断层图像(1563张),利用Mimics 15.0软件分割图像并计算获得股骨3D渲染模型。运行SolidWorks2014里面的Scan To 3D插件,通过网格处理以及曲面生成向导针对3D模型进行连续操作,包括除噪点以及缝合曲面等[3],建立出股骨的实体模型;同时使用SolidWorks软件根据非骨水泥型假体柄的参数构建实体模型,并与股骨定位装配。利用HyperMesh12.0软件中的网格划分工具对实体模型进行体网格划分。然后进入Mimics软件,使用CT灰度值赋值法取10层梯度对股骨材料赋材质(见图1A)。最后将赋值后有限元模型转入ABAQUS6.13-1中设定15种不同柄-骨接触率的术后模型,然后进行攀爬楼梯仿真分析。
1.2 有限元模型的单元类型、材料属性、工况设定、接触设置以及仿真分析 本资料股骨模型近端划分网格尺寸为1.5~2mm,远端区域划分的网格尺寸为5~7mm,假体柄的网格尺寸为1.5mm。考虑非线性接触收敛性问题,模型均采用了10节点二次元四面体网格(C3D10),一共生成了211598个单元(假体为101582,股骨为110016)(见图1B)。本研究所有材料均定义为线性各向同性均质材料,其中股骨材料属性赋值公式为Mimics软件提供的经验公式,股骨表观密度ρ和灰度值GV之间的公式:ρ=-13.4+1017×Grayvalue(g/m3),股骨弹性模量 E-Modulus(Elastic Modulus)和表观密度ρ之间的公式为E-Modulus=-388.8+5925ρ(Pa),股骨材料属性划分为10层。假体柄和颈由钛合金制成,假体头由铬钴合金制成,杨氏模量E分别为110GPa和210GPa,所有材料的泊松比设为0.3,见表1。本实验使用静态加载条件模拟攀爬楼梯,作为假体柄初始稳定性的临界荷载。根据体重836N计算得到的外展肌肌力、髋关节接触力分别为953N和2103N,合力方向通过建立局部坐标系进行控制;边界条件定义为股骨髁完全固定约束(见图1C、D)。Reimeringer等[4]建议将股骨柄与骨骼之间的接触面划分为四个区域:近端等离子涂层表面接触松质骨,中间的等离子涂层表面接触松质骨,远端抛光面接触松质骨以及近端等离子喷涂表面接触皮质骨。本实验模型近端接触面积43.0%,中间接触面积32.6%,远端接触面积22.9%,两个皮质接触面积1.5%,见图2。通过将每个区域的接触节点数除以接触节点总数来计算接触率。为了分析假体柄接触率以及接触位置对初始稳定性的影响,作者首先在假体柄-骨骼界面完全接触的情况下(四个区域100%全接触)对微动进行了评估。然后对四个接触区域分别组合定义为三种情况:首先,假设一个区域接触,另外三个区域存在间隙;其次,假设两个区域接触,另外两个区域存在间隙;最后,三个区域接触,另外一个区域存在间隙;共生成15个模型,所有模型网格密度均保持一致(见图3)。本实验通过面-面接触单元模拟假体柄与骨骼之间的接触,采用过盈配合-0.05mm模拟压配、 过盈配合0.05mm模拟间隙,等离子涂层表面与骨骼接触的摩擦系数设置为0.6,抛光表面与骨骼接触的摩擦系数设置为0.08。分别计算出假体柄接触面的位移、骨骼接触面的位移以及两者之间的相对位移(即假体柄-骨骼界面微动),并对比分析了假体柄-骨骼界面四个区域共计28297个节点的微动(μm)情况,其中平均微动用所有节点的平均值表示。
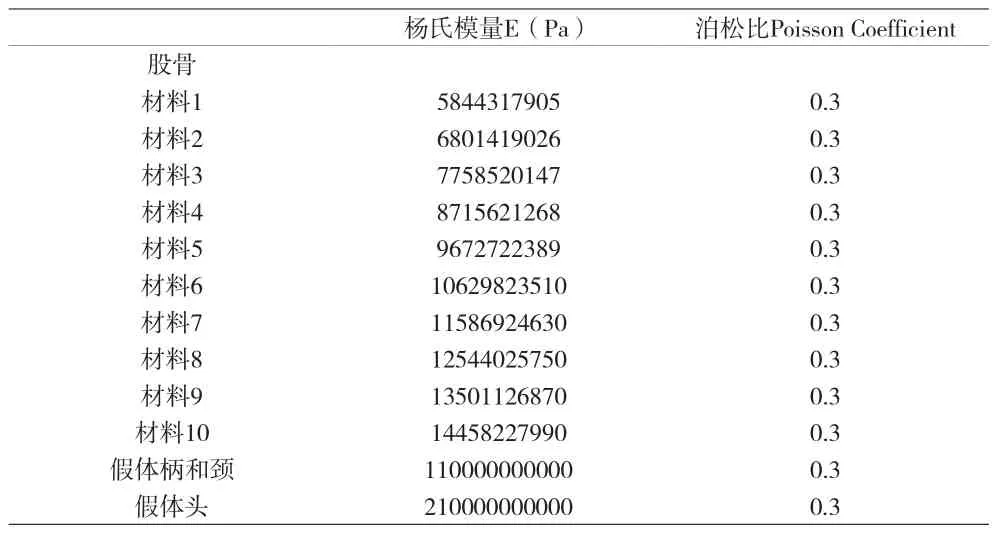
表1 本研究模型中股骨、假体的材料属性弹性模量E、泊松比
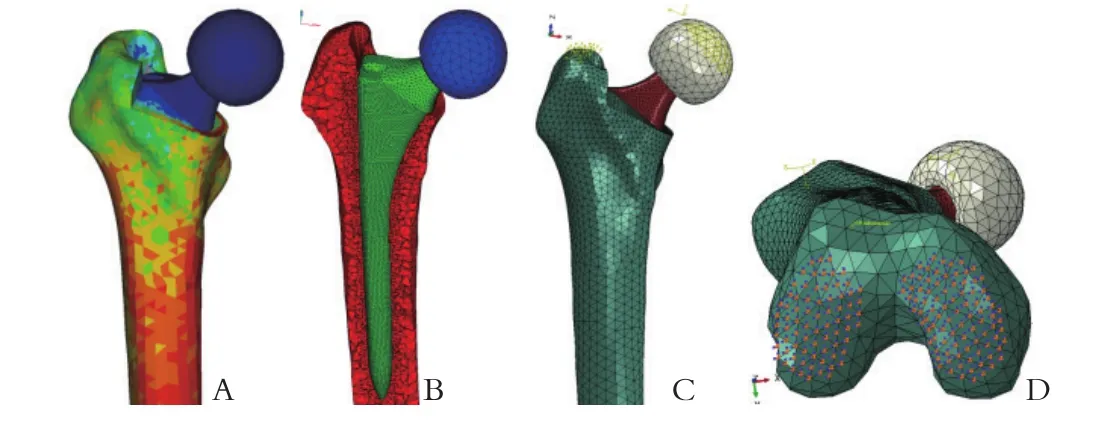
图1 THA术后模型(A:赋材质后模型;B:网格概览;C:加载外展肌肌力、关节面接触力;D:股骨髁远端完全固定)
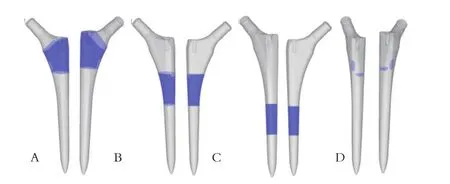
图2 接触面定义:近端等离子涂层与松质骨接触率43.0%,中间等离子涂层与松质骨接触率32.6%,远端抛光表面与松质骨接触率22.9%,近端等离子涂层与皮质骨接触率1.5%
1.3 有限元验证模型的构建与验证 本研究同时按照张国栋等[5]的实验方案构建1例股骨近端有限元验证模型,运算得到的Von Mises应力值、应变水平与国内外文献[5-8]的实验结果基本相符,有效性得到充分验证。
2 结果
模型1,当全接触时平均微动达到67.84μm,其中最大位移为93.37μm。假体柄界面的微动均在40~150μm范围内(预期部分骨整合)。
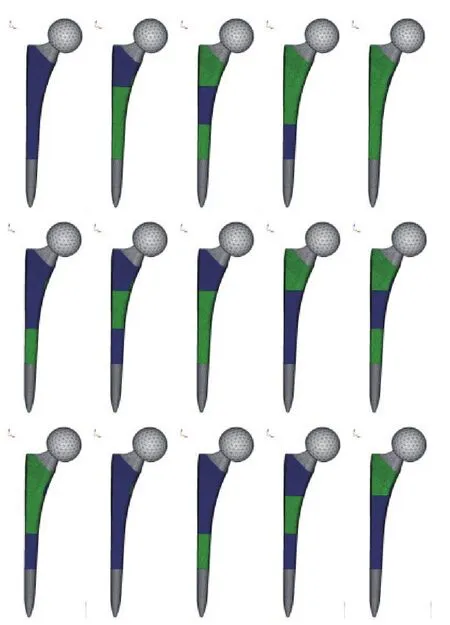
图3 压配接触模型示意图(蓝色代表压配接触,绿色代表存在间隙)
模型2~5,当仅有一个接触区域且其他三个接触面存在间隙时,存在三种情况:近端、中部、远端以及皮质接触。预测的平均微动均>40μm,分别为 74.30μm、78.97μm、83.07μm、73.92μm, 其中最大位移为111.03μm。假体柄界面的微动均在40~150μm范围内(预期部分骨整合)。
模型6~11,当两个接触区域且其他两个接触面存在间隙时,存在六种情况:近-中、近-远、近-皮质、中-远、中-皮质以及远-皮质接触。预测的平均微动均 >40μm,分别为40.91μm、54.12μm、45.46μm、68.23μm、61.50μm、65.38μm,其中最大位移为103.34μm。对于这六种情况中,0%~42.49%假体柄界面的微动≤40μm(预期骨骼生长),其余假体柄界面的微动均在40~150μm范围内(预期部分骨整合)。
模型12~15,当3个接触区域且另外一个接触面存在间隙时,存在四种接触情况:近-中-远、近-中-皮质、近-远-皮质以及中-远-皮质接触。预测的平均微动分别为31.54μm、26.95μm、37.88μm、46.89μm。对于这四种情况,22.55%~63.15%假体柄界面的微动≤40μm(预期骨骼生长),其余假体柄界面的微动均在40~150μm范围内(预期部分骨整合)。见表2、图4。

表2 假体柄-骨骼接触界面的节点位移、接触率(μm)
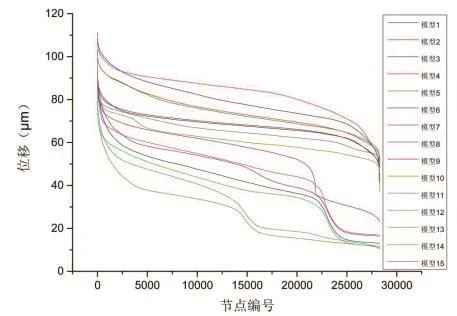
图4 假体柄-骨骼接触界面节点位移的对比图
3 讨论
THA术中通过修整髓腔形态,使假体柄与骨骼紧密接触、达到压配固定效果,然而这种处理只能确保假体柄与骨骼部分区域具有压配接触,其余区域存在间隙,这可能会影响假体柄初始稳定性,从而阻碍骨长入、无法获得继发稳定性,最终导致假体柄松动。
既往相关研究主要通过体外或者FEA预测攀爬楼梯时非骨水泥型假体柄的微动。Park等[9]评估了使用扩髓法对初始稳定性的影响,发现微动20~35μm,进一步研究了界面间隙对初始稳定性的影响,发现微动65~87μm。Pettersen等[10]研究发现不同实验对象的FEA模型,其微动值也不同,范围20~40μm。最后,Reimeringer等[4]研究了假体柄长度对初始稳定性的影响,发现微动0~115μm。本研究预测的股骨假体平均微动(26.95~83.07μm)和微动范围(10.50~111.03μm)与既往研究对比,结果基本相符。
本资料中全接触模型预测微动范围41.43~93.37μm,均处于部分骨长入微动范围内,骨长入并不理想。作者对15例模型进行分析发现,与骨长入有关的假体柄界面接触率范围主要集中在22.46%~86.97%,实验结果表明近端接触面积对初始稳定性影响最大。为了促进骨整合,假体柄近端表面通常设计为多孔涂层,当微动<40μm,预期可以出现骨长入。本资料中多孔涂层表面位于假体柄近端和中间部分,远端区域为抛光面,这个区域即使微动<40μm也不会出现任何骨长入。15例模型中有8例(模型1-5、9-11)初始稳定性受到损害,节点微动均>40μm(骨长入微动阈值),微动均处于40~150μm(部分骨长入微动范围),其中模型3(中部接触率32.6%)、4(远端接触率22.9%)、5(皮质骨接触率1.5%)、10(中部、皮质骨接触率34.1%)、11(远端皮质骨接触率24.4%),假体接触率均<40%(获得良好初始稳定性的接触率阈值[10])。模型9(中部、远端接触率55.5%)虽然接触率增加至55.5%,但是节点微动仍>40μm(骨长入微动阈值),因此,当假体近端存在间隙时,即使假体柄中部、远端均保持接触,初始稳定性也可能受到损害。模型1(全接触)、2(近端接触率43%)显示在全接触或者仅近端接触状态下也不能获得良好的初始稳定性。表明为了获得良好的初始稳定性,假体柄与骨骼之间不必要完全接触(同时这种理想情况是不可能实现的)。
此外,15例模型中有7例(模型6-8、12-15)获得良好的初始稳定性,22.46%~86.97%节点微动<40μm(骨长入微动阈值),其余节点微动均处于40~150μm(部分骨长入微动范围),其中4例模型中微动<40μm的节点比例分别为42.49%、54.65%、63.15%、86.97%。在这7例中有6例获得了近端接触,其中4例获得了皮质骨接触,皮质骨越坚硬,假体柄与周围骨之间的约束越强,假体柄不易移动,因此预测微动越小。说明为了获得假体初始稳定性,近端接触和皮质骨接触尤为重要。
本资料中进行的数字研究仍存在一定的局限性。第一,人类骨骼材料特征是非线性各向异性不均质属性,但本资料所有材料均定义为线性各向同性均质材料属性。所以,与人类骨骼真实的材料属性相比,预测的股骨假体柄微动可能存在一定的误差。第二,髋关节在生理活动过程中是动态暴露于不同负荷之下,然而本资料与多数生物力学有限元分析实验类似,将模拟的生理活动予以简化、定义为静负荷,即在髋关节周期活动中选取某一特定时间的峰值负荷作为加载条件,实验中也仅考虑了髋关节接触力和外展肌力。这种简化也有可能导致对微动的评估出现误差。第三,股骨生理状态下的稳定是由肌肉和其他软组织提供的,本实验中将股骨髁远端完全固定作为边界,引入额外的弯矩,可导致靠近边界区域出现应力集中、位移降低现象。本资料观察对象是股骨近端假体界面的微动情况,所以这种影响可以忽略不计。第四,实验中计算了假体柄在股骨特定位置的接触率,但是如果假体位置改变,会导致接触分布改变。然而,当假体位置稍有改变时产生的微动变化不大,所以研究假体柄接触率及其接触位置对非骨水泥型假体柄初始稳定性的影响,其目的是明确的。
