车联网多传感器融合探测系统软件设计与实现∗
2020-07-13陈少昌泮益恒
金 堃 陈少昌 泮益恒
(1.海军航空大学航空基础学院电子基础教研室 烟台 264001)(2.海军工程大学电子工程学院 武汉 430000)(3.92916部队 陵水 572400)
1 引言
自动驾驶与先进驾驶辅助技术利用车载传感器对路况态势进行实时感知,从而达到路径规划或辅助判情的目的,是降低交通事故发生率、提升驾驶安全性的有效手段。但目前该技术尚未成熟,系统中所使用的传感器也非常昂贵。此外在很多特殊场合中难以离开驾驶员对驾驶环境的整体把控[1~5]。基于此,本文以构建车路一体、车车互联的新型道路感知系统为目标,综合采用仿真实验与样机实测实验对新型自主车联网多传感器融合感知系统进行了设计与实验,研究设计了一款车联网多传感器融合探测系统(方便起见将其命名为MSFD-VI系统)。
它是集电磁波雷达、激光雷达、视觉系统等车载多传感器融合探测的系统[6~7],并且加入了车间通信的技术,在信息获取策略上加以改进,其工作模式如图1所示。

图1MSFD-VI系统工作模式
由图1可以看出本系统软件由前端数据采集部分、数据处理、目标识别与数据融合部分、位置换算部分、数据共享部分组成。以单车为设计中心,装载调频连续波雷达、激光雷达,光学传感器实现对车周态势的整体感知。由于一般无人车上使用的远距离探测激光雷达造价昂贵,因此本系统选用近距离的家用探测激光雷达,对车周14m内的环境进行精准探测;而对于车周中远距离的态势感知,本文自主设计了低功耗S波段FMCW雷达,经实验检测,该雷达可以实现对车周170m内的环境探测以及合成孔径成像的功能[8],与激光雷达结合实现对车周近、中、远距离的无缝环境探测[9]。除此之外,为了进一步加强本系统的安全性和对行人的敏感性,系统中加入了光学传感器模块,通过使用最高效稳定的SSD目标识别算法实现对车周视距内的目标分类识别[10],通过车联网将主车和从车的信息进行交换[11~14],获得更大范围内的环境感知,将所有获得的路况信息复合显示于主车车载终端地图上[15~16],可以更加方便地完成信息更新、更加直观地根据用户需求显示特定的结果,为安全驾驶提供即时有效信息。
2 软件设计
为了方便直观分析各个系统的检测结果和性能,基于Matlab GUI(Graphical User Interfaces,图形用户接口)创建工具Guide开发了车联网多传感器融合探测系统(MSFD-VI)软件。首先该软件可以完成对车载多传感器融合系统(VMS系统)数据的实时采集与处理,完成目标距离、速度以及车周环境整体感知结果显示;其次可通过车联网将主车和从车的信息进行交换,获得更大范围内的环境感知;最后本软件可以将所有获得的路况信息复合显示与车载地图上,可以更加方便地完成信息更新、更加直观地根据用户需求显示特定的结果,人机界面友好且可扩展性较强,为驾驶员提供方便。
出于辅助进行研究、降低开展实验时数据准备与平台搭建复杂度的功能定位,本节首先对MSFD-VI软件进行设计,可对软件的功能做出如下定位:
1)完成车周170m内的多目标距离速度探测;
2)能够做到狭窄幽暗环境下车周14m内障碍物感知及轮廓显示;
3)可以实现清晰目标的识别与分类;
4)能将VMS系统探测结果与开源地图进行复合显示;
5)能实现车联网内信息互通。
基于上述的复杂多样的软件功能定位,本节进行程序设计时,决定采用一个主程序界面多个子功能界面、通过菜单、控件的操作完成不同功能的调用。
针对对于MSFD-VI软件的定位,结合GUI界面创建的方法,本节开发的MSFD-VI软件功能框图如图2所示。

图2 软件结构设计图
3 软件设计实现
主要设计流程如下所示。
1)在Matlab命令窗口‘New’选项中选择‘Graphical User Interface’选项,如图3(a)图所示。

图3 采用Guide工具创建GUI流程图
2)选择一种创建方式,用户根据使用需求可以快速地基于示例进行创建,也可以采用完全自定义的方式重新创建,如图3(b)所示;
3)在确定的编辑方式之后自定义功能模块框,可以先定义窗口再添加算法函数程序,也可以同时进行,绘制如图4所示的功能模块框图;

图4 程序运行界面
4)利用Matlab的”Google Earth Toolbox”拓展工具箱,将雷达获得的极坐标转化为直角坐标,并根据测得的汽车位置的GPS坐标,计算出障碍物的经纬度,利用kmlStr=ge_poin(tlongitude, latitude,elevation)语句即可在地图上标注出障碍物的位置。
可以看出本软件主要分为五个部分。首先是定位部分,更新后可以实时显示本车所在经纬度并导入地图信息;其次是目标检测部分,对于距离最近的目标以及速度最快的目标的信息加以显示,起到预警的作用,同时对于探测范围内的障碍物可以加以高亮显示,方便驾驶员准确避障;然后是连通状态展示了目前车联网区域内的车辆数;信息交互部分可以对于联网的车辆信息加以提取,帮助本车获得更大范围内的路况信息;此外软件界面也可以选择将雷达、激光、摄像头采集到的信息分别显示或者综合显示与地图上。通过本软件能够实现功能的集成化,降低操作的复杂度。
4 MSFD-VI系统测试与结果
本节对于MSFD-VI软件进行实际的功能测试。主要分为车联网通信测试,激光雷达障碍物检测测试,FMCW SAR雷达测距测速测试,以及车周目标分类识别测试。下面对于各项测试结果进行分别展示与分析。
1)车辆网通信及激光雷达障碍物检测测试
方便起见,用两台笔记本电脑模拟两台车辆进行通信测试,用激光雷达探测到的信息作为通信内容。实验场景如图5所示,激光雷达的探测范围如图6内蓝色框内区域所示,两笔记本间距约15m。

图5 通信系统实验环境

图6 激光雷达探测范围示意
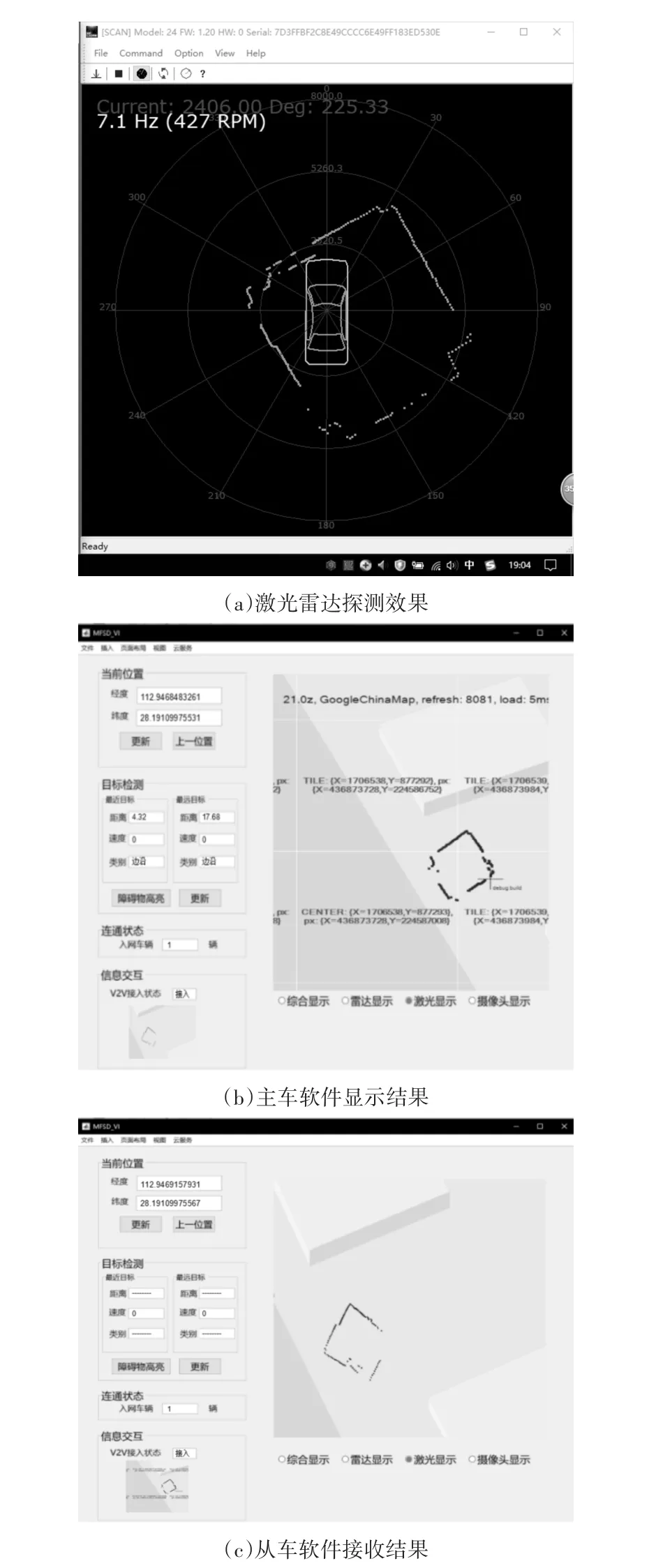
图7 通信系统实验结果
探测结果在软件中的显示如图7所示,可以看到图7(a)中激光雷达探测到的实验室边沿信息可以复合显示于图7(b)的软件界面中的地图上,图7(c)为从车通过车联网得到的信息,可以看出通信系统能够较好地完成数据传输的工作,但数据量有所减少。
2)MSFD-VI对多运动目标的检测测试
为了进一步测试雷达系统的检测效果,本节实验进行软件层面上的设计与实验。对于三个时刻的场景在此不做赘述,现将三个时刻的软件测试结果显示如图8所示。

图8 融合探测实验软件显示结果
从图8中可以看出本软件可以较好地将三个传感器测得的数据进行融合后经过坐标转换后与实验车的GPS信息加以结合得出目标定位,然后显示在预先导入的地图中,使驾驶员对车周环境有所了解。
5 结语
本文基于 Matlab GUI(Graphical User Interfac⁃es,图形用户接口)创建工具Guide开发了车联网多传感器融合探测系统(MSFD-VI)软件。由定位部分、目标检测部分,连通状态展示、信息交互部分以及传感器选择等部分组成,完成车周170m内的多目标距离速度探测;狭窄幽暗环境下车周14m内障碍物感知及轮廓显示;实现清晰目标的识别与分类;将VMS系统探测结果与开源地图进行复合显示;实现车联网内信息互通等任务,通过本软件能够实现功能的集成化,降低操作的复杂度。并进行实景测试,分为车联网通信测试,激光雷达障碍物检测测试,FMCW SAR雷达测距测速测试,以及车周目标分类识别测试。在170m内得到较好的环境探测与复现,实现了车周情况的融合探测。
