水面无人艇辅助型缆式水下机器人系统设计
2020-07-10周贤良辛绍杰董帅帅
周贤良,辛绍杰,董帅帅
(上海电机学院 电气学院,上海201306)
海洋面积约占地球总面积的2/3,蕴藏着广泛的资源,但由于海底环境的复杂多样,关于海洋资源的勘探与开发问题一直是各个国家面临的一大难点。水下机器人(Remotely Operated Vehicle,ROV)是能通过人的远程操控来替代人作业的一种人工智能系统,具有高度的记忆性和自主性,还可根据具体的情况作出相应的改变,是海洋勘探与作业的一项必不可少的工具,能够配备机械手在水下长时间作业,尤其当水下环境较恶劣,人员无法到达的深度和环境较危险时,其优势就会明显突出[1-2]。ROV还可携带定位声呐、图像扫描声呐、辐射及水质监测等传感器、金属测厚仪等设备,可对水下进行实时监控;ROV还可完成海洋石油钻井平台水下结构检修、近海搜索、水下考察、海洋生物科学研究等工作,避免了工作人员下海就可对海底情况进行了解[3]。目前,ROV 型号已经超过百种,全世界有近300家厂商提供各种型号的ROV及其零部件,在日本、西欧国家及美国居于技术领先地位[4-7]。
本项目研制的线控式小型特种ROV,总体采用框架式结构,通过高精度浮力调节机构加上4组推进螺旋桨为主体,其中两组大型推进桨实现前进和后退,另外两组实现对姿态欧拉角度及深度控制。ROV的本体上搭载有角速度陀螺、罗盘、摄像头水质分析仪等传感器,可以完成水下各种信息的采集,可搭载有机械手,实现捕获和打捞功能。水面无人艇(Unmanned Surface Vehicle,USV)搭载下视声呐和侧扫声呐,可以实时监控ROV 的位置和水底地形,为ROV提供定位和导航信息。本系统可以使得ROV 的移动范围脱离母船的停靠区域,有较好的机动性。
1 系统总体设计方案
图1所示为系统总体设计示意图,图2为系统设计实物图。设计的USV与ROV 之间通过有缆的方式进行通信。USV上安装有控制器,ROV 将本体的深度、速度、压力等信息传给USV,USV 通过自身安装的下视声呐和侧扫声呐得到水下环境,构建出水下情况回波图,识别出ROV的回波信号,获得ROV 和USV 的相对位置。通过声呐水下环境图或者数据库海图信息和水下机器人绝对位置数据对ROV进行路径规划,并实时监控ROV的航行轨迹。ROV具有自主驾驶仪,可以根据ROV的位置和声呐回波对其进行跟踪,并且根据ROV 和USV 的相对位置信息,保持水下电缆形状,防止水下电缆自身缠绕和电缆对ROV 行驶产生干扰。USV通过无线数据传输装置和母船保持通信,母船可以通过USV的中继作用监测ROV的运行。USV可以搭载更大的电源,可通过电缆持续提供ROV 的能源,极大地提高了ROV的续航能力。
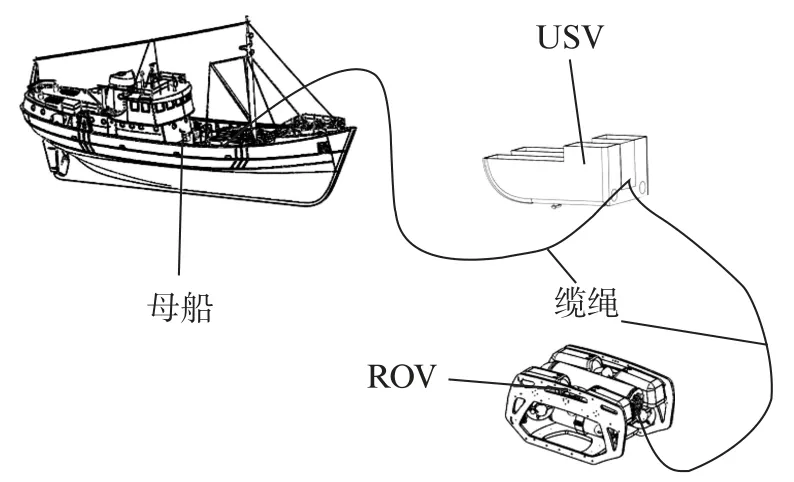
图1 系统总体设计

图2 系统设计实物图
2 ROV推进器设计与推力分布
潜水器水平方向动力使用螺旋桨输出推力,螺旋桨既可以实现推进作用,又可以起到转向的作用。本文所设计的ROV主要实现4自由度运动,目的是使其结构简单、控制方便。
推进器的布置一般应该遵循以下几个基本原则[4]:
(1)应尽可能地使三轴的合力交汇于一点,这一点应尽可能地接近载体的重心,这样可以防止产生有害的附加运动,给系统的控制带来麻烦。这一原则不是在任何ROV上都可行的,特别是小型水下机器人的空间有限,要做到这一点困难比较大。
(2)推进器的质量在ROV中占有较大的比重,在小型ROV中比重可能达到总质量的70%,因此尽可能减少推进器的数量也是很重要的问题。
(3)一般推进器布置应当使其轴线平行于动坐标系,这样可以取得最大的效率。但为了保证本文中的ROV的进退及其换向更加灵活,在此采用四推进器均与y 轴方向成α角布置,这种布置方案使用的推进器较多,其水平面的机动性好。
由于ROV的运动主要与水平推进器有关,垂直推进器只负责潜浮,故在此不作考虑。ROV 水平方向四推进器布置图如图3所示。
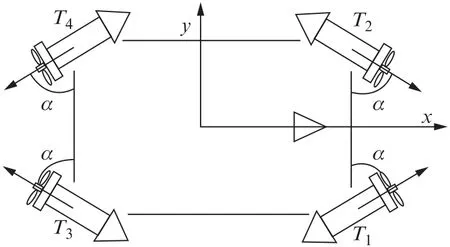
图3 ROV水平方向四推进器布置
四推进器与y 轴成α角布置,本文所用实际设备α呈45°角,表1给出了推进器联合状态与ROV的实际运行关系,可表示为[8]
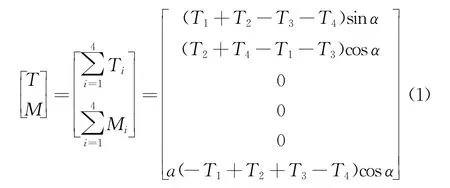
式中:T、M 分别为水平方向总推力及力矩;Ti、Mi分别为第i个推进器的推力和力矩;a为推进器相对于本体中心的力臂。
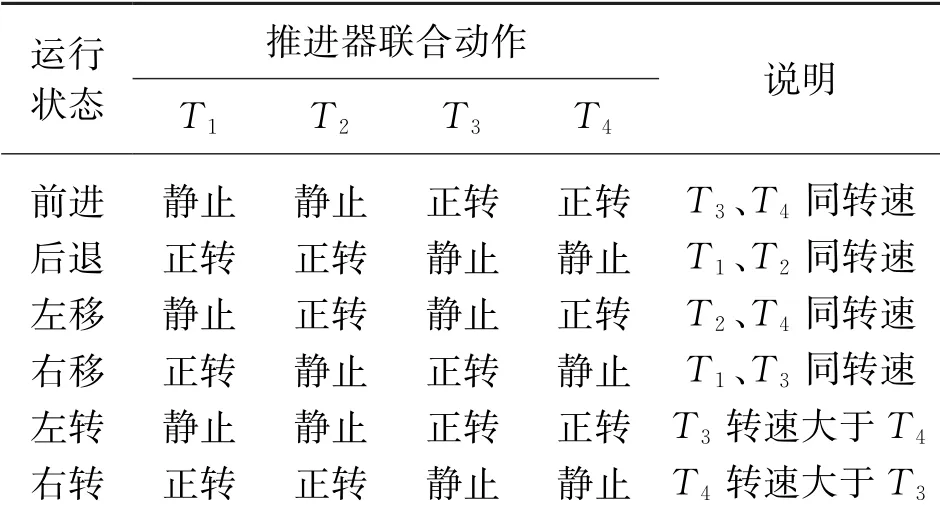
表1 推进器联合动作与ROV运动状态关系
给出螺旋桨的推力[8]

式中:ρ为水密度,kg/m3;n为螺旋桨转速,r/s;D为螺旋桨直径,m;KT为推力系数。
为了产生这一推力,螺旋桨需输入的力矩为[4]

式中:KM为转矩系数。
推力系数KT和转矩系数KM表示螺旋桨力和力矩的特性。螺旋桨的运动特性还必须用进速系数J[9]来表示,所谓进速系数,就是螺旋桨每转一周相对于水前进的距离h与螺旋桨直径D之比,而nh=vp,有

式中:vp为螺旋桨相对于水的速度。
螺距比H/D[10]也可影响螺旋桨性能,在进速系数相同时,螺距比越大,推力系数和转矩系数也越大。设计时,先预选了直径D为0.11 m,螺距比H/D为0.6的对称型螺旋桨。根据式(4),可以求得

根据进速系数和螺距比,查KT—J图谱[10],得到KT=0.25,求出单个螺旋桨的最大推力为

那么两个螺旋桨所能产生的最大推力Tmax=23×2=46 N,求出了最大推力Tmax,下一步可求出ROV在水中的阻力。
潜水器在水中的阻力主要包括:摩擦阻力Rf、黏压阻力Rp、电缆阻力Rd和附加阻力Re,即总阻力Rt=Rf+Rp+Rd+Re。摩擦阻力Rf是雷诺数的函数,与湿表面积有关;黏压阻力Rp与ROV 外形有关;Rd和Re与ROV的位置、结构等因素有关。
实验表明,潜水器表面边界层内的流动状态完全取决于局部雷诺数Re[11],通常层流状态的雷诺数为:Re<(3.5~5.0)×105;过渡流状态的雷诺数为:(3.5~5.0)×105<Re<3.0×106;紊流状态的雷诺数为:Re>3.0×106。由雷诺数可求出在不同流动状态时的平均摩擦阻力系数Cf[11]。
在层流状态时

要计算潜水器的摩擦阻力[11-12],先要确定边界层流体运动状态,由

可知Re<(3.5~5.0)×105,故边界层流体处于层流状态。则摩擦阻力系数为

其所受摩擦阻力为

式中:v 为水下机器人的航行速度;S为水下机器人的表面湿面积。
由黏性消耗水质点动能而形成首尾压力差,其产生的阻力称为黏压阻力,该力很难单独确定,一般通过实验方法来测得一定形状的物体的黏压阻力系数Cp或查阻力系数曲线,也可采用近似公式来计算黏压阻力Rp。查找相关资料[13-15],根据对应形状和雷诺数查阻力系数曲线得到黏压阻力系数Cp=0.8,则

电缆阻力与机器人所处的位置等许多因素有关,一般可以根据经验值对电缆阻力系数Cd进行估算。附加阻力包括螺旋桨、支架等阻力,精确计算附加阻力也是有困难的,一般都是根据机器人的外形结构,根据经验对附体系数kop进行估算。
对于大多数ROV,电缆阻力系数在0.1~0.2之间,取电缆阻力系数Cd=0.15,有

式中:A为电缆特征面积。
潜水器设计中,附加阻力常用附体系数kop的形式来表示。它是潜水器包含全部附体后较不含附体的潜水器所增加的有效功率(或阻力),与不含附体的ROV所需的有效功率(或阻力)之比,因此附体系数又称为附体阻力百分数。一般双螺旋桨ROV的附体系数kop=7%~10%。计入附体系数后,实际的阻力为[11-12]

由式(10)~式(12)可以得到

取附体系数为10%,最后得到总阻力为

由螺旋桨的最大推力Tmax=46 N,总阻力Rt=40.2 N,即Tmax>Rt,故能满足以最大要求速度克服阻力航行的能力。
为了产生ROV运动的推力,螺旋桨需要输入相应的扭矩M,查KM—J图谱[10],得KM=0.022,故

则所需输入功率为

最后,选定了型号为63ZY24-40的瑞航电动机,功率为50 W,额定电压为24 V,额定转速为1 500 r/min的永磁直流电动机。图4为推进器结构布置图。
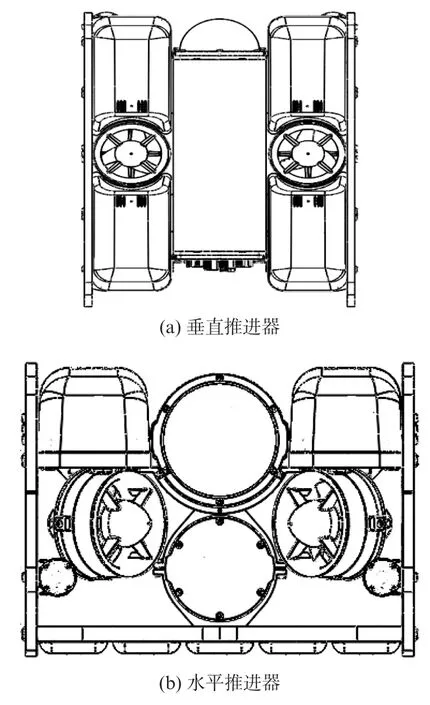
图4 推进器结构布置
3 ROV控制系统设计
控制系统是ROV的核心部分,由相应的软件和硬件组成。本项目的ROV 控制系统采用分布式控制,主要由水面PC机、水下树莓派和STM32处理器组成。整个ROV的控制系统如图5所示。
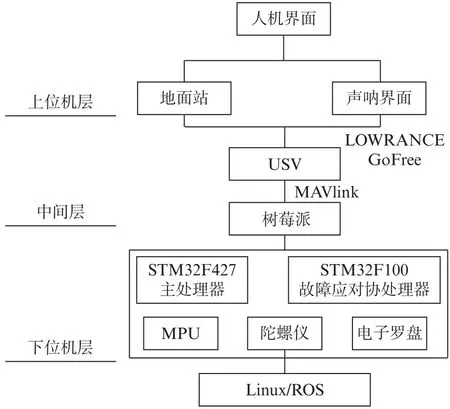
图5 控制系统总结构
系统中采用STM32F427微处理器作为下位机,PC机作为上位机,无人艇作为中间层,起到上位机和下位机之间的通信作用,作为中转设备提高了长距离通信的可靠性,传输介质为零浮力屏蔽电缆线。图6为上位机层、中间层及下位机层的通信示意图。
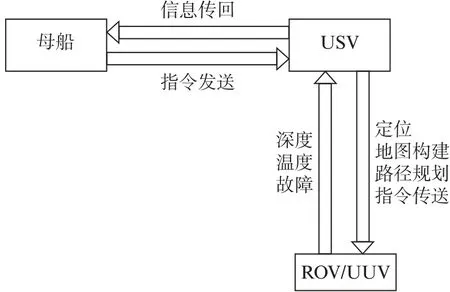
图6 系统通信
3.1 硬件系统设计
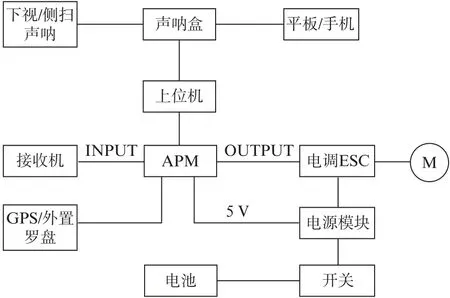
图7 USV硬件连接
3.1.1 USV硬件系统设计图7所示为USV硬件连接示意图,为了更好地与系统进行配合,该项目弃用原有的单片机,改用APM 控制器作为USV的控制器,以MISSION PLANNER作为USV的地面站,在地面站中通过对陀螺仪、GPS、ESC、遥控器等进行校准,并设置USV的多种运动模式。由于开源的车辆固件为非差动程序,为了更加灵活地控制USV的转弯,通过在开源平台(GITHUB)上下载固件代码后加以修改,并在Arduion上面进行修改编译成差动固件,再上传到APM 控制器。在USV上装载下视声呐和侧扫声呐,声呐盒内置Wifi与上位机连接,会将声呐回传至上位机。图8、图9所示为声呐回传画面,图8为水深0.8 m 时下视声呐和侧扫声呐回传画面,图9为水深1 m时的下视声呐和侧扫声呐回传画面,可看出在侧扫声呐回传画面左侧中显示了ROV的成像,由此可了解到ROV相对于USV的大致位置。
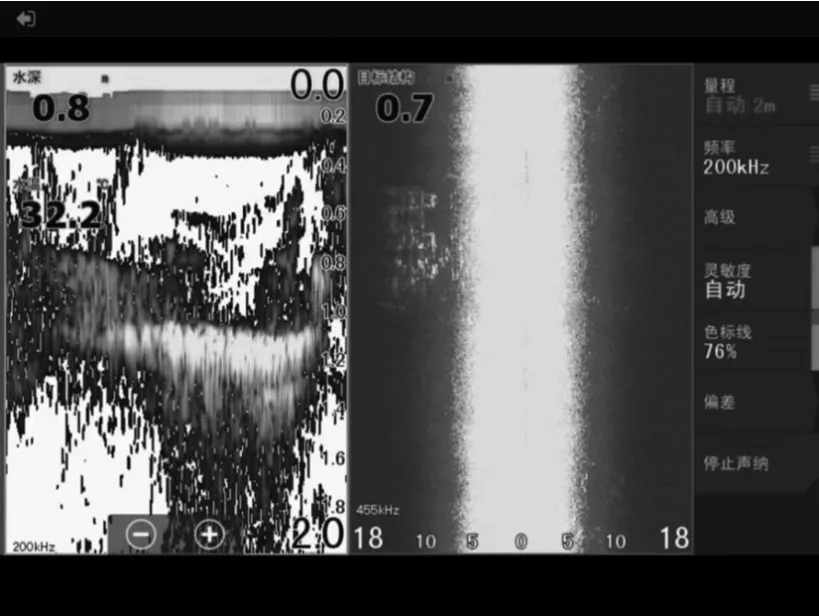
图8 0.8 m水深下视声呐及侧扫声呐
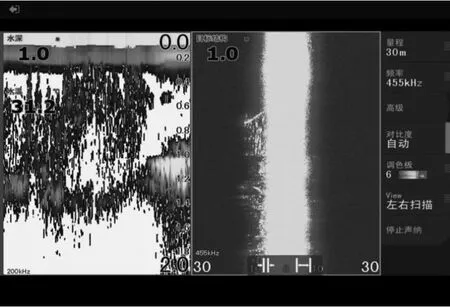
图9 1.0 m水深下视声呐及侧扫声呐
3.1.2 ROV硬件系统设计图10为ROV 硬件系统连接示意图。PC机与ROV 控制器之间通过零浮力电缆间接连接,中间采用USV 作为中转设备,树莓派与传感器之间可采用多种通信方式,并可将传感器采集的数据反馈给上位机,实现上位机和下位机之间的实时通信功能。控制器与树莓派之间通过数据线连接,并与水下灯、电调、电源模块、检漏器等设备相连。通过接受来自树莓派的指令,来控制推进器以及水下灯等设备的正常工作,树莓派以及控制器均安置于ROV 的电子舱中,通过电缆接口与上位机连接。图11为硬件实物图。
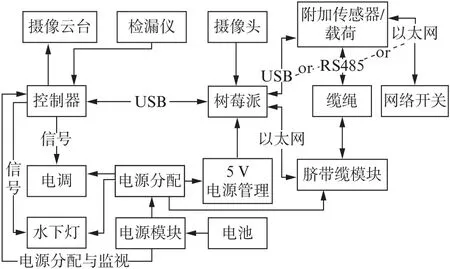
图10 硬件系统连接

图11 ROV硬件实物
3.2 软件系统设计
对于作业型ROV 控制系统软件主要有以下几个方面要求[16]:
(1)实时性好。ROV与上位机之间一般通信距离都达到成百上千米,对于长距离通信本身就会有延迟,为了保证数据通信、状态监测等任务的可靠性,必须在软件运行方面将延时降到最低,故对实时性要求比较高。
(2)精度高。良好的精度是保证ROV工作质量高的前提,例如ROV 的定位、定航等功能需对外界干扰有一定的抵抗能力,保证其自身航行及姿态角的收敛,因此控制精度要高。
(3)通信稳定。整个系统的通信方式大致分为水下与水面的通信和水下各部件之间的通信两种。上位机与水下下位机之间采用长距离的光纤通信,水下各部分采用CAN 总线的通信形式,包括导航系统、推进器、水下照明和各传感器的信息。该形式的通信方式较为高效,彼此干扰较小。
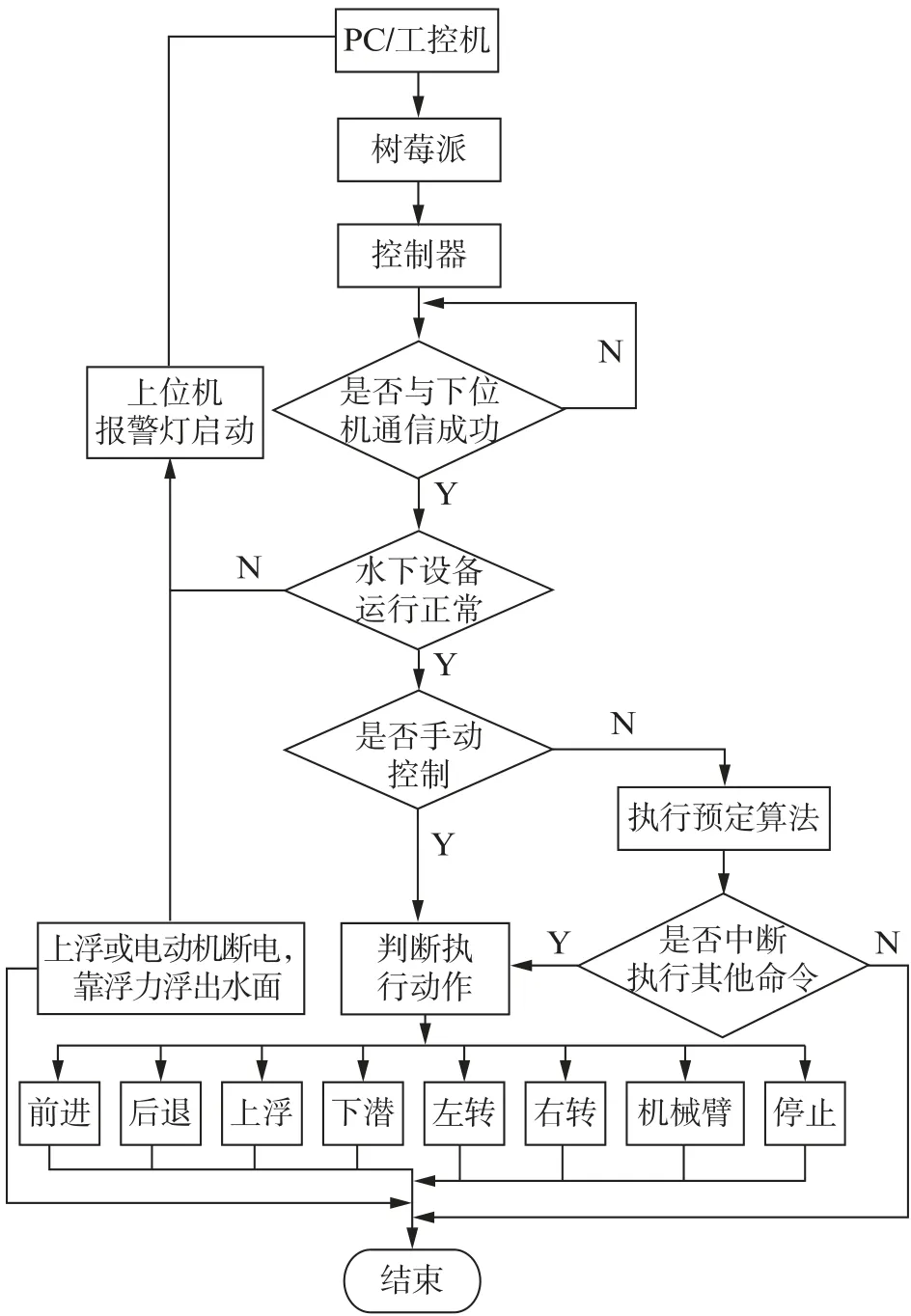
图12 控制系统软件总设计流程
图12为主要部分的控制系统软件设计总流程框图。上位机通过零浮力电缆与下位机相连,判断通信是否成功,如果失败,则不断地发送通信命令,直到通信成功;开始检测水下各设备是否出现故障,如果存在故障,则ROV 立即自动断电停止工作,同时,向地面站发出警报,工控箱警报灯亮起。当设备正常工作时,再判断具体的上位机指令,根据是否为手动控制来实施具体的指令,如实行预定算法时需中断执行其他命令,只需手动发指令即可中断预定算法命令。
4 结语
本文提出一种USV辅助型缆式ROV 的设计思路,通过水面对水下环境进行地图构建,具有更宽阔的视野信息,比ROV自身规划导航定位更方便简单;通过对整个系统在软件和硬件层面上的设计进行阐述,清晰地讲述了系统的架构。为了更直观地掌握ROV的位置,下一步将主要在现有的基础上研究USV对ROV的位置实时跟踪,通过USV的位置和深度传感器的信息,可很明显地得到ROV的水下详细位置。