船载三维激光扫描系统高原湖泊测量精度分析
2020-07-09石光胥洪川彭畅龙洪冯国正
石光 胥洪川 彭畅 龙洪 冯国正

摘要:高原湖区气候恶劣、交通不便、风力较大,采用传统测量方式或航测方式较为困难。根据高原湖区植被稀疏、地物较少、地势较陡、湖泊航行条件良好的特点,可开展船载三维激光扫描系统湖区陆上地形测量工作。介绍了船载三维激光系统坐标转换原理,分析各传感器及其集成误差,采用误差传播定律进行系统误差估计。经实例数据进行精度评定,证实了船载三维激光扫描系统在高原测量可靠性好、精度高,可为高原测湖陆上地形测量提供新的解决方案。
关键词:船载三维激光扫描系统;系统误差;误差传播定律;精度分析;高原湖泊测量
中图法分类号:P343.3
文献标志码:A
DOI: 10.15974/j.cnki.slsdkb.2020.05.001
船载三维激光扫描系统构建技术成熟,并已在内陆河道地形测量、海岸线测绘、岛礁测绘和港口测量中得到应用[1-3]。我国青藏高原地区湖泊众多,却因技术和安全原因,大多并未开展过系统科学的测量工作。因此,对这些高原湖泊开展测量工作,对填补国情资料空白、湖泊保护研究等具有重要意义。
高原湖区气候恶劣、交通不便,难以采用传统陆地测量方式。因高原气压、风力等气候因素影响,且申请空域、任务报批难度大,作业成本高,故也不宜采用航空摄影或机载雷达作业。青藏高原植被稀疏、地物较少、地形陡峭、湖泊航行条件良好,适宜船载三维激光扫描系统进行陆上地形测绘。在阐述船载三维扫描系统误差来源、各传感器精度估计的基础上,结合船载三维激光扫描仪系统时空配准原理,利用误差传播定律对船载三维激光系统集成精度进行评估与分析,并采用实例数据评定系统精度。
1 系统坐标转换原理
船载三维激光扫描系统中涉及到几个坐标系之间的转换,如图1所示。
假设在KL时刻,其对应地面点的WGS-84坐
2 系统误差来源
船载三维激光误差主要为各传感器误差和系统集成误差。
2.1 传感器相关误差
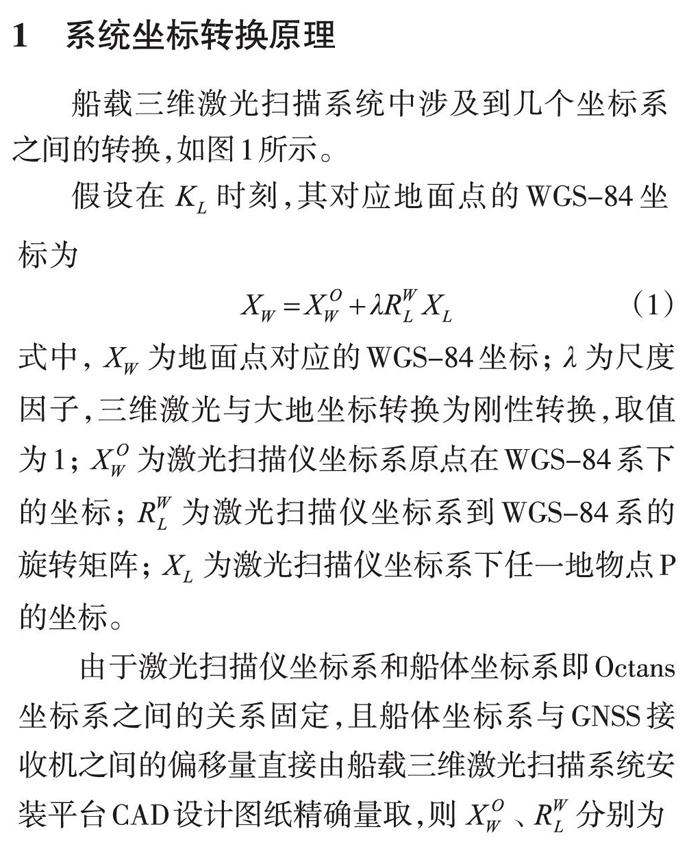
2.1.1 GNSS定位误差
GNSS主要误差源见图2。GNSS技术出现较早,相应的误差处理技术较为成熟,主要通过模型法、求差法、平差法予以消除或削弱[4-5]。
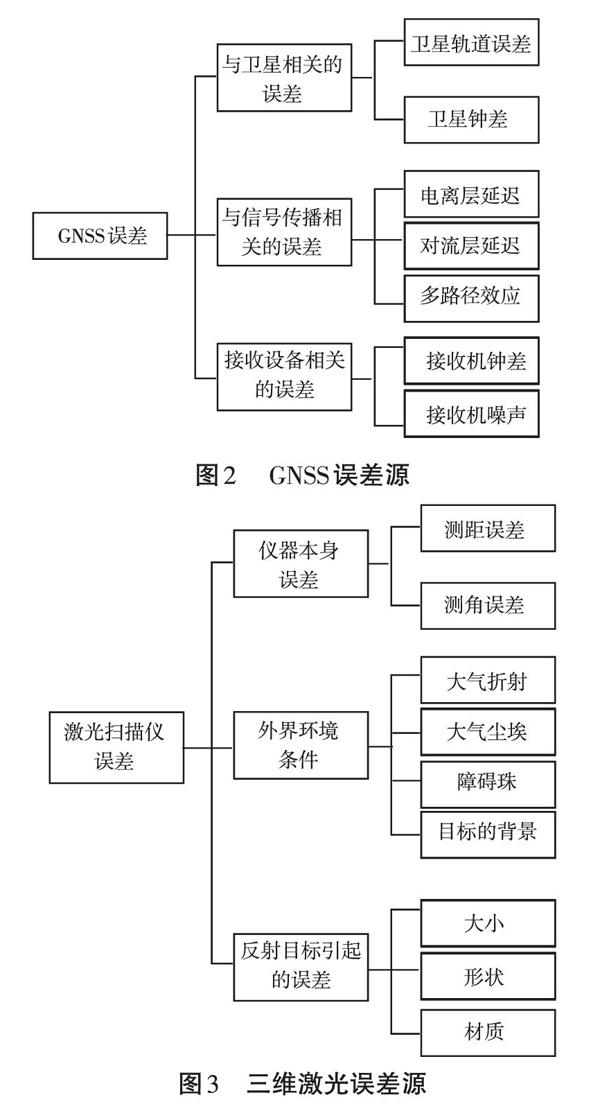
2.1.2 激光扫描仪误差
按照误差来源,激光扫描仪误差分为仪器本身误差、与信号传播相关的外界、环境引起的误差和反射目标特性引起的误差,见图3。
(1)仪器本身误差。主要是指仪器制造加工过程中的机械误差。这些误差难以消除或减弱,但可通过仪器检校、检定等方式予以减弱或抵偿。
(2)外界环境引起的误差。主要是由于测距、测角环境引起的三维激光扫描仪误差。其误差影响同全站仪,注意选择良好的作业环境。
(3)反射目标特性引起的误差。三维激光扫描仪的激光反射目标特性,如大小、形状、材质等对激光扫描仪测程和测距造成不同程度的影响。由于反射面的种类千差万别,尽管国内外学者进行了相关研究,但难以消除其误差影响,只有研究其变化规律进行改正,才能尽量减少反射目标特性引起的误差[6]。
2.1.3 0ctans误差
Octans是采用“Sagnac”效应实现为载体提供六自由度运动姿态和真北方向,其误差来源主要来自测区纬度与船速。
(1)纬度。Octans获取的真北方向与测区纬度的正割值成正比[7-8]。其误差影响见图4。
(2)船速。罗经定向、姿态误差受灵敏度影响,船速均会对其产生误差影响,在IS0 8728国际标准中规定:船速对航向角的影响可表述为V/5π(V为航速北向分量,单位为节)。以Octans的标称精度±0.10为例,则对应的速度误差V=0.1×5π≈1.57节。而当Octans不输入航速时,以实际测量中航速约6节为例,最大航向角误差为6/5π≈ 0.38°。由此看出,有必要在测量过程中保持匀速测量,在船体调头时北向速度变化最大,所以在测量过程中应尽量保证沿直线行驶,船舶调头时应暂停记录数据[6]。
削弱纬度和船速误差简单有效的方法为将GNSS定位数据(GPGGA)与对地速度(VTG)数据输入Octans,通过对Octans输入高精度船速和纬度数据达到提升其精度的目的。
(3)计算误差。主要包括截断误差和舍人误差。在姿态、航向解算过程中,会引入高阶项的截断误差和解算传播方程舍人误差,可通过提高更新率削弱误差。
2.2 与系统集成相关的误差
2.2.1 安置误差
船载三维激光扫描系统传感器安置过程中,无法做到传感器同心同轴安装,安装的偏心距和偏心角带来安置误差。通常Octans的中心为船载移动扫描系统中心,所以安置误差主要指GNSS相位中心与Octans中心的偏心距,三维激光扫描仪与Octans中心偏心距和偏心角。安置误差会使船载移动扫描系统数据结果出现系统性偏差,因此,系统作业前需要确定安置误差。本文通过安装平台CAD设计图及各传感器中心与外型尺寸说明精确确定安置位置,可有效削弱安置误差。
2.2.2 時间同步误差
由于传感器之间的差异,各传感器的时间基准也不尽相同,需要将各自的时间系统统一到标准UTC时间系统上。在多源数据融合时,如果各传感器时间系统不一致或存在偏差,就会对系统的解算结果产生影响。船载移动扫描系统集成的关键因素之一就是精密的时间同步。目前移动扫描系统的时间同步误差控制在1ms范围内[9-10]。
2.2.3 坐标转换误差
坐标转换误差为船载移动扫描系统进行多源数据融合时,由于各传感器坐标系转换引起的误差。此误差一般影响很小,可忽略[11-12]。
2.2.4 内插误差
内插误差是由于船载移动扫描系统的各传感器的采样频率不同,需要对原始观测数据进行内插,由数据内插产生的误差。目前,激光扫描仪的数据采样频率可达240 Hz,Octans的数据采样频率最高为200 Hz,而GNSS的数据采样频率最高为20Hz。因此,为了获得每个激光脚点的位置信息和姿态信息,就需要对GNSS数据内插。插值的算法很多,一般采用多项式插值计算。
3 系统误差分析
3.1 GNSS误差影响
船载三维激光扫描系统定位主要采用差分GPS技术,其对船载移动扫描系统的误差影响直接移植到系统的点云数据成果中。
3.2 激光扫描仪误差影响
激光扫描仪误差主要来自测距、测角误差,因此激光扫描仪误差对激光点云位置误差表达式为
3.4 安置误差影响
三维激光扫描仪设备安置过程中,由于激光扫描仪坐标轴系和船体坐标轴系不平行,导致两坐标轴系存在3个偏心角,通过安置角校正可解算出偏心角。假设确定3个偏心角的误差分别为Aa、△β、△γ(小角度值),可得到偏心角误差旋转矩阵。4系统精度估计
船载三维激光扫描系统最终点云数据成果精度主要与GNSS定位精度、Octans测角精度、三维激光扫描仪的测距、测角精度有关,根据误差传播定律及各传感器的标称精度,对系统进行理论精度估计。
其中,GNSS系统和安置向量误差是线元素,其精度直接传递到数据成果中。运动传感器和安置角是角元素,对数据成果精度影响类似,其误差传播式如下:
4.2 系统精度估算
三维激光扫描仪测距精度取8mm@150m。由于船载三维激光为2D线扫描,故不含其水平角误差,水平角φ取值为90°,动态测角精度取2.7”。GNSS定位水平精度取0.10 m,高程精度取0.15 m。同步误差取1 ms。设备安置向量误差2 mm。测船尽量保持匀速直线运动,内插误差按船速每节取1 cm。分别计算当扫描仪竖直方向夹角为450时,船速为2,4,6节对应不同得扫描距离三维坐标精度见表1。
5 精度评定
以青藏高原格仁错湖泊为例进行精度评定。
5.1 测区概况
本次测量高原湖泊为格仁错湖区。格仁错湖泊位于西藏自治区那曲地区申扎县境内,北纬30°57- 31°19,平均海拔4650m。湖面长约60.0 km,最大宽14.0 km,平均宽7.93 km,面积475.9 km2。
5.2 数据采集及处理
船载三维激光扫描系统集成各硬件应相对稳定,且设备安装平台与船体应保证牢固安装。设备安装平台强度高,且不应造成由船体震动而引发永久变形。通过平台设计图与各硬件的几何中心确定,其相互位置关系,系统集成见图5。
数据采集主要采用Qinsy软件控制三维激光扫描仪V2-2000、运动传感器OCTANS和相机的工作。V2-2000采用2D线扫描模式,量程设置为750m。船沿着水岸线前进过程中,距离岸边约100 m,V2-2000采集点云数据,Octans采集姿态、航向数据,GNSS接收机提供导航定位信息及时间同步数据(GPGGA、ZDA、IPPS),同轴相机按照一定的时间间隔拍照记录岸上数据特征;内业数据处理时,首先由Qinsy软件输出经校准后的点云数据,导入三维点云数据后处理软件测量RISCAN Pro,后用EPS三维模块生成数字地形图(DLG)成果,其流程见图6。
5.3 精度评定
为评定系统精度,在点云中提取特征点,利用RTK测取点云“同名点”坐标,利用二者较差计算中误差,计算式为式中,n为观测个数;Vi为观测值较差。船载激光扫描系统与RTK测得坐标较差见表2。
根据式(28)及表2统计结果计算得出,X中误差为+0.105 m,y中误差为+0.079 m,平面位置S中误差为+0.131 m,高程Z中误差为+0.092 m。
6 结论
利用船载三维激光扫描系统进行高原湖泊岸上地形测量,阐述了船载三维激光扫描系统各传感器误差来源及削弱措施。分析了系统集成坐标转换原理,并推到坐标转换实现过程。利用各传感器精度及误差传播定律,评估船载三维激光扫描系统误差,并用实例数据进行精度评定,得出如下结论。
(1)提出的船载三维激光扫描系统各传感器及其集成误差来源及削弱措施可为系统集成和数据采集精度控制提供参考。
(2)根据船载三维激光扫描系统集成坐标转换原理,得出系统坐标转换式,利用误差传播定律得出系统误差方程,对系统集成误差评估及传感器选择提供依据。
(3)经实例证实,船载三维激光扫描系统在高原地区适用性强,测量数据可靠且精度高,能够满足高原测湖精度要求。
参考文献:
[1]周建红,马耀昌,刘世振,等,水陆地形三维一体化测量系统关键技术研究[J]人民长江,2017,48(24):61-65.
[2] 邓神宝,沈清华,王小刚,船载激光三维扫描系统构建与应用[J].人民珠江,2016,37(10):23-26.
[3] 边志刚,王东.船载水上水下一体化综合测量系统技术与应用[J].港工技术,2017,54(1):109-112.
[4]刘占超,庞建成,刘百奇,一种改进的高精度POS时间同步方法[J].仪器仪表学报,2011,32 (10):2198-2203.
[5] 徐寿志.车载移动测量系统检校技术及其评定方法[D].武汉:武汉大学,2016.
[6]黄亚洲,曹忠良,航速及纬度误差对Octans航向值的影响[J].中国水运,2018,18(6):5-6.
[7] 汪連贺.三维激光移动测量系统在海岛礁测量中的应用[J].海洋测绘,2015,35(5):79-82.
[8]陈尚登,杨俊凯,杨振林,等,基于船载三维激光扫描系统的航道沿岸大比例尺测图[J].中国水运,2017,36(11):197-200.
[9]赵珞成.GPS输出的NMEA0183信号的时间特性分析[J].海洋测绘,2002,22(3):19-21.
[10]赵珞成.利用CPS导航信号进行水下地形测量的时间同步[J].海洋测绘,2002,22(5):11-14.
[11]曹玺,梁俊,王延洪,等.三维激光扫描技术在地形测绘成图中的应用[J].人民长江,2011,41(21):22-24.
[12]李志鹏,张辛,喻守刚,等,基于三维激光扫描的大比例尺地形测绘方法研究[J]人民长江,2014.44(7): 70-73.
(编辑:唐湘茜)
作者简介:石光,男,工程师,主要从事河道勘测工作。E-mail: 57371054l@qq.com
