基于k最近邻的激光雷达飞机尾涡识别
2020-07-08潘卫军吴郑源张晓磊
潘卫军,吴郑源,张晓磊
(中国民用航空飞行学院空中交通管理学院,广汉618307)
引 言
飞机尾流是飞机产生升力的必然产物,主要是由翼尖涡流构成。当后机进入前机尾流影响区域时,可能会发生滚转、掉高度等危险情况[1]。当前机相对后机质量更大时,该现象变得尤为明显[2]。因此,国内外学者对飞机尾流演化机理进行了充分的研究,国内外民航组织均制定了相应的尾流间隔标准,美国和欧盟也开发了相应的飞机动态尾流间隔系统[3-6],用于保障航班安全。
针对飞机尾流的研究方法主要包括拖曳水池试验、风洞试验、计算流体动力学数值模拟和使用测风设备直接探测等。考虑到尾流的形成和消散会受到环境因素的影响,前3种方法研究的均是固定的参量下的尾流演化机理,而实际大气并不是均匀的理想气体,即使是考虑一定范围,还是会存在差异。因此通过结合机场当地测定的影响飞机尾流的参量,使用测风设备对飞机起降过程中的尾流进行研究,能够较为准确地分析和刻画出特定机场的飞机尾流特性。
激光雷达测风设备具有高精度、高准确率的特点,国内外学者均使用激光雷达对飞机尾流进行大量的研究。HANNON等人使用脉冲相干激光雷达对飞机尾涡进行探测,并通过理论分析和实验结果相验证[7]。HARRIS等人使用连续波激光雷达对飞机尾涡进行探测[8]。XU等人从对称性、展宽性以及反比性3个特性来分析尾涡识别方法[9],但未使用实地探测的数据进行验证,且判定是否存在尾涡时,需要对3种特性的设定门限值,在实践过程发现门限值较难设定。传统飞机尾涡刻画模型考虑的是飞机尾流影响区域产生的切向速度,这与激光雷达所探测到的径向速度有所区别。其次,传统尾涡刻画模型在较为均匀的风场下与实际尾流数据较为符合。在实际探测过程中,背景风场往往都是非均匀风场,此时传统模型和实际飞机尾涡数据并不能很好的匹配。作者所在团队使用脉冲多普勒相干激光雷达在国内某机场进行了实地探测工作,在前期提出一种基于波形相似度匹配的飞机尾涡识别方法[10]和基于Alex的激光雷达飞机尾涡识别方法[11]。波形相似度匹配的方法将标准涡的波形与探测的结果匹配,静风条件下效果良好,当具备一定背景风时,识别精度有限。图像识别的方法能够有效地对飞机尾涡图像进行分类,但需要将激光雷达采集的数据生成图像,再进行识别,且受限于生成图像的方法和径向速度色标设定的限制,不能满足所有的情况,尤其是当具备一定不均匀背景风场的情况或色标设定过大或过小的情况下,错误识别率会大大提升。
鉴于此,作者基于激光雷达探测的起降航班尾流数据,对比分析了基于经典尾涡模型的正负速度包络法的缺陷,进而提出对特定大小矩形区域特征提取方法,并使用 k最近邻(k-nearest neighbor,KNN)算法对提取特征后的飞机尾涡进行有效的识别。
1 飞机尾涡模型
飞机上下翼面存在压力差,其经过的区域的空气受到扰动,最终呈现为一对涡旋的形式,其强度用涡环量来衡量。涡环量与飞机的重量成正比和飞机的速度成反比,初始涡环量Γ0用下式表示[1]:

式中,M,B分别表示飞机的质量和翼展,g为重力加速度,ρ为周围空气的密度,S为载荷系数,v为航空器速度,b0为初始涡核间距。
在模拟飞机尾涡剖面径向速度的模型中,Hallock-Burnham(HB)模型因使用实际数据进行修正且表述较为简单进而获得了广泛的应用,HB模型表示见下[1]:

式中,r为距涡核的距离,rc为涡核半径(通常设为0.052b0),vt(r)表示切向速度。
激光雷达通过对大气气溶胶粒子的探测,在晴空条件下能对航空器尾涡进行较为精确的刻画。由于飞机尾涡的影响面是对飞机飞过垂直平面的空气扰动,因此,常规的探测方式是对飞机的飞行轨迹的垂直剖面进行距离高度指示器(range height indicator,RHI)模式的探测,具体如图1所示。
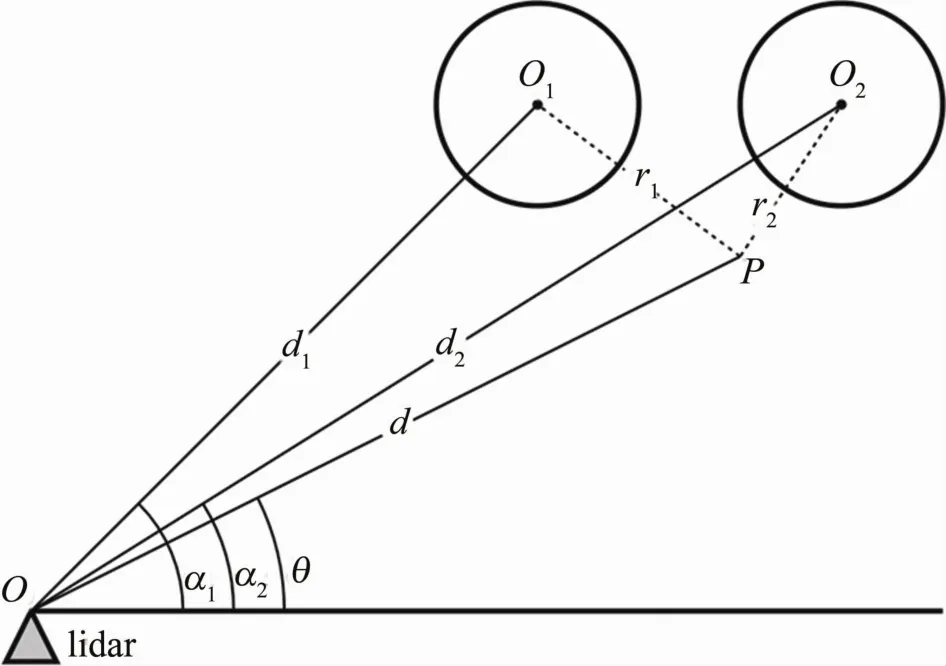
Fig.1 Schematic diagram of wake vortex measurement of LiDAR
图1 中,O1,O2,O分别为左、右涡心和激光雷达探测点;α1,α2,θ分别表示雷达 RHI扫描时左、右涡和探测空间点俯仰角;d1,d2,d分别为激光雷达点距离左、右涡心和探测空间点的距离;r1,r2分别表示探测空间点距离左、右涡心的距离。
激光雷达处于RHI模式探测时,方位角固定,改变俯仰角对激光雷达接收回波做快速傅里叶变换,得到固定距离门的径向风速速度,负值为接近激光雷达方向的速度,正值为远离激光雷达方向的速度,数值的大小即为速度的值。当雷达从设定的扫描俯仰角扫描一周时,即得到一个切面的径向速度风场:

式中,ρi表示距离激光雷达的径向距离,θj表示激光雷达的俯仰角角度,vr表示该极坐标对应的径向速度,n和m分别是激光雷达探测扫描所得到的俯仰角离散值的个数和径向距离门的个数,实地探测采用的激光雷达,距离门个数n=56。
以全球飞机类型数量最多的空客A320为例,其机型参量如表1所示。
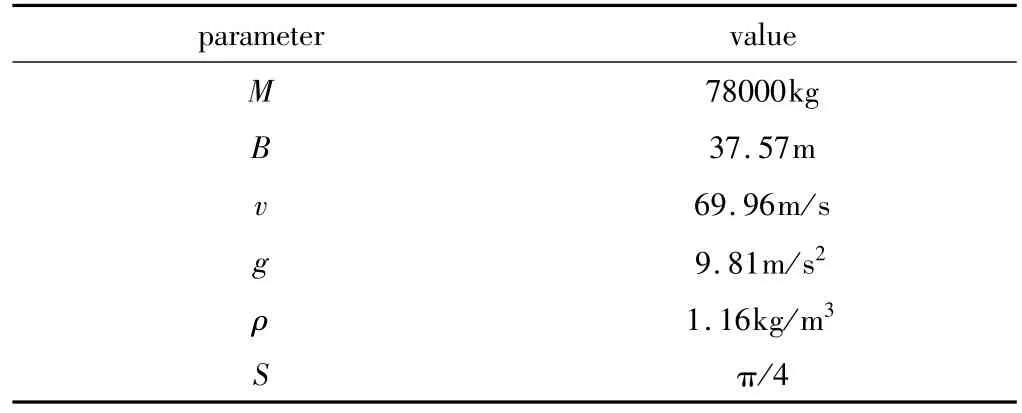
Table 1 Parameters of Airbus A320 and environment
将表1中的机型参量和环境参量代入(1)式和(2)式,设定飞机左右涡的涡心距离地面的高度为50m,涡点连线的中点距离激光雷达的水平距离为200m,背景风场为静风。图2a为依据这些参量所计算出的切向速率图。静风条件下HB模型得出的尾涡为左右对称的涡旋结构,最大切向速度值为15.30m/s。表2中列出了实地探测中使用激光雷达的特征参量。
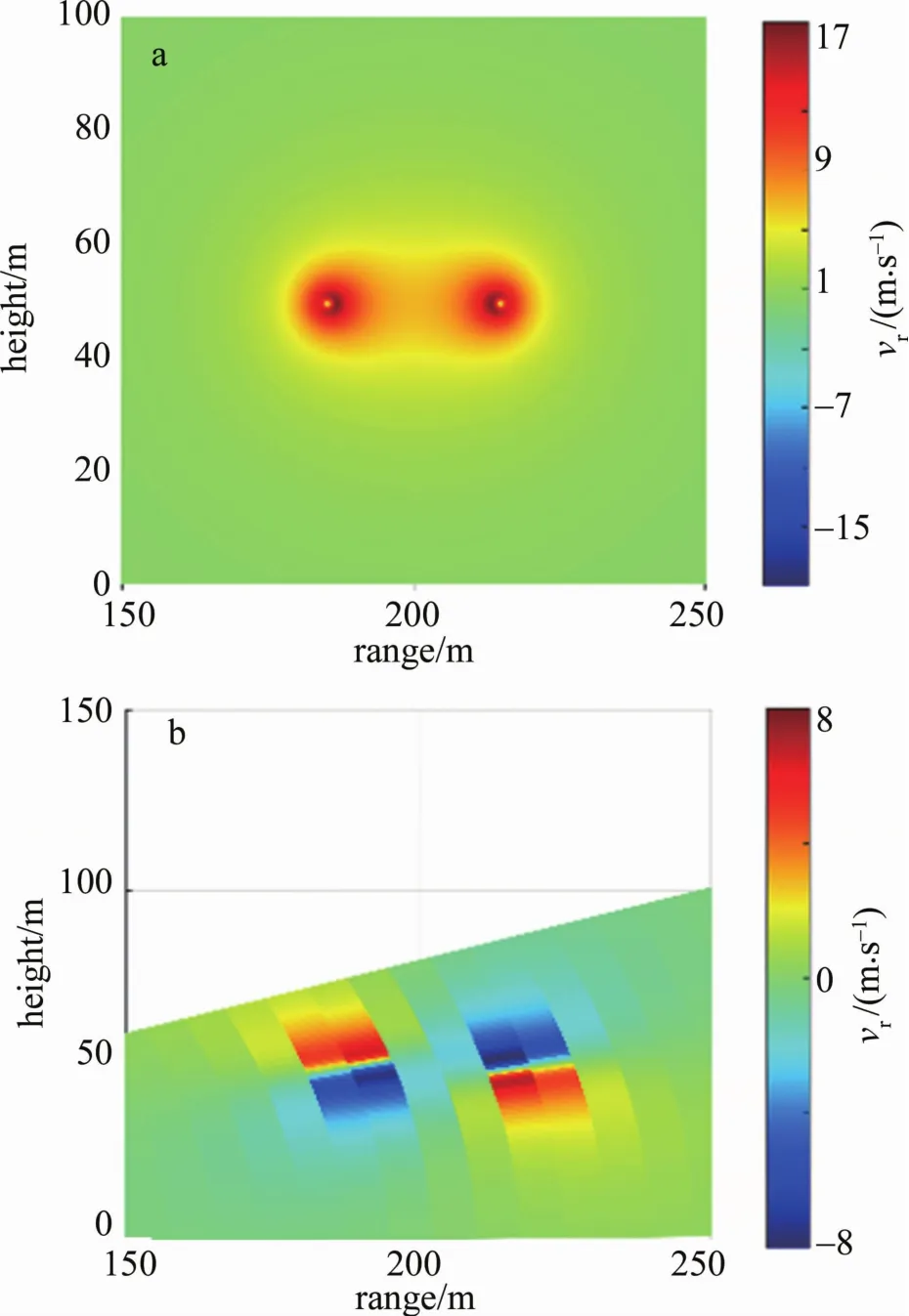
Fig.2 Wind field of HB model and simulated LiDAR detectiona—tangential velocity calculated from HB mode—radial velocity calculated by simulation
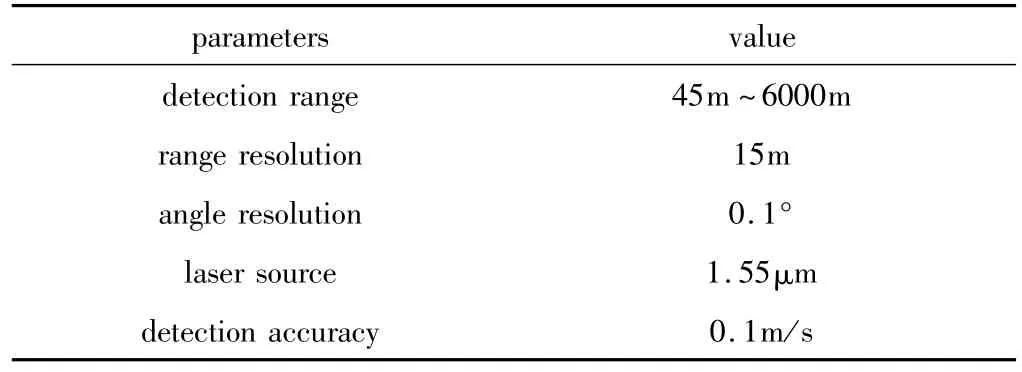
Table 2 Main parameters of the LiDAR
受限于激光雷达探测原理,脉冲激光雷达扫描得到的速度为径向速度,相对切向速度,径向速度损失了垂直于雷达扫描径向上的速度分量,且有限的径向分辨率和角度分辨率,所得到的径向速度为(3)式所示的离散数据。根据现场探测试验的实际参量,假设脉冲多普勒激光雷达探测精度良好,径向分辨率为15m,角度分辨率为0.2°,根据图1中描述的位置关系和设置的参量,计算出图2a的切向速度场激光雷达探测到的径向速度场,如图2b所示。此时最大径向速度值为7.87m/s,相对15.30m/s的最大切向速度值损失了接近一半,因此,使用传统尾涡模型在匹配激光雷达所探测的径向速度场时存在较大的误差。此外,根据HB模型计算结果可得,空客A320的尾流在静风条件下的径向风速场影响区域为长100m、高70m的矩形区域。
2 径向速度风场特征提取
多普勒测风激光雷达每次扫描获取的为离散数据,即固定方向固定距离的径向速度,如(3)式所示。如将径向速度场直接当作特征用于分类,同样的一组径向风速,不同的排列(角度、距离)可能会有截然不同的分类结果,因此在对激光雷达径向风速数据识别分类时,需先进行特征提取,提取中其中能表征飞机尾涡的特征。
本团队于2018年8月至10月在国内某机场使用激光雷达进行飞机尾流的探测实验,图3展示为现场探测激光雷达和飞机的位置。作者从探测数据中选取了包含了具有一定背景风速较为典型空客A320的尾涡数据和非尾涡数据合计1273组,其中643组数据存在尾涡,另外630组数据不存在尾涡。图4为实地连续探测的一组空客A320的径向速度图。尾流影响范围为长100m、高70m的矩形区域,这与HB模型计算的结果基本一致。整个背景风场的风向大体趋势是远离雷达的方向,其中红色和绿色区域相接的地方是探测出的尾涡区域,可以观察到尾涡受背景风场等因素的影响,朝右下移动。对比理论模型计算出的模拟探测图(如图2b所示),在实际探测的数据中背景风场具有一定的风速,风场存在非均匀现象,此时使用波形匹配的方法计算出的波形和标准涡相差较大,对于图4b,使用图像识别的方法特征已经不是很明显,变化色标的范围,效果会更差。

Fig.3 Filed test of LiDAR
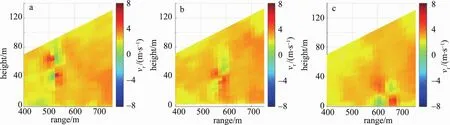
Fig.4 Wake vortex of Airbus A320 detected by LiDAR
考虑到背景风场为影响飞机尾涡的重要因素之一,在非均匀背景风场下,初始涡和标准涡有较大差异,因此本文中选择平均背景风速作为重要的参考特征,用于表征背景风场对于飞机尾涡的影响,如下式所示:

图5分别为多普勒激光雷达RHI扫描模式下,同一径向风速场的径向风速图、距离速度极差图和仰角-速度极差图。如图所示,真实的背景风场存在非均匀性,传统的方法对径向风速场按照俯仰角或距离提取多普勒速度极差[12],从而判断极差最大的位置为涡核中心,存在误判的可能。以距离为基准的最大正负速度包络曲线处代表的区域并不是尾涡区域,以扫描俯仰角为基准的最大正负速度包络曲线也不是尾涡区域。
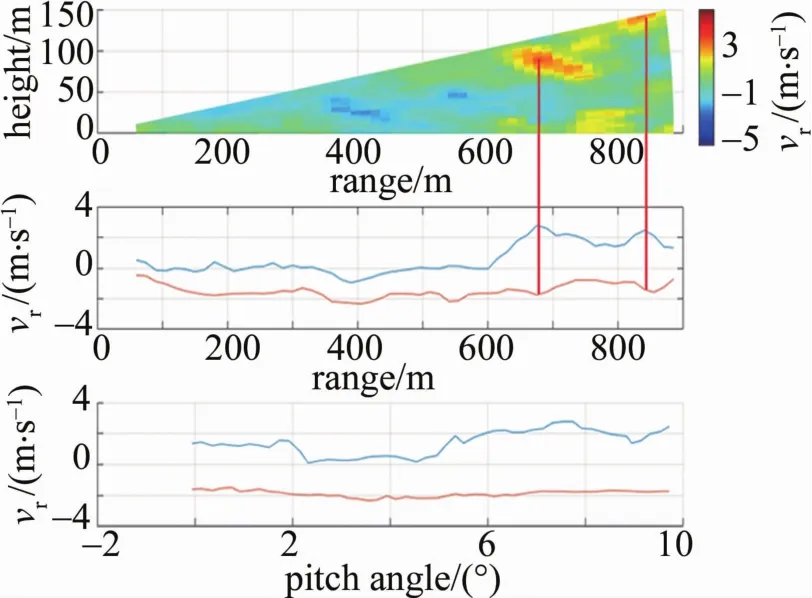
Fig.5 Comparison of velocity rangea—radial velocity of wind field detected by LiDA—velocity range of different rang—velocity range of different pitch angle
鉴于此,本文中将完整径向速度场区域内的径向速度极差作为特征参量,即:

3 k最近邻分类方法
KNN分类算法是经典的统计学分类方法之一[13],其原理是通过从训练数据集中选取最接近待分类数据的k个实例,根据其参量和类别预测样本的分类,如图6所示。图6a中正方形和正六边形分别代表已分类的数据集,五角星代表待分类的数据[14-15]。
训练数据集T为KNN输入:

式中,xi∈X⊆Rn为实例的特征向量,yi∈Y⊆{c1,c2,…,cK}表示实例的类别,对于径向风速场的类别,分为两类:存在尾涡和不存在尾涡,N为数据集的大小。
对于单组数据的特征xi包含了的特征表示如下:

式中,下标i表示第i组数据,下标(l)表示数据的第l维特征。此处l=2,对应第2节中所提出的平均背景风速和矩形区域速度极差,作为KNN分类的特征参量。影响KNN分类结果的因素主要包括已分类数据集、k值的选择、距离度量方式和分类决策规则。
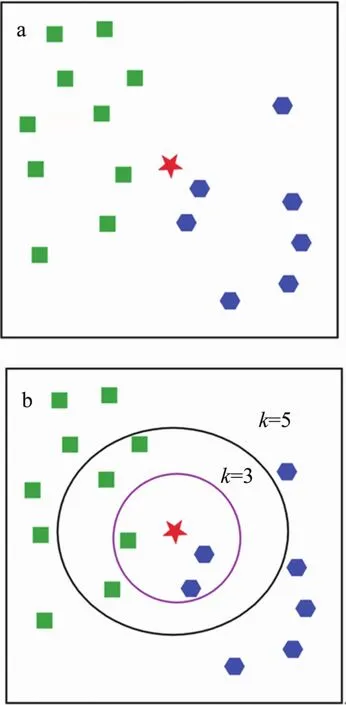
Fig.6 Diagram of KNN classification
如图6b所示,k值分别为1,3和5时,对于五角星的待分类点的预测结果分别为正六边形、正六边形和正方形,k值的选择对于预测分类的结果影响极大。选择较大的k值会减少特征较为相似的数据对预测分类结果的影响,较小的k值则会增加异常数据对于预测分类结果的影响,因此k值应依据数据的特点进行选取。在具体应用中,k值一般取一个比较小的数值,采用交叉验证法来选取最优k值。使用交叉验证的方法来确定k值的大小,通过将数据70%作为KNN的训练的训练数据集,故训练集的大小N=891,剩下部分作为测试集。
KNN采用闵可夫斯基(Minkowski)距离Lp来度量数据间的相似度:

式中,xi表示测试点第 i维特征值,xi,(l)表示样本点第l维特征值,p为常数值。
在实际应用过程中,KNN一般选用p=2时的闵可夫斯基距离,即欧氏距离,也是本文中所采用的距离度量方式,即:

分类决策采用多数表决法,即由输入实例的k个邻近的训练实例中多数类决定输入实例的类。
4 数据验证及模型评价
为评估不同k值的kNN分类方法的性能,采用准确率(accuracy,ACC)A、正预测值(positive predicted value,PPV)VPPV和真正率(true positive rate,TPR)RTPR作为评估指标,根据径向风场是否存在尾涡,已经KNN分类预测是否存在尾涡可得出该分类的混淆矩阵,如表 3所示[16]。
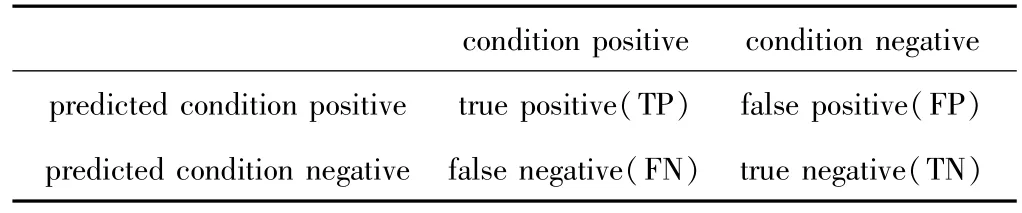
Table3 Confusion matrix
准确率A表示正确识别存在尾涡和不存在尾涡的径向风速场数据占所有数据的比率:

正预测值VPPV实际存在的尾涡的径向风速场数据占识别存在的尾涡的径向风速场数据的比率:

真正率(true positive rate,TPR)RTPR为所有存在尾涡的径向风场数据中,成功识别的比率:

真负率(true negative rate,TNR)RTNR为所有不存在尾涡的径向风场数据中,成功识别的比率:

考虑实际应用中VPPV和RTPR有时差距过大,这里再额外纳入数值F1来综合评估KNN模型的分类性能:

根据第3节中提到的交叉验证法,在实地探测的1273组径向速度场数据中,随机选取30%作为测试集数据,其余70%作为训练集数据,测试得出KNN分类方法不同k值下的性能如图7所示。
训练集性能指标随着k值的增大,总体上呈现的为下降的趋势,而测试集性能指标随着k值的增大,性能指标总体均为先增大后减小,不同k值会显著影响该方法的性能。当k=11时,分类的结果如表3所示。依据分类结果计算分类器的性能,如表4所示。训练集的平均性能指标达到了0.816,其中A=0.796,测试集的平均性能指标达到了0.729,其中A=0.717,按照样本数量对训练集和测试集的加权A达到0.772,效果较好,因此本文中选择的是11NN分类方法。
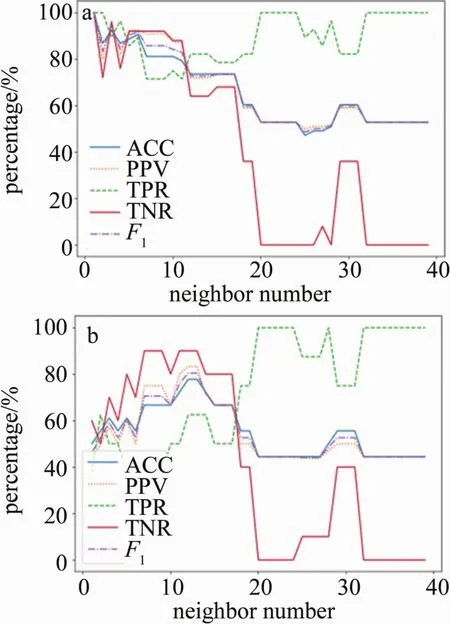
Fig.7 Performance of different ka—performance of train se—performance of test set

Table 3 Results of 11NN classifier

Table 4 Performance of 11NN classifier
作为评估预测与分类性能的指标,受试工作者曲线(receiver operating characteristic,ROC)已被广泛地用于医学以及机器学习等领域。当正负数据发生剧烈变化时候,其它指标也随时会发生较大的变化,而ROC曲线却能接近不变,因此ROC曲线可全面客观地评价模型的性能,AUC(area under curve)是ROC曲线下面积,用于定量的评价分类型性能,能够在一定程度上衡量模型的鲁棒性。本文中提出的KNN的方法很大程度上受限于测试的数据,同样的模型并不一定具有通用性,因此使用ROC和AUC来评价11NN分类方法的通用性能。
图8a是11NN分类器中不同阈值下的实际存在尾涡和实际不存在尾涡的数据概率分布。据此能得到对应的11NN分类器所得到的ROC曲线,如图8b所示,其远离TPR=FPR的虚线,相应的AUC的值为0.855,说明11NN分类器在正负数据发生变化的同时,该分类器的性能不会发生较大的变化,说明11NN分类器具备了较好的鲁棒性,根据上面得出11NN的性能参量,说明本文中提出的方法能够很好地实现对尾涡的预测与分类。
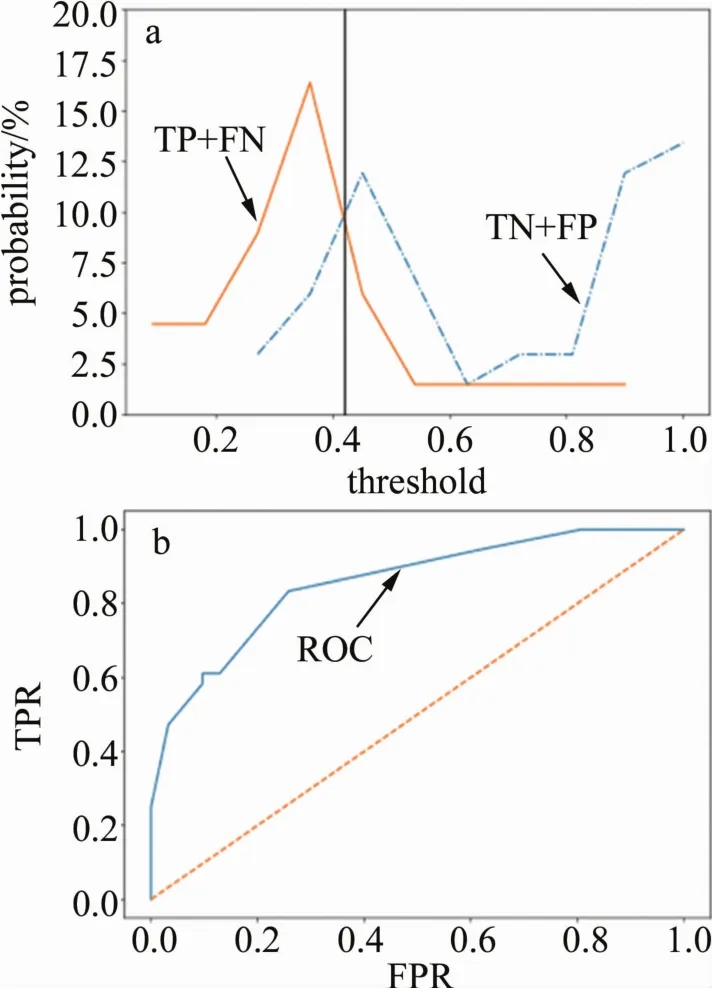
Fig.8 Performance of 11NNa—curve of different threshol—ROC curve
5 结 论
先结合尾涡HB模型和实地探测的尾涡数据,确定飞机尾流所影响的矩形区域,并对脉冲多普勒激光雷达探测到的径向风速场按该区域提取尾涡特征值,该方法优于基于角度或距离的多普勒速度极差特征提取方法。在上述分析基础上,本文中计算比较不同k值下的KNN分类器性能,得到了综合性能最优的11NN分类器,利用11NN分类器对提取的径向风速场进行分类和识别。实验结果表明,本文中所提出的11NN的方法其综合指在75%以上,AUC为0.855。该方法在尾涡预测和识别中具有较高的准确度和较好的鲁棒性。本研究考虑的特征参量还是比较单一,后续工作将考虑更多的特征参量,并对模型进行调整改进。
