基于无人机对高陡边坡危岩体裂缝形状高空测量的方法实验分析与探讨
2020-07-07张翊超

摘 要:无人机以其快速灵活、视角广阔等特点,在地质灾害相关工作中的用途日益显露。其影像的应用方式,是在实际工作中遇到的一个重要问题。本文选用目前较为常用的大疆DJI PHANTOM 4 PRO V2.0无人机及华为M3(BTV-DL09)为实验仪器,对影像数据进行了采集矫正,并得出相应的数据模型。
关键词:地质灾害;无人机;实时测量;成像方式
Abstract: Nowadays unmanned aerial vehicle (UAV) plays an important role in geological disaster monitoring and early warning due to its fast speed, convenient operation and broad perspective. However, in practice, how to use UAV data becomes another important problem. This paper takes the Dajiang PHANTOM 4 PRO V2.0 UAV and Huawei M3 (BTV- DL09) UAV as the main research objects. In this paper, the corresponding data have been collected and corrected, and corresponding data model has been obtained.
Keywords: Geological disasters; UAV; Real-time measurement; Imaging method
0 引言
目前无人机凭借其高位视角,经常应用在高陡边坡的地质灾害应急调查中。在第一现场,可高效采集大量的灾害体、隐患体影像。后期利用自然地物,可大致分析估算受灾体的数学信息。但是在突发地灾应急工作中,经常需要实时对高陡边坡的隐患体进行分析,量测其裂缝的二维数据。但是,仅通过无人机的高空照片或者远距离观测,无法将所需要的信息进行量化。所以,无人机数据的实时量化,还需要深入细致的研究。
随着科技的进步,无人机的操作由繁至简,飞行的时间由短变长,但为了能有更可靠的飞行姿态、更长的飞行时间,更清晰的拍摄图像,无人机的硬件配置、软件开发多向飞控(飞行控制系统)、电池及光电传感器(CMOS)方向傾斜。目前,实时利用无人机影像进行快速反应处理尚处于探索阶段。
本次试验利用无人机及其实时图传系统对野外高陡边坡等难以人工接近的目标进行拍摄获取实时影像,快速确定目标的二维信息;经过现场的计算,可得出目标体的三维特征将数据用于对地质灾害险情的研判预测。
1 实验设备参数与实验环境
(1)实验设备参数
本次实验利用大疆DJI PHANTOM 4 PRO V2.0无人机,华为M3(BTV-DL09)平板电脑为实验平台。其中大疆无人机为四旋翼多轴无人机,最大飞行高度0.5km,最远飞行距离5km,飞行时长30min。无人机配备1英寸的CMOS影像传感器,有效像素2000万,可实时进行1080p的影像传输。拥有前视视觉系统、下视视觉系统,利用GPS可实现精准定位悬停。华为M3平板电脑配备8.4英寸屏幕,分辨率为2560×1600像素。
(2)实验环境
实验利用北京市地质研究所北京突发地质灾害监测站室外场地进行,实验通过无人机实时显示的图传画面,测量目标的长度及宽度。因不同型号的无人机所匹配的镜头不同,不同平板电脑的屏幕大小及分辨率不同,故本实验所得公式如在实际应用时更换使用设备,需要提前对相关系数进行测试调整。
2 实验目的与实验方法
2.1 实验目的
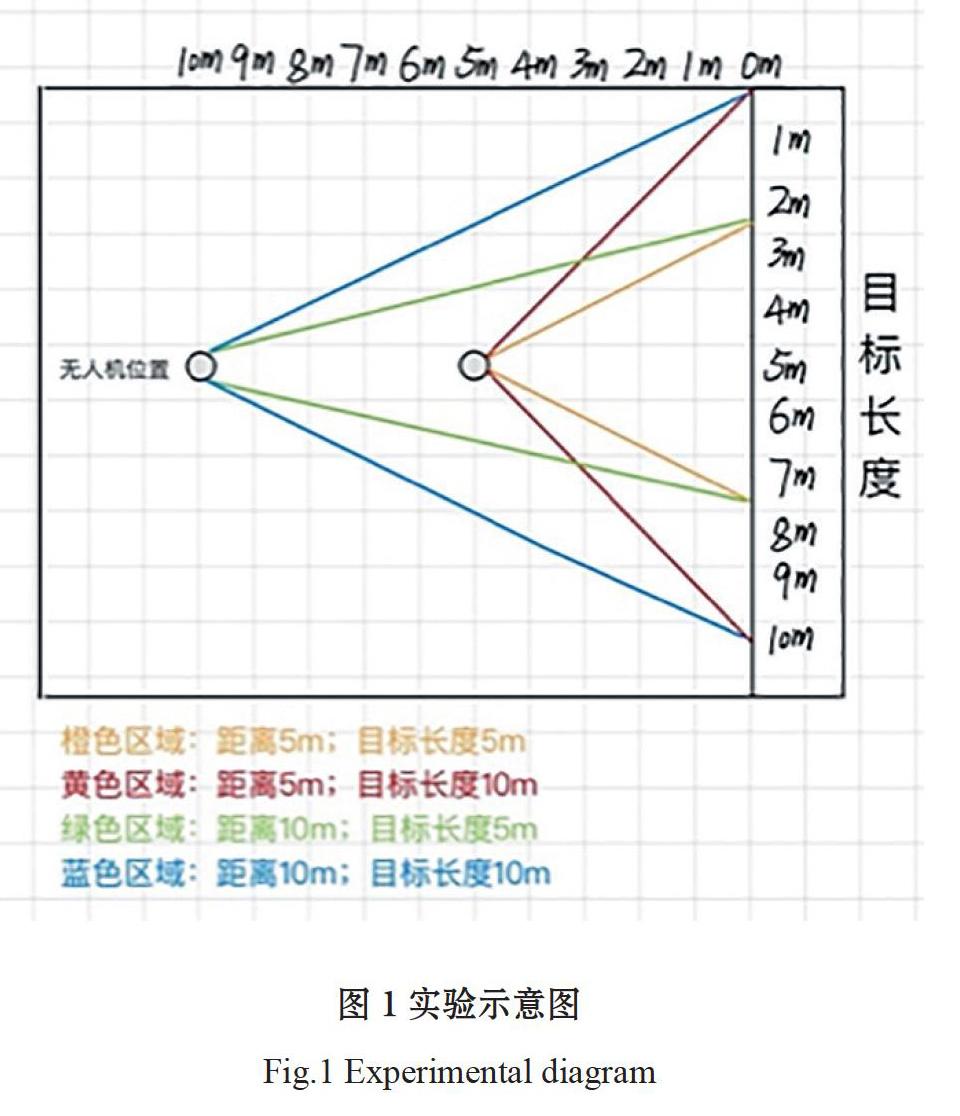
实验基于大疆无人机目前所匹配的前视视觉系统、下视视觉系统、实时图传系统进行。本实验利用无人机自带的前视视觉系统、下视视觉系统进行距离量测。根据所量测的距离,通过实时图传系统和在平板电脑屏幕上所显示的目标物,利用直尺对屏幕图像进行实时量测,并与目标实际距离进行对比分析,得到成像关系公式。在今后的测量工作中,可利用这一成像关系公式,将平板电脑屏幕中显示的图像长度信息转换为实际长度数据(图1)。
2.2 实验方法
(1)无人机视觉传感器测距精度实验
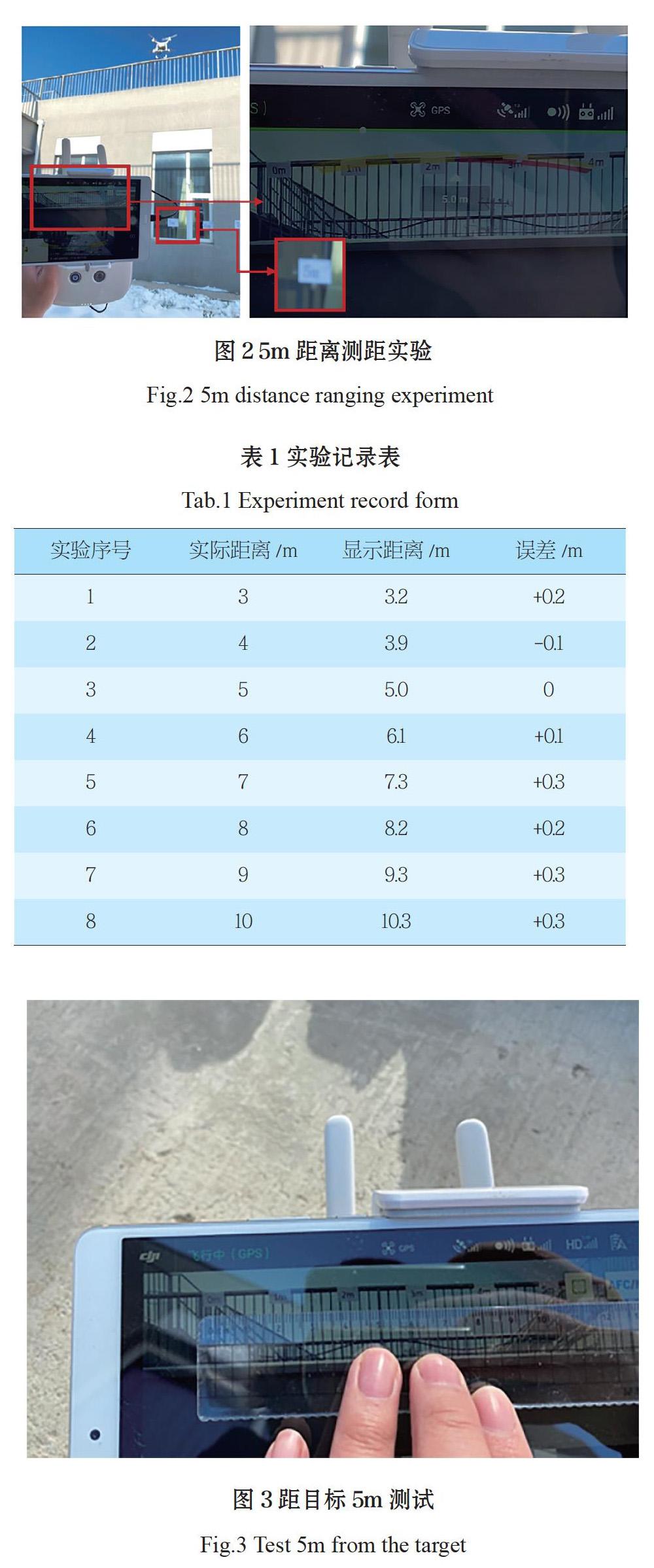
因为确定大疆无人机与目标的距离为实验的数据基础。需保证大疆无人机视觉传感器测量距离的可用性与可靠性。精度校准过程中,共进行了3~10m距离的多次实验,实验记录见图2和表1。根据实验结果,测距误差在±0.3m,对后期距离量测有一定影响,但误差在预期范围内。
(2)目标长度测量实验
利用无人机定焦镜头进行目标长度测试实验,为方便后期对比,进行两组实验,一组为无人机距目标5m测试,另一组为距目标10m测试(因场地限制目标实际距离7m及10m实验在其他场地进行)。实验图片及记录见图3、图4和表2。
3 实验结果与误差分析
高陡边坡的隐患体大部分为坚硬岩石,受植被遮挡较情况较少,易获得直观影像,测距干扰小,应用本实验所得公式有较好的效果。可根据现场所获得影像量测数据代入公式进行演算,所得结果即为实际数据。并根据数据进行下一步的灾害预警、评估等工作。
(1)实验结果分析
利用大疆DJI PHANTOM 4 PRO V2.0无人机及华为M3(BTV-DL09)平板电脑得出的实验结果基本符合预期,为保证后期使用的便利性将所得结果进行整合。根据表3,将目标与无人机的距离设为α,目标的实际长度设为β,目标在所用平板电脑中显示的距离设为γ,μ为调整参数,可获得成像公式:
β=μ·α·γ
根据本实验结果所得数据,实验所使用设备的μ值应取10。
实验所获得的成像公式目前还有较多的限制,限定了使用设备,如设备不同,应按实验方法提前进行测试并对参数μ进行相应调整。
(2)实验误差分析
利用本方法对目标进行量测,误差主要存在于视觉传感器测距精度以及公式的系统当中。根据测试结果,误差可控制在±0.5m以内。基本满足应急调查的需要。
(3)实验结果的应用分析
利用本实验方法,可对野外立面的灾害体特征进行快速的测量,并得到一个相对精确的数量化结果,目前的无人机应用方式大部分是先建模后分析(李德仁,2014;张翊超,2019),所得到的的数据时效性较差。本方法得到的结果,虽然有一定的误差,但较为直观,且不需要经过二次处理,适合小型坡面型地质灾害应用。
在汛期,北京山区的小型崩塌、滑坡等地质灾害发生较多,利用本方法可快速确定目标的二维信息;经过现场的计算,也可得出目标体的三维特征。在汛期可快速进行应用,发挥出无人机的优势。
4 结论
本次实验运用无人机所配备影像传感器和匹配的平板电脑组合,在0~10m范围内,可较为准确的测量无人机与目标的距离。利用此方法,可快速实时测量1000m3以内隐患体的大小和高陡边坡隐患体裂缝的二维信息。得到了现有设备基础上的成像公式,β=μ·α·γ。该方法解决了在野外对高陡边坡等近距离测量的基础问题。根据实验思路,还可以利用高度计对无人机下方目标进行测量,但误差较大,本次不做探讨。
参考文献:
马娟, 张鸣之, 韩冰, 等, 2019.地质灾害无人机调查数据管理云平台建设[J]. 中国地质灾害与防治学报, 30(1):100-105.
李德仁, 李明, 2014. 无人机遥感系统的研究进展与应用前景[J].武汉大学学报(信息科学版), 39(5):503-513,540.
张翊超, 于淼, 韩建超, 2019.浅谈无人机在地质灾害应急调查中的应用:以四渡河滑坡、大石地崩塌调查为例[J].城市地质,14(4):96-99.
