基于状态约束的直流电动机有限时间位置跟踪控制
2020-07-07宋晨刘加朋于金鹏吕振祥
宋晨 刘加朋 于金鹏 吕振祥


摘要
本文提出了一种基于状态约束的直流电动机神经网络自适应有限时间控制方法.首先采用障碍李雅普诺夫函数对直流电动机的状态量进行约束,确保直流电动机的角位置和角速度限制在给定的约束区间内,引入神经网络逼近系统中未知的非线性函数.此外,通过引入有限时间控制技术,提高了系统的收敛速度和控制精度.仿真结果验证了该方法能够实现对直流电动机快速有效的位置跟踪控制.关键词
神经网络自适应控制;直流电动机;有限时间跟踪;状态约束
中图分类号 TM343
文献标志码 A
0 引言
直流电机(direct-current(DC) motor)由于其高效率、启动和调速性能好的特性,在电气伺服传动、国防科技等领域中获得了广泛应用.传统的直流电动机控制是按线性系统处理的,但不能准确表达电机励磁的变化.近年来随着对非线性系统的研究,大量与非线性系统相关的控制理论和控制方法被用以研究直流电机的驱动控制问题,例如反步控制[1]、容错控制[2]、自适应控制[3-4]以及神经网络控制[5]等理论方法.其中自适应技术易与反步法相结合,神经网络自适应反步技术可以用来逼近系统中未测量的非线性摩擦,将传统的神经网络自适应反步法应用于直流电动机的研究中可以满足系统响应的稳定性.但在许多实际工程应用中,系统的控制往往要满足多重控制目标,在保证稳定性的同时要确保安全性和快速性.
在直流电动机的伺服系统中,系统的状态量需要被限制在合理的范围内,超出约束范围可能使系统性能退化,出现故障,甚至威胁人身安全.因此,在直流电动机的角速度和角位置控制中考虑状态约束问题,确保了系统控制的安全性.文献[6]研究了一类严格反馈的非线性系统跟踪控制问题,采用障碍将系统的输出进行受限,使其限制在给定的范围内.文献[7]将输出受限扩展到全状态受限,对电机系统的状态量进行了约束,使所有状态量都保持在预先定义的状态空间内.
有限时间控制技术[8-11]具有响应快、收敛时间短和抗干扰能力强的优点,将有限时间控制技术运用到跟踪控制中可以达到显著的效果.直流电动机在某些特定场合要求实现实时控制,系统必须在短时间内达到稳定状态,所以有限时间稳定性理论得到了发展.文献[12]提出了纯反馈系统的自适应模糊有限时间技术,实现了在有限时间内准确跟踪参考轨迹.文献[13]将有限时间控制技术和命令滤波技术相结合,对电机位置跟踪控制进行了研究,提高了系统的收敛速度和干扰抑制能力.
基于以上分析,本文提出了一种基于状态约束的神经网络自适应有限时间直流电动机控制技术,通过采用神经网络自适应技术逼近系统中未知的非线性函数,在保留自适应神经网络反步法的优点的基础上,引入有限时间技术提高了系统的收敛速度,利用障碍李雅普诺夫函数将直流电动机的状态变量进行了约束.与现有的技术相比,本文提出的控制方法,主要的优点在于:
1)与文献[14]中状态约束的神经网络自适应控制技术相比,本文引入有限时间控制技术使系统的收敛速度显著提高;
2)采用障碍李雅普诺夫函数约束状态变量幅值,使直流电动机的状态始终在预先定义的约束状态空间中,确保了系统的安全性.
4 对比实验研究
为了验证上述所提出的基于状态约束的神经网络自适应有限时间控制技术在直流电动机控制系统中的有效性,在MATLAB环境下进行了仿真,直流电动机的数学模型中电机及负载参数如下:
J=0.014 3 kg·m2,B=0.938 5 Ν·m/(rad/s).
RBF-NN中神经网络θT22(z2)包含11个节点,中心在[-9,9]内均匀分布,分区点选择为:9,7,5,3,1,0,-1,-3,-5,-7,-9.
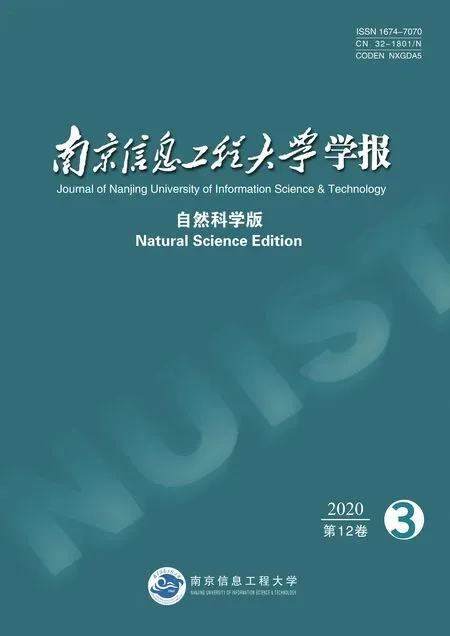
仿真是在直流电动机零初始状态下进行,给定期望跟踪信号为xd=0.5sin(t).
1)考虑系统的控制性能,基于状态约束神经网络自适应有限时间控制器设计参数如下:k1=5,k2=6,m=3.3,l=0.8,kb1=0.2,kb2=0.6.直流电动机的状态被限制在|x1|≤0.7,|x2|≤0.9.
2)采用未考慮有限时间的状态约束神经网络自适应控制器[14]与本文提出的方法进行仿真对比.
两种方法选取一样的控制器参数和电机参数.
仿真结果如图1—7所示.
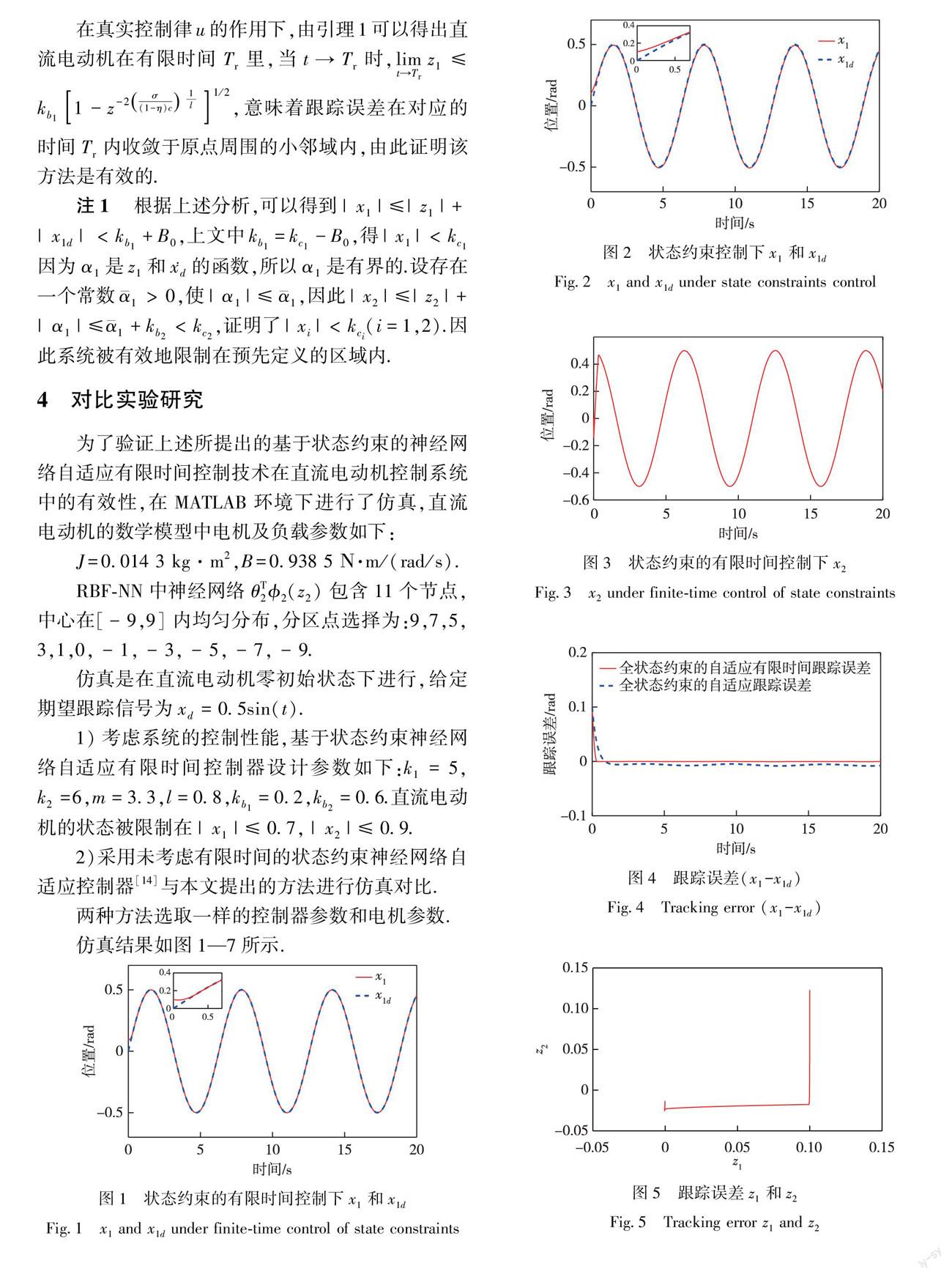
图1为在状态约束的有限时间控制下的仿真结果,图2为在状态约束控制下的仿真结果.对比图1和图2可得,有限时间技术明显提高了系统收敛速度.图3表明x2的有界性,图1和图3中的状态变量均被限制在紧集内.系统在两种方法控制下的位置跟踪误差波形对比如图4所示,引入有限时间控制技术后直流电动机位置跟踪误差更小.图5为z1和z2的波形,表明其被约束在紧集Ωz={|z1|≤0.2,|z2|≤0.6}中.图6为图1控制方法下电压u的波形,由图6可知,u的值都稳定在一定范围内.图7表明自适应律是有界的.
注2 与文献[14]提出的控制技术对比,本文引入了有限时间控制技术,加快了系统的收敛速度,减小了系统的跟踪误差.因此,本文提出的方法更适用于实际应用工程中.
5 结论
本文提出基于状态约束的神经网络自适应有限时间直流电动机控制方法,实现了对直流电动机快速跟踪控制.相较于传统的神经网络自适应控制器,本文提出的基于有限时间技术和障碍李雅普诺夫函数的控制器使直流电动机在保证所有状态量都保持在约束状态空间内的同时,缩短了系统收敛时间,改善了对输出信号的跟踪性能.
参考文献
References
[1]
胡建辉,邹继斌.具有不确定参数永磁同步电动机的自适应反步控制[J].控制与决策,2006,21(11):1264-1269
HU Jianhui,ZOU Jibin.Adaptive backstepping control of permanent magnet synchronous motors with parameter uncertainties[J].Control and Decision,2006,21(11):1264-1269
[2] Li H Y,Gao Y B,Wu L G,et al.Fault detection for T-S fuzzy time-delay systems:delta operator and input-output methods[J].IEEE Transactions on Cybernetics,2015,45(2):229-241
[3] 于金鹏,陈兵,于海生,等.基于自适应模糊反步法的永磁同步电机位置跟踪控制[J].控制与决策,2010,25(10):1547-1551
YU Jinpeng,CHEN Bing,YU Haisheng,et al.Adaptive fuzzy backstepping position tracking control for permanent magnet synchronous motor[J].Control and Decision,2010,25(10):1547-1551
[4] 于金鹏,于海生,林崇.考虑铁损的异步电动机模糊自适应命令滤波反步控制[J].控制与决策,2016,31(12):2189-2194
YU Jinpeng,YU Haisheng,LIN Chong.Fuzzy approximation-based adaptive command filtered backstepping control for induction motors with iron losses[J].Control and Decision,2016,31(12):2189-2194
[5] Wang F,Chen B,Lin C,et al.Adaptive neural network finite-time output feedback control of quantized nonlinear systems[J].IEEE Transactions on Cybernetics,2018,48(6):1839-1848
[6] Tee K P,Ge S S,Tay E H.Barrier Lyapunov Functions for the control of output-constrained nonlinear systems[J].Automatica,2009,45(4):918-927
[7] Fu C,Yu J P,Zhao L,et al.Barrier Lyapunov function-based adaptive fuzzy control for induction motors with iron losses and full state constraints[J].Neurocomputing,2018,287:208-220
[8] 沈艷军,刘万海,张勇.一类非线性系统全局有限时间观测器设计[J].控制理论与应用,2010,27(5):668-674
SHEN Yanjun,LIU Wanhai,ZHANG Yong.Global finite-time observers for a class of nonlinear systems[J].Control Theory & Applications,2010,27(5):668-674
[9] Yu J P,Zhao L,Yu H S,et al.Fuzzy finite-time command filtered control of nonlinear systems with input saturation[J].IEEE Transactions on Cybernetics,2018,48(8):2378-2387
[10] Lu K F,Xia Y Q.Adaptive attitude tracking control for rigid spacecraft with finite-time convergence[J].Automatica,2013,49(12):3591-3599
[11] Zhao L,Jia Y M.Finite-time attitude tracking control for a rigid spacecraft using time-varying terminal sliding mode techniques[J].International Journal of Control,2015,88(6):1150-1162
[12] Wang F,Chen B,Liu X P,et al.Finite-time adaptive fuzzy tracking control design for nonlinear systems[J].IEEE Transactions on Fuzzy Systems,2018,26(3):1207-1216
[13] Yang X T,Yu J P,Wang Q G,et al.Adaptive fuzzy finite-time command filtered tracking control for permanent magnet synchronous motors[J].Neurocomputing,2019,337:110-119
[14] Bai R.Neural network control-based adaptive design for a class of DC motor systems with the full state constraints[J].Neurocomputing,2015,168:65-69
[15] Wang Z H,Yang B,Cheng L,et al.Robust adaptive deadzone compensation of DC servo system[J].IEE Proceedings on Control Theory and Applications,2006,153(6):709-713
[16] Qian C J,Lin W.Non-Lipschitz continuous stabilizers for nonlinear systems with uncontrollable unstable linearization[J].Systems & Control Letters,2001,42(3):185-200
[17] Huang X Q,Lin W,Yang B.Global finite-time stabilization of a class of uncertain nonlinear systems[J].Automatica,2005,41(5):881-888
State constraints-based finite-time position tracking control for DC motor
SONG Chen1 LIU Jiapeng1 YU Jinpeng1 L Zhenxiang1
1 School of Automation,Qingdao University,Qingdao 266071
Abstract A neural networks-based adaptive finite-time position tracking control method for DC motor with state constraints is proposed in this paper.Firstly,the barrier Lyapunov function (BLF) is introduced to constrain the state variables of DC motor,which ensures that the angular position and angular speed of motor are limited within the given constraint range,the neural networks are used to approximate unknown nonlinear functions in the system.In addition,the finite-time control technology is introduced to improve response speed and convergence speed of the system.The simulation results show that the control method can achieve fast and effective tracking control of DC motor.
Key words neural network adaptive control;DC motor;finite-time tracking;state constraints
收稿日期 2020-01-12
資助项目 国家重点研发计划(2017YFB1303503);国家自然科学基金(61973179,61573204);泰山学者工程专项经费(TSQN20161026)
作者简介
于金鹏(通信作者),男,博士,教授,博士生导师,主要研究方向为电机控制和非线性控制.yjp1109@126.com