非自治混沌系统在事件触发控制下的同步
2020-07-06张露露蔡建平
张露露,蔡建平*
(1.闽南师范大学数学与统计学院,福建漳州363000;2.数字福建气象大数据研究所,福建漳州363000)
1990年,Pecora等[1]从电路实验上发现了两个耦合混沌系统可以同步,之后混沌系统的同步受到了各个领域的广泛关注.到目前为止,针对混沌系统的同步问题,人们提出了多种基于Lyapunov稳定性理论的控制方法.其中,事件触发控制要求在测量误差的变化达到设定的阈值时,控制器才进行更新.由于其能减少不必要的信息传输,事件触发控制得到了广泛研究[2-3].
Heemels等[4]研究了基于事件触发机制的受扰线性系统的稳定,为事件触发控制的应用提供了重要的理论依据.主要思想是只有当被控对象的状态超出对象空间原点的集合时才进行采样,更新控制输入.Zhang等[5]提出了使线性系统最终一致全局有界的事件触发条件,并给出在这种事件触发条件下最短触发间隔.另外,Ma等[6]利用Lyapunov稳定性理论和线性矩阵不等式(LMI)理论,共同设计了事件发生器和动态输出反馈控制器来实现线性时不变系统的稳定.
截至目前,在事件触发控制下线性系统的稳定性问题已经得到了充分的研究,但是很少有关于混沌系统在事件触发控制下同步问题的研究.Liu 等[7]研究了有传输时滞的Lur’e 系统的混沌同步,得到基于事件触发机制的控制器的设计方法.本文在此方法的基础上,通过共同设计事件触发条件和控制增益,研究了非自治驱动-响应系统在事件触发控制下的混沌同步,证明了事件触发时间有最短时间间隔.最后以陀螺仪系统为例,验证了上述方法的可行性.
在本文中,符号说明如下:

1 系统描述和动态事件触发条件设计
考虑非自治混沌系统:
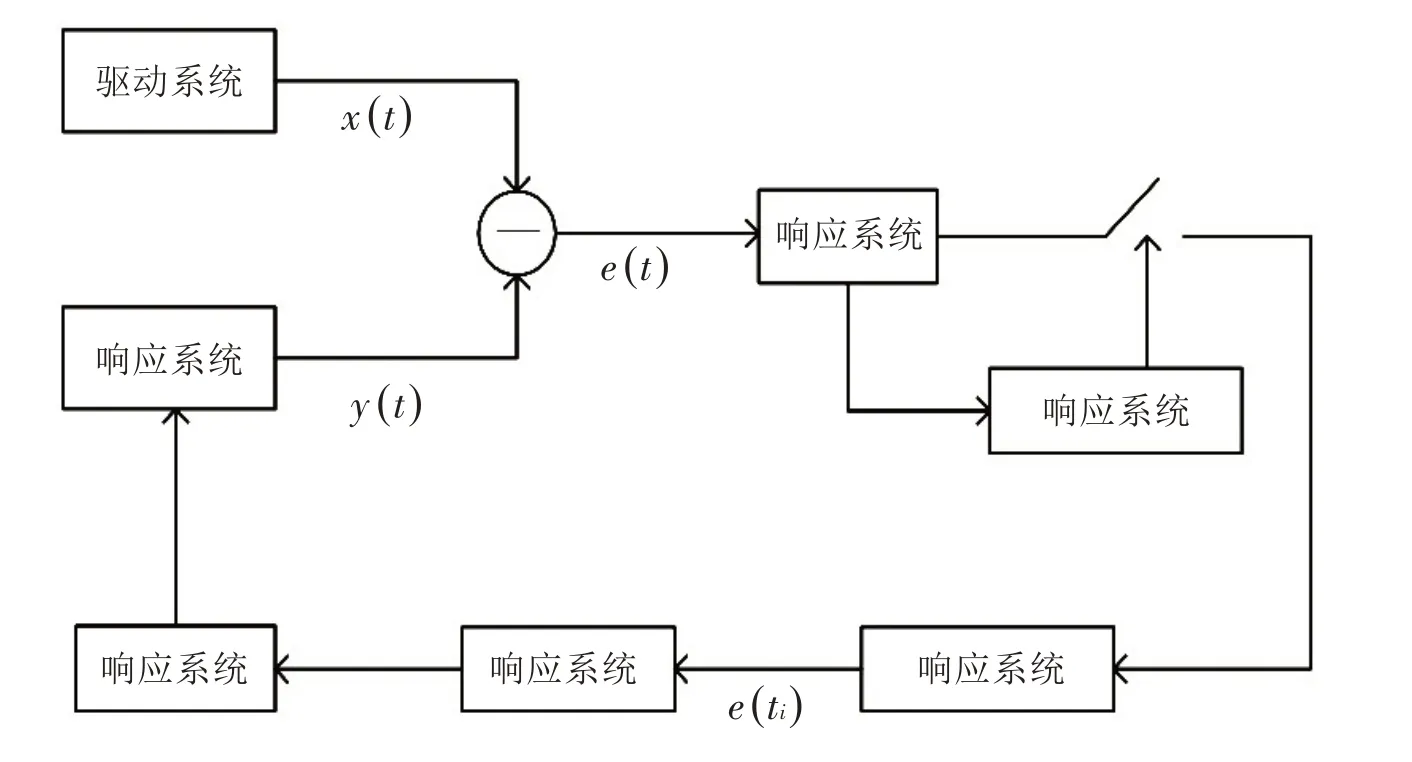
图1 事件触发控制的驱动-响应系统同步的框架图Fig.1 The diagram of driver-response systems synchronization underthe event-triggered control

图2 事件触发机制下误差系统的算法结构图Fig.2 The algorithm graph of the error system under event-triggered control
观察图1 可知,相对于一般控制器,事件触发控制在传感器和控制器之间引入了事件检测器,事件检测器被用来检测当前时刻的同步误差与上一个传输时刻输出的同步误差的变化范围,只有在当前时刻的同步误差超出了规定的范围才会传输给控制器,称这一时刻为触发时刻,定义为tk.由于零阶保持器的存在,控制器会一直保持上一个触发时刻tk的信息直到下一个触发时刻tk+1到来.不失一般性,假设t0= 0,且定义传输时刻满足

其中σ >0为待设计的参数,z(t)= e(tk)- e(t),k为自然数.
注:根据传输时刻的定义(6)可知,当zT(t)z(t)>σeT(t)e(t)时,更新控制器的控制输入;否则,不输出同步误差.也就是当t ∈[ )tk,tk+1时,控制器一直保持tk的信息.因此,误差变量的传输频率与参数σ的取值有关,σ越大,误差变量的传输频率越低.
事件触发控制器u( t )设计如下

其中K 为待设计的控制增益矩阵.另外,u( t )= K(z(t) + e(t)),将其代入式(5),得到如下误差系统

2 事件触发条件和控制增益的共同设计
定理1不妨假设存在正定矩阵P和矩阵Y,使得线性矩阵不等式

时,闭环控制系统进行事件触发,控制信号进行更新.
证明 取Lyapunov函数

其中P为正定对角矩阵.将V(t)沿着式(8)的轨迹求导,则有

根据式(4)可知

根据式(10),可得

定理1从误差系统的状态变量出发共同设计了事件触发条件和控制器的控制增益,然而事实上,可能由于Zeno行为的发生影响定理1给出的事件触发条件和同步判据的可行性,因此事件触发条件的实现和应用要求相邻两次触发时刻所构成的触发时间间隔有确定的下界,从而避免有限时间内的无限次触发的发生.根据文献[8]可以得到定理2,证明在定理1满足的条件下,两次触发间隔存在明确的下界.
定理2考虑式(7)和式(8),式(10)所确定的触发时间间隔存在一个正下界τ,即τ ≥tk+1- tk,∀k ∈Z+.

3 数值仿真
考虑陀螺仪系统[9]
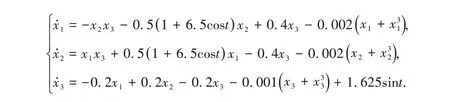
根据文献[9]可知,上述陀螺仪系统呈现出混沌行为,如图3.
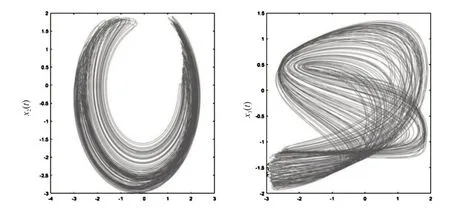
图3 陀螺仪系统的相位图Fig.3 The phase diagram of the gyroscope system
利用事件触发控制,建立如下响应系统

其中tk定义式(6),其它条件不变,误差变量满足

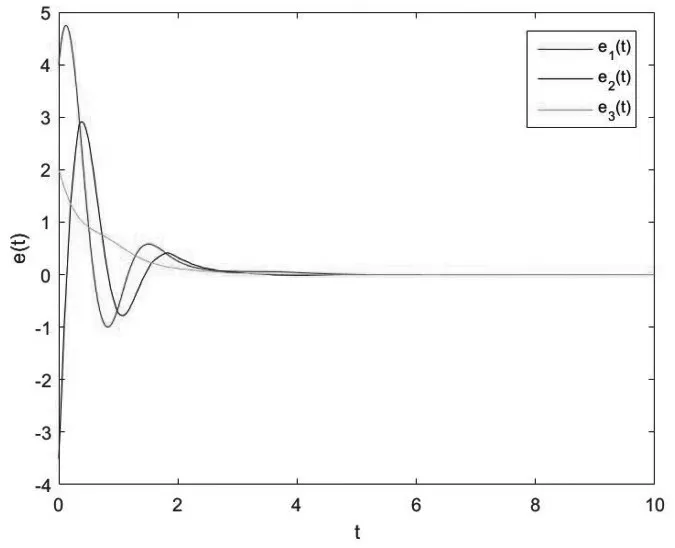
图4 陀螺仪系统的同步误差轨迹Fig.4 The synchronization error trajectory of the Gyroscope system
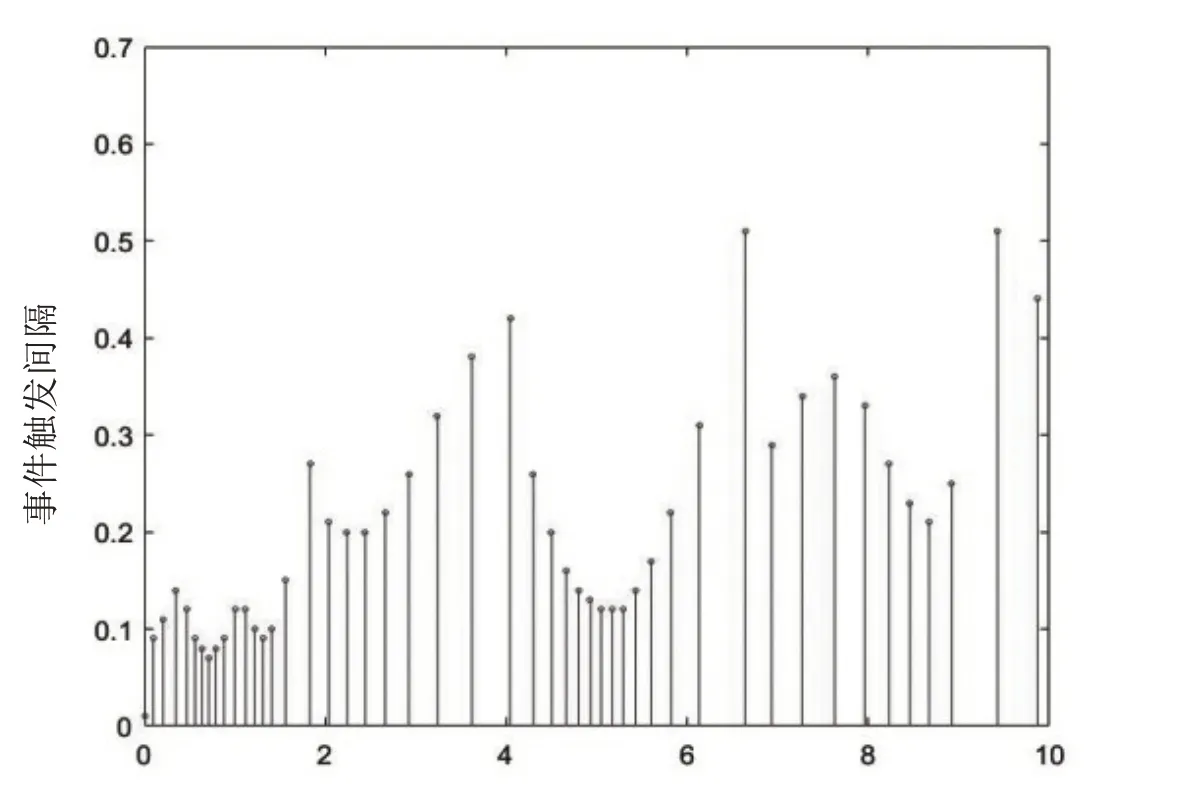
图5 事件触发时刻和触发间隔Fig.5 Event trigger time and trigger interval
通过计算可知,系统的平均采样时间为0.17 s,是无事件触发采样时间(采样步长为0.02 s)的8.5倍.也就是说,当引入事件触发条件后,驱动-响应系统在能达到同步的前提下节约系统资源的使用,减少资源的浪费.
4 结论
本文基于Lyapunov稳定性定理,通过共同设计事件触发条件和控制增益,得到了非自治驱动-响应系统达到混沌同步的线性矩阵不等式形式的充分条件,证明了相邻两次事件触发时间间隔存在下界.最后以陀螺仪系统为例,验证了事件触发控制下非自治混沌系统实现同步的可行性.
