硅基集成激光雷达技术
2020-07-06
(中国科学院半导体研究所,北京100083)
(Institute of Semiconductors, Chinese Academy of Sciences, Beijing 100083, China)
激光雷达俗称LiDAR,是一种使用激光脉冲来测量障碍物距离的传感技术。早先激光雷达仅限于政府和军事应用,随着技术的进步和激光雷达制造成本的降低,它广泛地渗透到工业和商业领域。这项技术可以快速、准确识别前方障碍物目标,已成为无人驾驶、无人机、智能机器人等领域的关键传感技术,近年来吸引了众多科研人员及高科技公司的关注。根据最新报告显示,2022年全球激光雷达市场规模预计将达到52亿美元,2017—2022年间年均复合增长率将达25.8%。法国市场研究与战略咨询公司Yole Development表示,汽车应用激光雷达市场增长趋势将持续到2032年,届时市场将达到280亿美元。
目前,基于机械式的激光雷达虽然较为成熟,但因体积大、价格高、调试装配复杂、机械部件寿命短等特点,大规模应用受到限制。另一种是利用微机电系统(MEMS)的激光雷达,它会把所有的机械部件集成到单个芯片,利用半导体工艺生产。它可以取消机械旋转结构,是降低激光雷达成本的一种方式,属于“混合固态”式。该激光雷达光路复杂,扫描效率受微振镜面积限制,且测试结果重复性难以保证。另外,MEMS环境适应性相对较差,不易通过车规标准,还不能大规模应用在无人驾驶等领域。
纯粹的固态LiDAR主要有相控阵激光雷达、Flash激光雷达和基于时间飞行原理(TOF)相机3种。它们都没有机械运动部件,可以称之为固态LiDAR。Flash激光雷达和TOF相机在功耗、探测距离等方面局限性很大,需要较高的激光能量(一般需要固体激光器或多个半导体激光器的阵列),光功率很大,可能伤到人眼。
相控阵激光雷达主要利用光学相控阵(OPA)技术来实现光束扫描。激光光源经过光分束器后进入光相位控制阵列,通过在相位控制阵列上外加控制的方式改变光波的相位,利用光波相位差来实现光束扫描,其原理类似于多缝干涉。与机械式扫描技术相比,OPA作为新型的光学扫描技术具有尺寸小、指向灵活、扫描速度快、功耗低、成本低、精度高等优点。硅基最大的优点是雷达所需要的电驱动芯片、算法处理及成像芯片,甚至探测都可以利用硅基成熟的微电子技术来实现单片集成;因此,硅基光学相控阵激光雷达是近年最前沿的研究热点之一。硅基相控阵激光雷达就是将光源、光分束器、相位调制器、光转束器、探测器等集成在几平方毫米的区域,快速识别远方目标。近几年,有很多关于利用硅基光子集成技术制作相控阵激光雷达发射天线的报道。众多研究机构和高技术公司如麻省理工学院(MIT)、加州大学圣塔芭芭拉分校(UCSB)、英特尔(Intel)、根特大学、哥伦比亚大学、Analog Photonics、Voyant Photonis和中科院半导体研究所等,都已开展相关研究并取得不错的成果[1-15]。我们预测,硅基激光雷达的成本将降到几十美元。凭借价格的优势,这种高性能全固态激光雷达的革新势必能推动工业自动化、机器人、无人机及虚拟现实等跨越式发展,市场潜力巨大。
除了硅基相控阵技术实现的激光雷达外,另外一种基于硅基光开关阵列实现的激光雷达技术也逐渐被越来越多的研究者所关注。所述的硅基光开关阵列激光雷达是通过将激光器发射的光经过硅基上的光开关阵列传输到特定位置的光学天线,并配合天线上方设置的透镜实现光束偏转。其中,透镜位于光学天线上方一倍焦距处。根据焦平面定理,空间中不同方向的平行光经过透镜会在焦平面上汇聚,也就是聚焦到特定位置的光学天线上。相较于硅基相控阵技术,这种架构的硅基激光雷达实现起来更加简单,只需要将级联的光开关打开或关闭即可,不需要多路联调。配合透镜,等效的天线口径远大于硅基相控阵形式的激光雷达,这更利于信号光的发射和探测。目前,此架构的硅基激光雷达技术已经被很多研究单位所验证,例如雅典大学、哥伦比亚大学、MIT、上海交通大学和日本横滨国立大学等都已取得初步成果[16-20]。其中,日本横滨国立大学通过采用特殊透镜,实现了40°× 4.4°的二维扫描,并且光斑发散角小于0.15°。这个结果已经可以和512通道的硅基相控阵激光雷达相媲美,但是实现方式却极其简单。
综上所述,各种形式的激光雷达具有各自的特点,表1对比了上述各种激光雷达的性能差异。下面我们详细介绍全球硅基相控阵激光雷达和硅基光开关阵列激光雷达的研究情况。
1 硅基相控阵激光雷达
相控阵激光雷达主要利用光束间的相位差来控制光束方向。相比于传统的机械光束扫描装置,相控阵激光雷达极大地减小了尺寸,降低了能耗,常用来实现光控相控阵的材料有铌酸锂、液晶、压电陶瓷。铌酸锂制作的相控阵主要利用普克尔效应和克尔效应,实现电场对光波导相位的调控。光束扫描的速度很快,可达皮秒量级;但操作电压高,功耗非常大,扫描角度较小。此外,相对较大的相移器间隔、小的孔径填充因子和较大的插入损耗也阻碍了它的发展。液晶技术的优点是所需驱动电压较低、功耗小、使用寿命长、扫描角度较大;缺点是热稳定性差,工作波长范围受限制且响应速度较慢,响应速度通常为毫秒量级。压电陶瓷电光系数大、透射光谱宽、损耗低且价格便宜,利用压电陶瓷实现光控扫描速度较快,一般为纳秒量级;但是所需的工作电压非常高(约为1 kV)且造价较高,不适合民用。

表1 不同形式激光雷达性能对比
随着硅基光电子集成技术的迅猛发展,硅基光子学技术已被广泛研究,在一个芯片上可以集成成千上万个光电子器件。利用硅基光电子集成技术制作的器件,工作在光通信波段,可以与光纤网络直接互联。相比于传统的工作在可见光波段和近红外波段的器件,此工作波段处于人眼安全的范畴(1.4~2.0 μm),有利于光控相控阵的产品进入民生领域。同时,硅基光电子技术与集成电路技术完全兼容,可在单片上同时集成光束扫描器件与电控制逻辑电路,有利于实现智能化控制和神经网络集成等。
随着互补金属氧化物半导体(CMOS)工艺的成熟,越来越多的OPA相关研究将焦点放在基于绝缘衬底上的硅(SOI)的OPA上。2009年,根特大学的K. VAN ACOLEYEN等报道的一维光学相控阵如图1(a)所示[1],该相控阵通过热光调谐来改变相位。由于采用的是移相器整体加热的方法,扫描角度较小,在1 550 nm波长下的扫描角度仅为2.3°;但波长调谐实现的扫描角度为14.1°。2010年,该课题组在之前研究的基础上又报道了基于波长调谐的二维光学相控阵[2],实现了0.24°/nm的转向速度,天线损耗小于3 dB。2011年,基于热光调谐的16个阵元的光学相控阵被提出,具有23°的视场范围,同时通过减小波导间距可以有效增加视场范围[3]。
2011年,加州大学的 J. K.DOYLEND等同样采用了波长调谐和移相器单个加热的方式,制备了16通道的二维转向光相控阵列[4],如图1(b)所示。该方式在调相的方向上实现了20°的扫描角度,调波长时实现了14°的扫描角度,远场分辨率小于1°,背景抑制比超过10 dB。
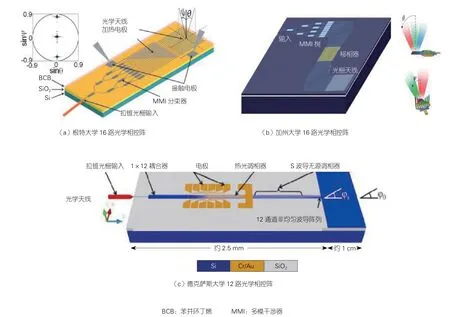
▲图1 所报道的各硅基光学相控阵芯片示意图
对于周期性的波导光学相控阵来说,由于相邻波导之间拥有相同的相位差,在远场干涉时容易出现旁瓣,造成主瓣能量损失、波束展宽,影响波束扫描效果。2011年,德克萨斯大学的D. KWONG等首次报道了一种如图1(c)所示的非周期性的OPA结构[5]。该结构输入端经过1×12的多模干涉器(MMI)耦合进入不等间距的直波导,通过热调的方式实现调相,在远场不同方向上发生干涉,从而实现波束扫描。这样一来,热光调谐单元后还有时延线,可以补偿非等间距波导所引入的相位差,从而使得在不加热的情况下,不会发生波束的偏转。
2013年,MIT在SOI上实现成像用大规模二维光学光相控阵[6],如图2(a)所示。该器件采用直接给硅波导加热的方式进行热光调制,加热效率较高。另外,该相控阵列的64×64(4 096)个纳米天线均集成在一块硅芯片上,实现最大规模二维OPA;器件的尺寸却只有576 μm×576 μm。但由于阵元密集、量大,电调谐扫描仅在8×8上展示,扫描角度较小。
2014年,MIT的 A.YAACOBI等人采用两侧浅刻蚀的光栅天线和直接给硅波导加热的方式[7],研制出了51°的大扫描角度OPA。器件最大电压信号为10.6 V时,每个天线只消耗18 mW的能量,具有100 kHz的扫描速度。该系统可在波长范围1.2~ 3.5μm内工作。
2016年,MIT的C.V. POULTON等采用分组级联移相器的方式来补偿相位噪声,减少控制电极的数量[8],从而设计出了小光束宽度、大转向范围的OPA。如图2(b)所示,该器件采用了三级级联,包含50个光栅天线,器件尺寸为1 200 μm×200 μm,光束宽度为0.85°×0.18°。在加热功率为1.2 W下,波长从1 454~1 641 nm调谐时,器件的扫描范围可达46°×36°。
2016年,Intel公司的Hutchison等人采用一维非等间距光栅和浅刻蚀光栅天线的方式,实现了迄今转向角最大的一维高分辨率OPA[9]。调相时其扫描角度为80°,可分辨500个点,波长调谐方向则可实现17°的光束扫描。二维扫描时可分辨6 000个点,两个方向上的发散角均为0.14°,器件结构如图2(c)所示。
在OPA的研究中,改善光栅天线的性能一直是研究的重点之一。增加单根光栅天线上的有效光栅数量,能有效改善波长调谐方向的光束发散特性。2018年,哥伦比亚大学的Moshe等在硅波导上引入了氮化硅(光栅齿采用氮化硅材料),如图2(d)所示[10]。该方法利用SiN-Si对光扰动作用小的特性(相比于Si-SiO2结构),将单根光栅天线的有效口径延长至1 mm,有效增加了单根光栅天线上的有效光栅数量,从而使波长调谐方向上的发散角降低到0.089°。
电光混合集成在同一个芯片上能大大缩小器件的整体尺寸,同时能提升器件的整体性能,这是硅基光子集成技术发展的一个重要趋势。2018年,南加州大学S. WON等报道了控制电路和光路混合集成在同一个芯片上的大规模OPA[11],如图3(a)所示。该器件采用180 nm CMOS工艺,在5.7 mm×6.4 mm的芯片上制作了1 024路波导光栅、1 192个移相器、168个衰减器、136个数模转换器和其他电学或光学元器件。该OPA能达到0.03°的分辨率。

▲图3 所报道各硅基光学相控阵芯片示意图
2018年,美国MIT的M. R. WATTS团队在之前工作的基础上,报道了512路OPA芯片[12],实现了25 m探测距离,并对所提出的激光雷达芯片进一步改进,于2019年实现了接近200 m的测距。该实验成果是硅基相控阵激光雷达实用性的极有利证明,其芯片结构及探测性能如图3(b)所示。该硅基相控阵激光雷达采用双层SiN结构的天线实现了超过90%的定向发射、10 ns调相上升沿的调相速率、低至2 uW的2π调相功耗,扫描范围达到了56°×15°。
进一步地,M. R. WATTS和加州大学伯克利分校的V. STOJANOVIC团队联合提出了硅基OPA芯片和CMOS驱动电路的三维集成[13]。其具体方式是采用氧化层通孔技术,将倒扣的硅基OPA芯片与对应的CMOS驱动电路垂直互联,如图3(c)所示。通过这种集成封装的形式,可以大大减小整个激光雷达的体积,使其更容易被镶嵌在特定应用场景的对应设备上。
2019年,UCSB报道 了240路OPA芯片[9],如图3(d)所示。该芯片采用SiN/Si双层结构光栅作为光学天线,该光栅可实现厘米量级的有效天线口径,使光斑发散角达到0.02°。另外,该芯片采用ⅢⅤ-Si混合的集成调制器,并可以将调制速率提高到1 GHz,调制功耗小于3 nW,而只引入0.1~0.5 dB的损耗。
2020年1月,美国哥伦比亚大学的M. LIPSON团队报道了最新的512路估计OPA芯片[14],如图3(e)所示。该芯片采用一种对多次光循环波导进行加热的热光移相器结构,使得在很小的芯片范围内,使用很低的功耗就可实现π相移。具体地,通过一系列回旋的波导结构,使得波导中激光的模式从横电(TE0)不断变化到TE6,并再从TE6变化到TE0后输出。在此变化过程中,激光不断经过加热区域,从而使得加热效率提高了接近9倍。这是目前所报道的功耗最低的热光调相方式,具体调相功耗为1.7 mW/π,并且其OPA芯片实现了70°×6°的二维扫描。
中国对硅基光学相控阵的研究起步相对较晚,主要的高校和科研机构有中国科学院半导体研究所、上海交通大学、北京大学、清华大学、浙江大学等,它们基本上都是从2016年以后相继开展相关研究,与其他国家有着5年以上的差距,所研制光学相控阵芯片也处于原理验证及各分立器件优化阶段,性能上也有很大差距,尤其是在角分辨率、扫描速度、探测距离等方面。其中,本研究团队从2017年开始着力于硅基OPA芯片的开发,目前已取得了较大进展,在中国处于领先水平。本团队提出了氮化硅-硅双层OPA芯片[15],如图4所示。该芯片结合了硅的优良调制特性和氮化硅的低损耗特性,大大提高了单层硅光学相控阵的性能,并采用独创的整体型光学天线实现了96°的扫描范围。
2 硅基光开关阵列激光雷达
由于硅基相控阵激光雷达具有较高的技术门槛,近几年越来越多的团队开始研究一种新型的硅基激光雷达形式——硅基光开关阵列激光雷达。该形式的激光雷达同样是全固态的,没有任何机械运动部件,并且工作方式极其简单,是一种性价比较高的激光雷达方案。
2018年,雅典大学的C.CHAINTOUTIS等提出了基于芯片上不同位置光学天线加透镜的形式实现光束转向[16],如图5(a)所示。该方式虽然是在InP平台上实现的,却开创了该形式激光雷达的先河。不同位置的光学天线发射的光束经过上方的透镜可以实现不同方向的光束偏转。区别于OPA方案,该方案不需要多路联调光相位,只需要将光束在片上切换至特定位置的天线即可。该方案工作方式简单,且不需要很大规模的驱动电路。
同年,美国MIT的S. A. SKIRLO等在SiN平台上实现了二维扫描[17],如图5(b)所示。该芯片独特的将透镜设置在片上并位于一个整体光学天线前端。通过前端光开关阵列将光在片上切换至不同位置,并经过片上的透镜实现一维转向,然后当光经过后端整体光学天线时,改变波长,可以实现另外一个维度的光束转向。两个方向的扫描相结合,最终实现了38.8°×12°的二维扫描。
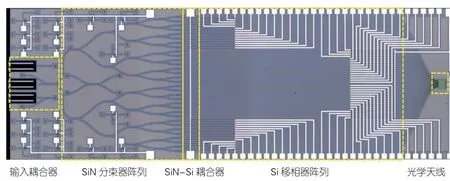
▲图4 氮化硅-硅双层光学相控阵芯片
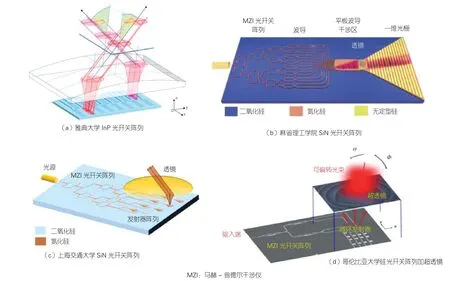
▲图5 所报道各硅基光开关激光雷达芯片示意图
2019年,上海交通大学的陈建平团队在SiN平台上制备了基于光开关阵列的4×4天线阵列[18],如图5(c)所示。该天线阵列原理性验证了光开关阵列加透镜形式的激光雷达芯片的可行性。
除了以上所述的常规光学透镜之外,我们也可以采用一些其他形式的透镜来实现。2019年,哥伦比亚大学M. LIPSON团队提出了基于光开关网络加超透镜的激光雷达芯片[19],如图5(d)所示。所提出的4×4阵列制备于顶硅220 nm的SOI衬底上,实现了12.4°×26.8°的二维扫描,0.8°的光斑发散角。其中,超透镜被制作于硅片上,具有68%的透过率。
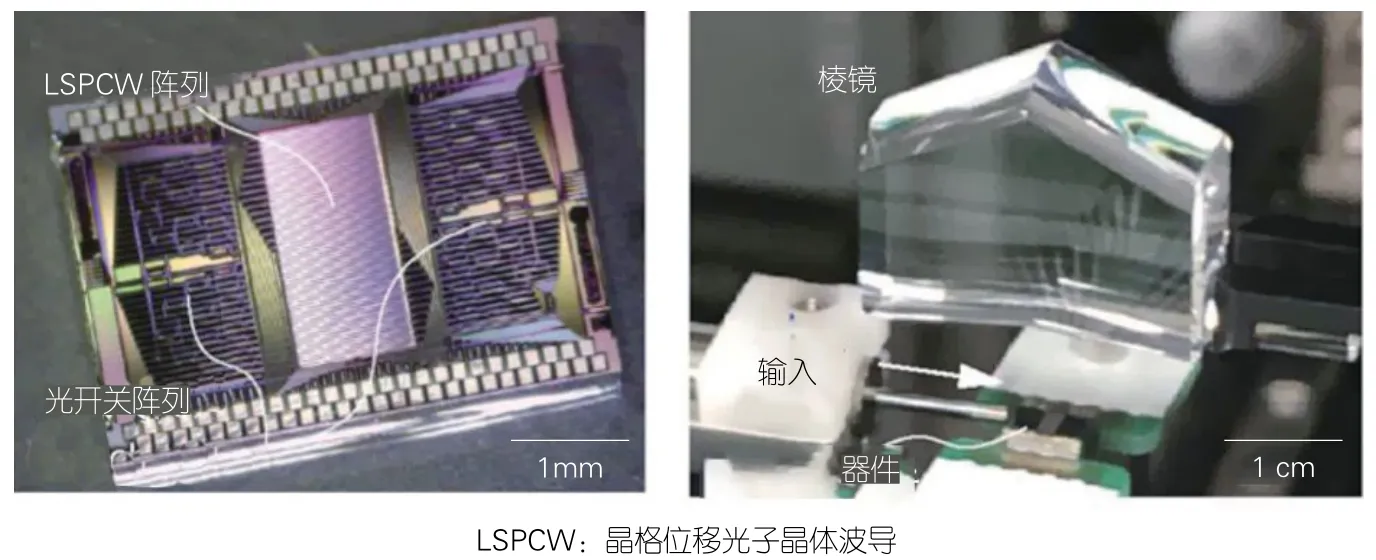
▲图6 光学晶体波导光开关阵列加特殊透镜激光雷达
2020年,日本横滨大学的TOSHIHIKO B.团队采用光开关网络加特殊透镜的形式[20],如图6所示。他们在硅光平台上制作了光学晶体型的波导及左右对称1×16光开关网络,并采用一个定制的特殊形状的透镜,实现了40°×4.4°的二维扫描,光斑发散角为0.15°,可分辨发射光斑有效点数为4 256个。该芯片性能可媲美512路OPA芯片,但更容易实现。这对光开关阵列加透镜形式的激光雷达芯片的发展起到极大的推动作用,未来将会受到越来越多的研究者的青睐。
虽然硅基光开关阵列形式的激光雷达芯片在近几年受到越来越多的研究者的青睐,但其本身存在一定局限性,最主要是受限于光开关阵列的规模。由于光开关形式的激光雷达芯片是通过切换不同的光学天线来实现不同角度的扫描。若要满足实际运用的需求,则需要非常多的光学天线,也就是需要非常大的光开关阵列,这将使得片上的光损耗非常大。所以这种形式的激光雷达芯片仍需要进一步研究,直到解决上述问题并最终满足实用需求。
3 结束语
激光雷达作为自动驾驶技术的核心部件,受到广泛关注。其中,硅基集成的全固态激光雷达更是被誉为下一代产品,将替代现有的机械式或MEMS激光雷达。本文中,我们论述了硅基相控阵激光雷达和硅基光开关阵列激光雷达的工作原理及发展历程,并对比了这两种形式激光雷达各自的特点。其中,硅基相控阵激光雷达的研究开展较早,目前已取得显著成果;硅基光开关阵列激光雷达开展较晚,但是由于其极其简单的实现方式将得到迅猛的发展。目前,以上这两种架构的硅基激光雷达均处于研发阶段,国际上还没有相关产品的报道。希望经过科研人员的不断努力与创新,硅基相控阵激光雷达能够早日达到商用水平。