浅谈PLC在钢带冲裁机电气控制系统中的应用
2020-07-04朱宇诚


摘要:针对钢带冲裁的特点,从方案设计、控制系统硬件选型和控制系统软件设计等方面,研究了西门子PLC在钢带冲裁机电气控制系统中的应用情况。在钢带冲裁机电气控制系统设计前,首先对需生产的钢带工艺要求进行分析,确定系统动作流程;再根据自动冲裁机的特点和功能需求,确定系统的硬件构成,即使用西门子S7-200 CPU226 PLC作为核心控制器,使用气缸作为执行元件,使用磁性开关、接近开关作为到位信号传感器,使机器的硬件系统体积小,控制原理简单,运行稳定性高,成本低廉,维修便利;最后在所选用硬件的基础上编写控制梯形图,从而实现钢带的自动冲裁生产,减少了人工成本,提高了生产效率。
关键词:自动冲床;PLC;气动
0 引言
冲裁是指利用冲模使部分材料或工(序)件与另一部分材料、工(序)件或废料分离的一种冲压工序。冲裁是包括剪切、落料、冲孔、冲缺、冲槽、剖切、凿切、切边、切舌、切开、整修等分离工序的总称。随着冲裁技术的不断发展和广泛应用,越來越多的行业离不开冲裁技术,尤其是电器、飞机、汽车、船舶、电动机、仪表和日用化工等行业。电气自动化控制技术自应用于工业生产领域以来,发展迅速,已经成为很多行业生产中的重要设备技术,为提升工业生产力提供了有力保障。本文在PLC相关理论基础上,结合具体案例,探讨PLC在钢带冲裁机电气控制系统中的应用。
1 设备概况
电除尘器放电钢带自动冲裁机是利用两台普通冲床和一套自动送料设备组合而成的专用自动冲裁设备,整机有1台PLC作为控制中枢,5个气缸作为执行机构,11个传感器用于反馈机器信号。
2 方案设计
2.1 自动钢带冲裁机功能概述
自动钢带冲裁机需加工的钢带为电子除尘器的放电钢带,如图1所示,钢带由两侧50 cm的固定安装区域加上中间50 cm整倍数的放电齿条区域组成,不同大小的除尘器所需的钢带长度不一样,但是固定安装区域和放电齿条区域都为50 cm的整数倍。因为每次送料距离固定,所以送料装置选择行程固定为50 cm的气缸,且只需在PLC程序上调整进给次数即可满足不同长度钢带的生产需求。
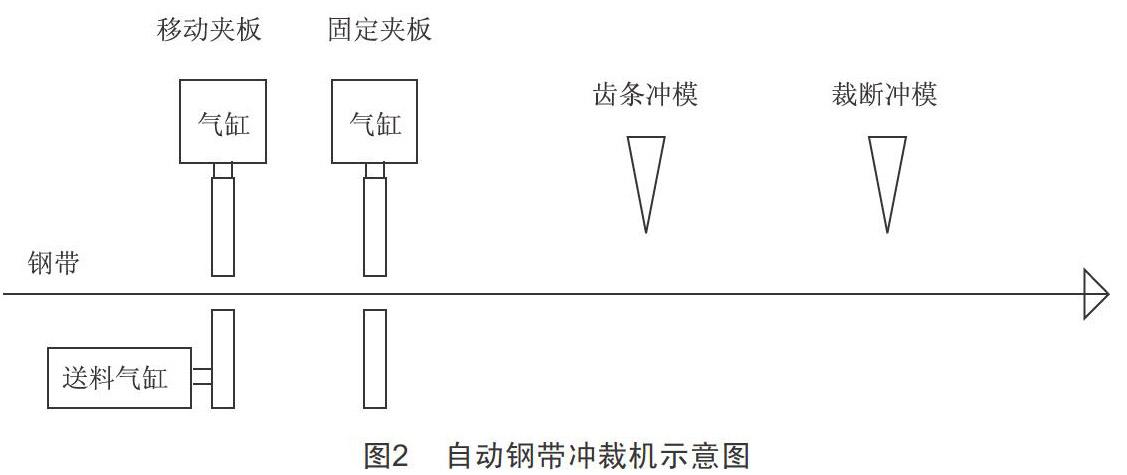
自动钢带冲裁机的送料装置由三个气缸控制两个夹板组成,使用了两台普通冲床配合两套不同的模具,一套模具用于冲裁出齿条,另一套模具用于裁断钢带和冲裁定位孔。启动冲压的脚踩开关使用普通的双作用气缸替代,再用PLC控制这些气缸,实现冲压自动化。自动钢带冲裁机示意图如图2所示。
2.2 自动钢带冲裁机系统动作流程
自动钢带冲裁机的工作过程为:各机械部件复位→送料进给→冲裁齿条→循环送料进给冲裁齿条→空走两次送料进给→裁断和冲裁定位孔冲压→下一个钢带加工循环→直到加工完毕→停机。其中循环送料进给冲裁齿条的次数为“(钢带长度/50)-2”次,这减少的2次为固定安装区域的位置。裁断和冲裁定位孔冲压每送料“钢带长度/50”次,则动作一次。
3 硬件选型
3.1 控制器PLC的选型
目前市场上PLC生产厂家有很多,比较著名的有西门子、三菱、欧姆龙、施耐德等,虽然不同厂商的PLC功能基本相同,但是各厂商有自己的编程指令和软件,而同一厂商的PLC又有许多不同的系列、不同的型号,所使用的场合不尽相同,且价格差异大。所以选择适合的PLC至关重要。
在PLC选型时,首先要根据使用功能进行选型,例如西门子PLC S7-200系列最多有两路脉冲输出,因此所设计的机器如需两路以上脉冲输出,就不建议选用此机型。其次,要根据I/O点数估算进行选型。I/O点数是PLC选型的一项重要指标,PLC的价格直接和I/O口数量呈正相关,在满足系统控制要求的基础上多预留20%左右就可估算I/O口数量。PLC能否正确动作直接关系到机器的稳定性,选型时如果经济许可,尽量选用大品牌的PLC,且需在设计I/O口容量的基础上有一些冗余,以便满足后续的功能扩展需求。
本系统选用的PLC型号为西门子S7-200 CPU226,该机型有集成24输入/16输出共40个数字量I/O点;可连接7个扩展模块,最大扩展至248路数字量I/O点或35路模拟量I/O点;13K字节程序和数据存储空间;6个独立的30 kHz高速计数器,两路独立的20 kHz高速脉冲输出,具有PID控制器。两个RS485通信/编程口,具有PPI通信协议、MPI通信协议和自由方式通信能力。该型号满足本系统15输入/8输出要求,也便于以后新增人机界面或多机器通信功能。西门子S7-200系列为我国工厂大量使用的一种机型,运行稳定,功能齐全,价格较为便宜,适用于对控制要求较高的中小型机器。
3.2 气缸选型
气缸是指气压传动中将压缩气体的压力能转换为机械能的气动执行元件,气缸使用安装简单,可在恶劣条件下工作,维护简单,非常适合精度要求不太高的往复直线运动。相比于电机驱动,无需丝杆,无需提供电源,节约了大量成本。本系统选用的气缸均为双作用气缸,双作用气缸是一种从活塞两侧交替供气,在一个或两个方向输出力的气缸。
3.3 传感器的选型
作为机器的“感觉器官”,传感器的重要性毋庸置疑,选择合适的传感器能让机器做出正确动作,本系统中气缸的动作传感器选用气缸配套的磁性开关,磁性开关是通过检测运行过程中气缸活塞上面的磁环,确定气缸的运动状态的一种传感器,具有使用方便、可靠性好、寿命长、反应时间快、价格低廉等特点。
冲裁模具位置信号和有料检测选用接近开关。接近开关是一种无需与运动部件接触即可反馈信号的位置开关,当物体接近开关的感应面到动作距离时,不需要机械接触及施加任何压力即可使开关动作,从而给PLC装置提供控制指令,具有动作可靠、性能稳定、频率响应快、应用寿命长、抗干扰能力强等特点。
4 软件设计
4.1 PLC的I/O地址分配
在编写PLC程序前,先明确PLC的输入/输出点,输入/输出点又称I/O地址,PLC通过输入点接收开关指令、各传感器传回的信号,通过输出点给执行机构传递动作指令,本系统的PLC输入/输出点分配如表1所示。
4.2 PLC控制系统程序
編程语言使用梯形图,梯形图是PLC最通用的图形编程语言,在电气设计中得到广泛使用。梯形图语言沿袭了继电器控制电路的形式,在常用的继电器与接触器逻辑控制基础上简化了符号演变而来,具有形象、直观、实用等特点。
4.2.1 复位网络
复位网络有开机自动复位网络和手动复位网络。机器运行中难免会出现故障,故障处理过后PLC内部的继电器、定时器等动作状态是未知的,如果不清除复位,贸然启动,容易造成误动作损坏机器,而如每次故障均需通过PLC通断电复位,影响PLC寿命,因此设置手动复位。
4.2.2 基础动作网络
主程序使用梯形图按动作顺序组成,如图3所示,该梯形图使用了定时器和传感器信号共同控制的模式,I0.6为上一步动作移动夹板上移到位后传感器的反馈信号,定时器T45为上一步动作预计的动作时间。为了防止因传感器故障引起的误动作,用定时器T45的一个常开触点锁定,保证只有在移动夹板上移、送料气缸归位前这一状态下接收的移动夹板上到位信号,才能触发送料气缸归位动作。
4.2.3 齿条冲裁计数网络
S7-200 PLC的计数器指令有3种,分别为增计数器指令(CTU)、减计数器指令(CTD)和增/减计数器指令(CTUD)。本系统使用的计数器均为增计数器,增计数器在每一个CU输入的上升沿递增计数,直至计数最大值。当当前计数数值大于或等于预置计数值(PV)时,该计数器被置位。每完成一次送料动作继电器M3.4置位、复位各一次,计数器C1计数数值增加1;当送料次数达到预设值时,计数器置位,继电器M7.0置位,此时齿条冲裁网络上的继电器M7.0常闭触点断开,主程序循环将跳过齿条冲裁网络,进入空走步骤。齿条冲裁计数梯形图如图4所示。
5 结语
本文使用西门子PLC作为控制中枢,结合具体案例,探讨了钢带冲裁机电气控制系统中的硬件设计和软件设计,为PLC在自动冲裁系统和中小型电气自动化机器中的应用提供了参考。
如今我国工业企业的自动化程度和发达国家比起来还有很大差距,我国大量的机械设备仍使用传统的开关继电器模式进行控制。随着我国人工成本的提高,如果工业生产继续走人工生产、人工加工的道路,我国工业将会因低下的产能、高额的生产成本而发展停滞,所以我国工业产品想要在国际上占有一席之地,就要积极发展工业自动化,而PLC作为工业自动化生产中的核心,在未来也将拥有非常好的发展前景。
随着PLC技术日趋成熟,PLC发展已趋向微型化、集成化、模块化和智能化。相比于早期的PLC,新型的PLC功能更强,性能更稳定,使用更简便。如今工业物联网已是大势所趋,新型的PLC控制器现在都已具有通信接口,未来必将在工业自动化、汽车电子、交通运输、物联网控制等领域得到愈来愈广泛的应用。
[参考文献]
[1] 张志田.西门子PLC项目式教程[M].北京:机械工业出版社,2016.
[2] 王阿根.西门子S7-200 PLC编程实例精解[M].北京:电子工业出版社,2011.
[3] 赵勇.传感器敏感材料及器件[M].北京:机械工业出版社,2012.
收稿日期:2020-01-16
作者简介:朱宇诚(1990—),男,福建龙岩人,工程师,研究方向:电气自动化。
