双孢菇采摘机械手末端执行器设计与分析
2020-07-04程鼎豪

摘要:为解决双孢菇人工采摘效率低的问题,设计了一种双孢菇采摘机械手末端执行器。该末端执行器采用仿形弹性夹持套结构,套筒内填充有液性塑料,由气缸驱动液性塑料内推杆的伸长,使夹持套上部张开下部收缩,实现夹持功能。该装置采用整体式外观及弹性材料,可代替人工实现双孢菇柔性采摘,清洗方便,有效保证了采摘质量和清洁度。
关键词:采摘;末端执行器;设计;液性塑料
0 引言
双孢菇(俗称“白蘑菇”)味道鲜嫩,含有多种营养物质,是全球性栽培的食用菌。随着现代栽培技术的发展,工厂化生产已成趋势。我国双孢菇采用工厂化生产后,产量逐年增加,目前种植范围遍及全国,年产量和年出口量均居世界前列[1]。双孢菇工厂化栽培、采摘、检测、分级包装过程中,对周围设施要求较高,如菇房的温度、湿度、CO2含量及各种杂菌等因素对双孢菇生产品质有较大影响。目前双孢菇的采摘为人工操作,效率较低且影响菇房环境,不利于提高生产效率和产品质量。随着劳动力日益紧缺,设计先进的采摘、分拣机器人势在必行。采摘、分拣机器人是一种高效的自动化装置,其关键部件为机械手末端执行器,用来夹持蘑菇,完成采摘和分拣动作。
国内外许多科研机构和学者对采摘机械手末端执行器进行了大量的研究[2-5],目前采摘机械手多采用刚性夹持,研究内容多为运动分析。双孢菇品质娇嫩,对夹持力要求严格,不宜采用一般的刚性机械手进行夹持。
本文设计了一种机械手末端执行器并对夹持力进行了分析,在机械手臂的作用下,采用柔性夹持力,完成对双孢菇的按压、夹持、旋转、摘取四个动作,整体式的外形,保证了双孢菇的品质,容易清洗,不会对采摘对象及周围造成污染。
1 采摘机械手末端执行器设计
双孢菇菌丝贴基质表面成簇生长,生长过程中,大小不一,位置方向不确定,没有固定的行距和株距。采摘期的双孢菇菌盖直径5~12 cm,白色半球形,表面光滑,具有弹性;菌柄近圆柱形,直径1.5~3.5 cm,长4.5~9 cm。双孢菇质量较轻,所需的夹持力较小,在菌盖上产生极小的变形量即可实现夹持。
用机械手去采摘双孢菇时,不能直接用力,以免拉动根部的基质,影响其周围其他菇的正常生长。实际采摘时,先接触双孢菇,向下施加压力,然后通过夹持套内的圆周力夹紧双孢菇头部,机械手腕扭动一定角度,双孢菇随之转动一定角度,双孢菇根部脱开基质的束缚,机械手臂抬升,完成采摘动作。因此,机器人执行采摘动作,需要机械手臂、手腕和末端执行器共同配合完成工作。机器人控制系统通过控制机械手臂、手腕位置,使末端执行器定位于空间某个预定位置。
末端执行器是指与机械手的腕部末端相连的装置,末端执行器的动作由机器人控制器直接控制。机械手手腕是连接机械手手臂和末端执行器的装置,它的作用主要是在机械手手臂运动的基础上进一步改变末端执行器在空间的方位,在扩大机械手动作范围的同时,使机械手变得更灵巧,适应性更强。为使得末端执行器能够到达空间的任意位置,腕部具有独立的自由度,能够实现在空间三个坐标轴上的转动。本文仅研究末端执行器,设计的末端执行器能够实现夹持器的向下压力和圆周的夹紧力。
1.1 末端执行器结构组成
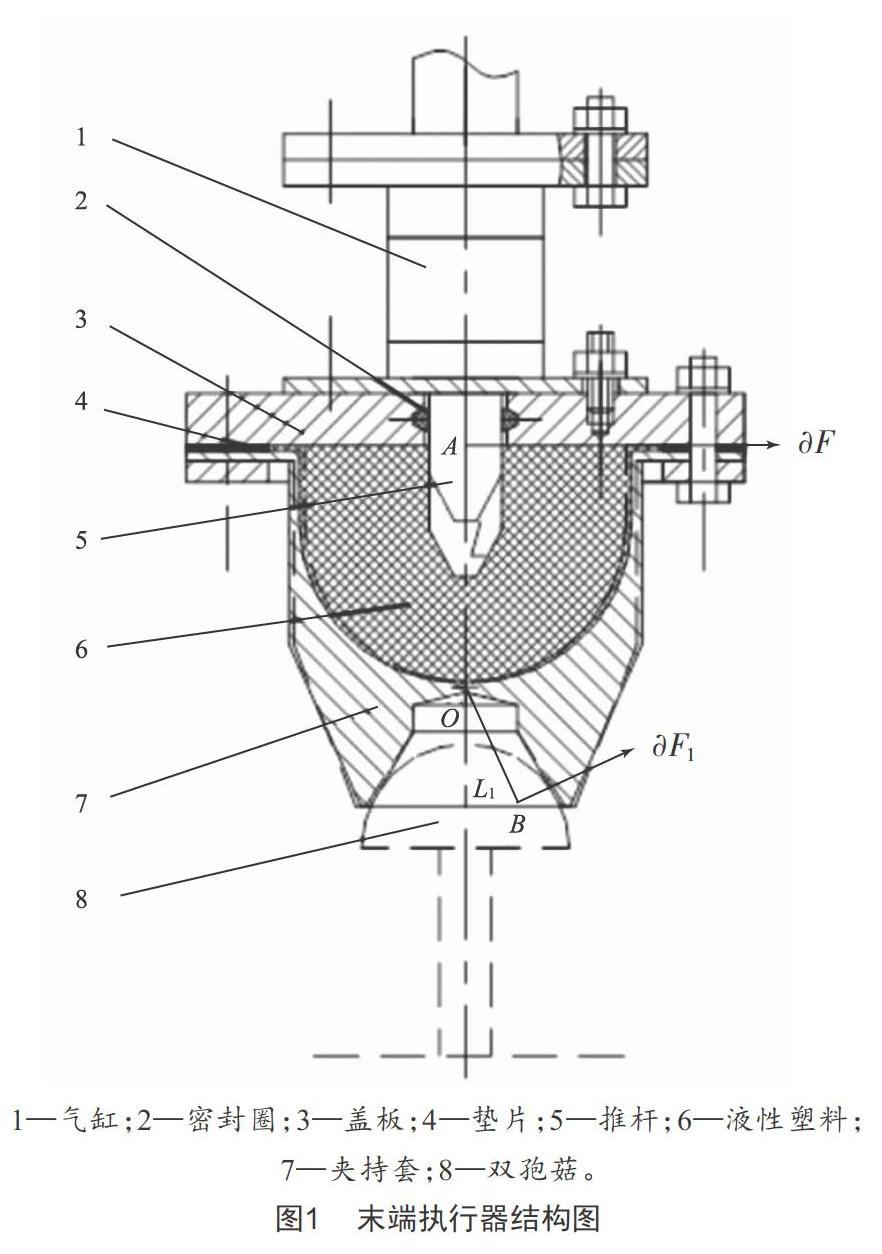
采摘机械手末端执行器结构如图1所示。
该装置由气缸和弹性夹持机构组成。气缸为动力元件,夹持套为夹紧元件。气缸安装在末端执行器上端,用螺栓连接,带动推杆上下移动。夹持套内充填液性塑料,夹持套上部有盖板将液性塑料封闭在球形容器内。
夹持套外形为整体式,结构简单,方便清洁消毒,不会对夹持物及周围环境造成污染,适用于对清洁度要求比较高的环境。夹紧部位为圆形,夹持角度广,可采摘不同角度、不同大小的蘑菇。夹持套的材料为弹性材料,采用柔性夹持力,对采摘目标施加有限的夹持力,适用于对外观质量要求比较高的蘑菇进行采摘。
1.2 工作原理
在机械臂的作用下(本文不对此做研究),末端执行器移至双孢菇上方。气缸工作,使推杆下移,挤压夹持套内部的液性塑料,使其产生膨胀力,夹持套产生微变形,一方面向下移动,对双孢菇施加向下的压力,另一方面夹持套上部被涨开,下部同时产生反方向的微变形,夹紧双孢菇。上述两种力同时施加在双孢菇菇盖上,完成按压、夹持动作。随后,机械手臂产生旋转动作,带动夹持套及双孢菇旋转,手臂提升,将采摘的双孢菇移到指定位置。此时,气缸带动推杆上移,夹持套内液性塑料膨胀力消失,松开双孢菇,采摘工作结束。
2 夹持力分析
代入数据,得ΔR=0.22 mm。即该点的夹持变形量为0.22 mm,变形較小,对双孢菇的影响可忽略不计。
由上述分析可知,液性塑料工作压力对夹紧力的影响规律与推杆伸长量有关,伸长量越大,液性塑料的压力越大,夹持套的弹性变形越大。
3 结语
本文设计了一种采摘机械手末端执行器,该装置由气缸和弹性夹持机构组成,安装在采摘机器人手臂上,配合机械手臂完成夹持、按压动作,代替人工采摘双孢菇,能适应不同大小、不同方位的双孢菇采摘,具有柔性夹持、容易清洗等特点。
[参考文献]
[1] 王荣先,赵向鹏,林士兰,等.双孢蘑菇工厂化生产关键装备研究现状及对策[J].农业工程,2019,9(11):59-62.
[2] 徐丽明,刘旭东,张凯良,等.脐橙采摘机器人末端执行器设计与试验[J].农业工程学报,2018,34(12):53-61.
[3] 王宜磊,陈霖,易柳舟,等.猕猴桃采摘机械手末端执行机构的设计[J].食品与机械,2018,34(1):89-91.
[4] 姜秀玲.基于PLC的苹果采摘机械手运动控制系统设计[J].农机化研究,2017,39(11):203-207.
[5] KONDO N,TING K C.Robotics for bioproduction systems[M].American Society of Agricultural Engineers,1998.
[6] 张景松,杨春敏.流体力学[M].徐州:中国矿业大学出版社,2010.
[7] 李青.利用塑料膨胀芯轴提高气缸套同轴度[J].机械制造,1999(2):20-21.
[8] 刘鸿文.材料力学Ⅰ[M].6版.北京:高等教育出版社,2017.
收稿日期:2020-01-17
作者简介:程鼎豪(1998—),男,河南洛阳人,研究方向:机械制造及自动化。
