无人船搭载双频单波束的河道水下地形三维模型构建
2020-07-04王庆洋
摘要:城市内陆河流是重要的排洪泄洪通道,获取准确的水下地形三维模型对排洪量准确估算意义重大。针对传统RTK测量内河水深点云密度低、深水区域难以获取数据,浅水、未知等困难区域船基难以到达等问题,采用无人船搭载双频单波束同时获取水下地形和淤泥层界数据,并给出了数据处理、数据内插及三维建模的整体技术方案。在上海市闵行区某河道进行了实验,验证了数据获取和三维建模方法的有效性。
关键词:无人船;水下地形;水下淤泥层;三维模型
0 引言
伴随着社会、经济快速发展,城市建设规模日益扩张,自然环境恶劣变化,城市中内陆河道的防洪、蓄洪、航运等能力需要不断地加强与改善,对内河水体进行准确测量与勘查对河道治理、疏通、排淤等后续决策工作意义重大[1-3]。三维立体真实感地形图具备可视度高、使用方便等优势,得到了用户和政府决策部门的青睐[4]。目前,传统内河河道水下地形多借助人工RTK测量,费时、费力、安全性差且获取水深数据密度低;基于小型橡皮艇、竹筏或木船搭载声学换能器的测量方法可获取相对高的点云密度,但仍需人工作业,在水流湍急、地形变化复杂区域作业危险性较高[5]。受河流冲积造成土壤迁移、沉积,人们日常生活排污,采石挖沙等因素的影响,河道淤积现象严重,进而带来了河道变窄、改道等问题[6]。近年来,中国各路台风肆虐,异常天气增多,当洪水来临时,内陆河道排洪泄洪能力减弱,将影响人民群众生命、财产安全。因此,有必要准确测量内陆河道水下地形及淤泥层界范围,掌握河道变化情况,推估泄洪能力,进行水情预报,为政府决策提供基础地理信息数据。
实时、无人、自动化是现代水下测量的发展趋势,基于无人船技術的测量系统,为解决内河水下地形地貌测量面临的上述难题提供了较好的解决方案。本文简要介绍了无人船测量系统、水下地形及淤泥层界测量、水下三维模型构建方法等关键技术,并通过实验验证了其可行性。
1 关键技术
1.1 无人船测量系统
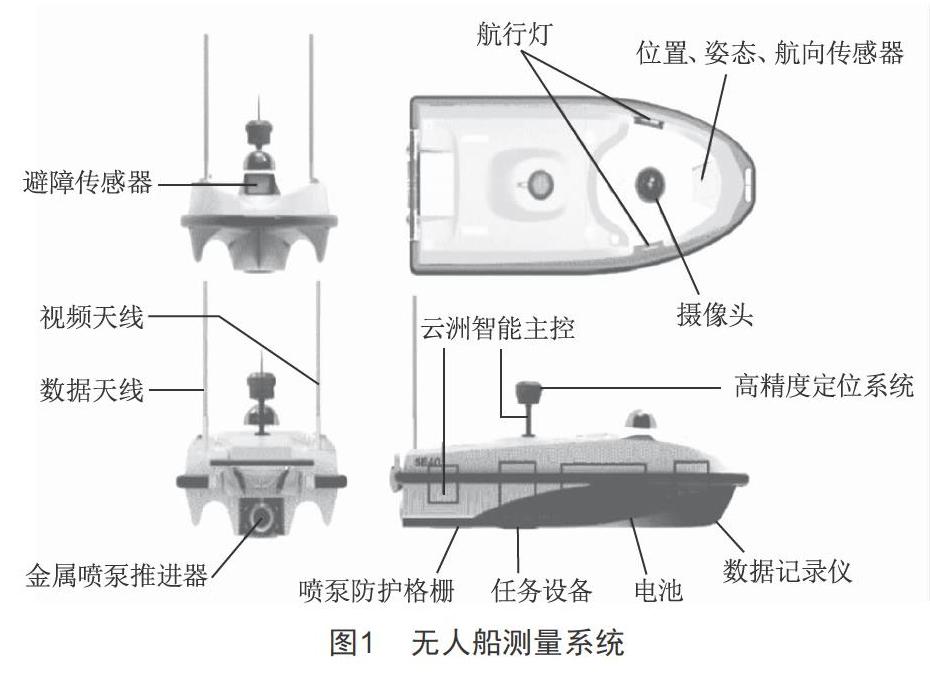
无人船测量系统利用其搭载的多种高精度传感仪器,进行内陆河道区域水下测量工作,具有无人化、集成化、自动化、智能化以及网络化等特点。测量型无人船多搭载两个系统:(1)遥控无人测量船子系统,包括动力系统、电源系统、船上控制系统、测量声学设备和无线数据传输模块等;(2)岸基控制子系统,通过无线传输协议,实时接收、分析、处理和显示遥测船体发送的数据,控制测量船路线或手动走线测量[7]。无人船测量系统能够实现自主导航和智能避障,同时可以对工作状态、航姿、任务状态及测量数据实现实时通信。本次使用的无人船测量系统如图1所示。
1.2 水下地形及淤泥层界测量
目前,水下地形测量主要采用GNSS获取测深点的平面坐标及水面高程,配合水下测深仪器同步采集水深。其中水下测量仪器主要分为多波束测深系统和单波束测深仪两种,影响其测深精度的因素主要包括测量平台姿态变化、换能器吃水、声速、水位、测深仪器本身系统误差等[8]。
双频单波束测深仪其低频具备穿透淤泥层的测量功能,可测得河底淤泥下表层点状数据,即低频回声测深值(h_LF);高频数据返回自河底表层,可认为得到淤泥上表层点状数据,即高频回声测深值(h_HF),同时获取河底地形。因此,利用高低频测深值的差值即可得到淤泥层的厚度:dh=h_LF-h_HF。
考虑内陆河道测量环境、要求和无人船搭载载荷限制,建议内陆河道水下地形测量采用单波束测深仪。因此,内陆河道若同时测量水下地形及淤泥层界,可基于双频单波束完成。
1.3 水下三维模型构建
数据采集完毕后,水下三维模型构建主要包括如下几个步骤:
(1)异常数据滤波,剔除明显的噪声点。
(2)选择模型。目前水下常用DEM数据结构为规则方格网和不规则方格网(TIN),规则格网具有数据存储结构简单、与遥感影像数据有相合性及表面分析功能良好等优点,但存在计算效率低、数据冗余及格网结构规则等限制;TIN网具有较少的点即可获取较高的精度,具有可变分辨率及良好的拓扑结构等优点,但TIN网存在表面分析能力差、构建繁琐费时、算法设计比较复杂等缺点[9]。在实际应用中具体使用哪种结构,一般由以下几个因素决定:模型的应用目的、数据的可获取性、是否考虑特征点、图形的比例尺及分辨率等。
(3)数据内插。为保证建模数据量,需对格网构建后的数据进行内插,目前常用的内插算法有反距离加权法、克里格内插法及样条函数内插法等等[9]。
(4)建模成图,可以基于OpenGL自己开发三维重建及成图软件,考虑工程应用也可直接基于3d-max等商业软件进行模型建立和纹理贴图处理[10],三维模型的可靠性和美观程度取决于纹理制作的好坏以及纹理粘贴位置的精确度。
2 实验及分析
2.1 实验区域及设备
本次实验区域选取在上海市闵行区某河道。本次实验中采用的主要设备有:无人船测量系统SE40、测深仪(HY1602/SDE-
28D)、GNSS接收机(美国天宝光谱/SP80)、电脑两台。
2.2 采集过程
(1)前期收集测区附近的国家三等水准点资料,获取控制点(平面及高程)数据、测区范围(基于GPS-RTK分别获取测区两个端点坐标);同时租用船只沿河道实地踏勘,详细了解测区环境和河道水面及水下情况。
(2)工作人员根据作业规范、技术要求和踏勘所得情况,内业详细确定外业数据采集方案,具体包括:
1)基于双频单波束测深仪获取水深及淤泥层数据。
2)根据测区范围,设计无人船测量断面计划线,计划线基本垂直于河道水流方向。
3)无人船断面航行间距为5 m,船速一般在4~6节,水下测量数据采集间隔为1 m一个点;测线间转弯时适当减速,减小船体的倾斜引起的测量误差。
4)为避免无人船碰撞浅石及岸边石块,租用木船,工作人员划木船随无人船测量,当情况复杂时,改变无人船作业模式为手动控制;测量过程中时刻关注水深测值的异常,当出现测值缺失或其跳跃幅度较大时应及时停止船舶的前进,检查仪器运行情况。
(3)基于上述作业方案,测量得到测区原始水深及淤泥层界数据,当天对完成的测量数据进行内业数据检查和处理;对发现存在的问题及稀疏测线区域,第二天进行重测及加密测量。
(4)对测量所得结果进行分类整理和归档,获取河道的原始测量水深及淤泥层界数据。
2.3 水下模型构建和无人船测量精度分析
(1)对测量所得水深、淤泥层界数据进行滤波;联合无人船GNSS定位、船体吃水、换能器距离水面高度和水深数据计算所得水面、水底及淤泥层下界的绝对高程数据(吴淞高程),水底与淤泥层下界的高程数据在CAD中需分层处理,整理并生成带有高程属性的CAD等高线或者高程点。
(2)针对水下测量的特殊性和复杂性,展现水下地形地貌趋势。数字高程模型(DEM)按照数据的表现形式主要分为两种:不规则三角网(TIN)和规则格网,TIN采用离散数据点生成的连续的不重叠的不规则三角网来表示地形,本次选取河道范围小,河底地形相对起伏变化明显,因此采用TIN可以构建出较多的三角形,能够精细地反映地形特征。
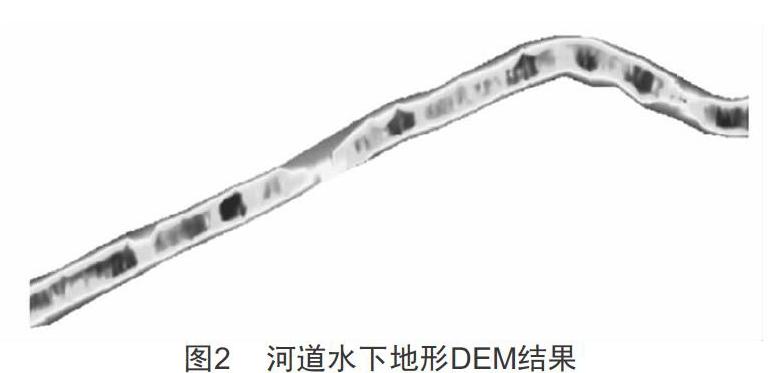
基于ArcGIS软件生成数字高程模型(DEM):1)将导入的等高线或高程点数据转换为GIS可编辑的Shapefile文件;2)进一步整理、检查、修正Shapefile文件中的数据错误;3)使用整理好的Shapefile生产数字高程三角模型TIN文件;4)将TIN文件转换为栅格数字高程模型DEM文件。本次河道的水下数字高程模型(DEM)如图2所示。
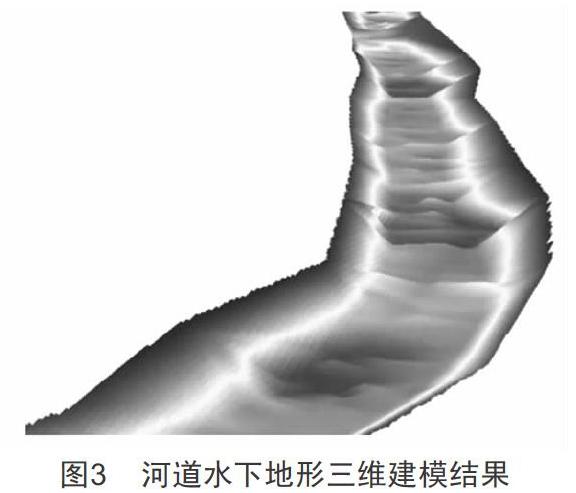
(3)对数字高程模型(DEM)进行立体化处理,基于ArcScene软件进行三维建模,并对模型和贴图进行修改和美化,最终形成三维模型。本次河道的水下三维模型如图3所示。
(4)外业数据准确性直接决定着构建模型的可靠性,为验证无人船测量结果,本次采用人工手段利用网络RTK的方式,去复核数据的准确性。根据无人船的测量成果,实地测设部分数据,本次共测设并复核54个无人船数据。基于RTK水下地形(吴淞高程)测量散点高程数据,对无人船测量结果(吴淞高程)进行同精度比较验证,统计结果如表1所示。统计结果表明,基于无人船搭载双频单波束可获取高精度的水下地形测量结果。
3 结论与建议
本文基于无人船搭载双频单波束实现了河道地形及淤泥层数据的准确获取,并给出了三维模型构建流程,得到了水下三维地形及淤泥层模型,为后续相关类型项目作业实施和数据处理提供了作业指导和技术支撑。同时,实验过程中发现无人船测量系统存在和亟需解决的问题如下:
(1)通信问题。内陆河道大都弯曲变化复杂且两旁多为树林密集区域,岸基和无人船系统的通信时常中断,导致测量失败,此时,解决办法为移动岸基天线,费时费力。
(2)避碰技术。虽然采用了无人船的避碰和航线自主规划功能,但内陆河道多存在暗石,水下地形变化复杂,岸边操控存在视觉盲区;实际作业时大部分区域仍然租用船只,操控手基于母船遥控无人船完成测量,一定程度上增加了作业成本和降低了效率。
[参考文献]
[1] 骆旭佳,王杉杉.内陆水域水下地形测绘在信息化测绘体系建设过程中的新发展[J].大坝与安全,2016(5):50-52.
[2] 曹民雄,应翰海,申霞.长江南京以下深水航道二期工程碍航水道演变特性及航道治理思路[J].水运工程,2018(2):1-12.
[3] 李学祥.内河数字航道技术总结与展望[J].测绘与空间地理信息,2017,40(9):14-19.
[4] 伍莉,彭文.长江航道水下地形三维可视化研究[J].海洋测绘,2008,28(4):27-29.
[5] 周建红,马耀昌,刘世振,等.水陆地形三维一体化测量系统关键技术研究[J].人民长江,2017,48(24):61-65.
[6] 黄国良,徐恒,熊波,等.内河无人航道测量船系统设计[J].水运工程,2016(1):162-168.
[7] 陈良周,陈丽丽.智能无人测量船在河道水下地形测量中的应用研究[C]//第十九届华东六省一市测绘学会学术交流会暨2017年海峡两岸测绘技術交流与学术研讨会论文集,2017:337-340.
[8] 郑亚慧,冯传勇,许朝勇.内陆水域水下地形测量中声速改正方法探讨[J].人民长江,2018,49(8):45-48.
[9] 张家豪,周丰年,程和琴,等.多模态传感器系统在河槽边坡地貌测量中的应用[J].测绘通报,2018(3):102-107.
[10] 詹总谦,林元培,艾海滨.基于3ds Max二次开发的建筑物快速三维重建[J].测绘通报,2016(11):22-25.
收稿日期:2020-02-25
作者简介:王庆洋(1985—),男,上海人,工程师,研究方向:测绘测量设计。
